You might also like
- Linear Algebra Problem Sheet SolutionsDocument14 pagesLinear Algebra Problem Sheet SolutionsGag PafNo ratings yet
- Solving matrix equations for population growthDocument15 pagesSolving matrix equations for population growthGag PafNo ratings yet
- Unit 9: Hyperplanes: Juan Luis Melero Ans Eduardo Eyras October 2018Document19 pagesUnit 9: Hyperplanes: Juan Luis Melero Ans Eduardo Eyras October 2018Priyansh RajputNo ratings yet
- Topology of NumbersDocument104 pagesTopology of NumbersBrow BrungNo ratings yet
- Vectors 11Document18 pagesVectors 11davidthirumalai97No ratings yet
- Inner PDFDocument15 pagesInner PDFT BlackNo ratings yet
- Intro Abstract AlgebraDocument200 pagesIntro Abstract AlgebraThales mathNo ratings yet
- Chapter 6Document29 pagesChapter 6udayNo ratings yet
- ComplexNumbers, Functions, FactoringDocument13 pagesComplexNumbers, Functions, FactoringabusulavaNo ratings yet
- Section 4-1Document18 pagesSection 4-1El Jay AlagNo ratings yet
- Vector Field ProblemDocument7 pagesVector Field ProblemJamen KNo ratings yet
- Polar Coordinates: Points, Curves, and GraphingDocument5 pagesPolar Coordinates: Points, Curves, and GraphingHawraa HawraaNo ratings yet
- Topology NumbersDocument129 pagesTopology Numbersf100% (1)
- Solution Set 3Document11 pagesSolution Set 3HaseebAhmadNo ratings yet
- 2003 - Paper IIIDocument6 pages2003 - Paper IIIhmphryNo ratings yet
- Sons - 2002 LSE Linear Algebra MA201Document15 pagesSons - 2002 LSE Linear Algebra MA201Gag PafNo ratings yet
- Week13 14Document21 pagesWeek13 14Abdurrahman HazerNo ratings yet
- Ugmath2022 22may Partb SolutionsDocument6 pagesUgmath2022 22may Partb SolutionsTECH GAMERSNo ratings yet
- 2001 - Paper IIDocument6 pages2001 - Paper IIgrahamlaming69No ratings yet
- Section 12.5 Equations of Lines and PlanesDocument2 pagesSection 12.5 Equations of Lines and PlanesAlvin AdityaNo ratings yet
- Plane Practice ProblemsDocument9 pagesPlane Practice ProblemsANU SAJINo ratings yet
- 1.1 The Cartesian Coordinate SpaceDocument4 pages1.1 The Cartesian Coordinate SpaceArunabh SinghNo ratings yet
- Section A: Pure MathematicsDocument6 pagesSection A: Pure MathematicsMohammed ArslaanNo ratings yet
- 1920sem2 Ma1521Document15 pages1920sem2 Ma1521mig fooNo ratings yet
- Master's Open Math Problem SolutionsDocument10 pagesMaster's Open Math Problem SolutionsJavad Rahmany FardNo ratings yet
- Constructibility of Regular PolygonsDocument26 pagesConstructibility of Regular PolygonsSamuel SilvaNo ratings yet
- Linear Algebra - Solution To Test 1Document3 pagesLinear Algebra - Solution To Test 1Juan Felipe SolorzanoNo ratings yet
- Convex Functions: See P. 10 of The Handout On Preliminary MaterialDocument20 pagesConvex Functions: See P. 10 of The Handout On Preliminary MaterialClaribel Paola Serna CelinNo ratings yet
- Lecture 03 - Planes in R^3Document6 pagesLecture 03 - Planes in R^3joel.phillip92No ratings yet
- Homework 1Document5 pagesHomework 1Stacy TashNo ratings yet
- 1999 - Paper IIIDocument6 pages1999 - Paper IIIhmphryNo ratings yet
- Matematical Analysis 1Document5 pagesMatematical Analysis 1Sam SNo ratings yet
- Homework11-Solutions S14 PDFDocument2 pagesHomework11-Solutions S14 PDFsaraNo ratings yet
- Weatherwax - Conte - Solution - Manual Capitulo 2 y 3Document59 pagesWeatherwax - Conte - Solution - Manual Capitulo 2 y 3Jorge EstebanNo ratings yet
- Functions of a Single Variable: Types, Domains, Exponential & Trig Functions ExplainedDocument17 pagesFunctions of a Single Variable: Types, Domains, Exponential & Trig Functions ExplainedMajak MarialNo ratings yet
- 8.02 Complex NumbersDocument5 pages8.02 Complex NumberstaekyoonNo ratings yet
- Lyapunov functions reveal global stabilityDocument8 pagesLyapunov functions reveal global stabilitykamalulwafiNo ratings yet
- Applications of CalculusDocument11 pagesApplications of CalculusSiddharth AcharyaNo ratings yet
- UI 2014 Freshman Math Contest SolutionsDocument3 pagesUI 2014 Freshman Math Contest SolutionsGag PafNo ratings yet
- Paper I 1988 Maths and Mechanics QuestionsDocument7 pagesPaper I 1988 Maths and Mechanics QuestionsfushgeorgeNo ratings yet
- Chap 1Document38 pagesChap 1Saw Beng KeatNo ratings yet
- 7. Straight LineDocument84 pages7. Straight LineDevansh ParasharNo ratings yet
- Week7 9 PDFDocument16 pagesWeek7 9 PDFBrian HaraNo ratings yet
- The Vector SpaceDocument6 pagesThe Vector SpaceBoom EbronNo ratings yet
- 18.721: Introduction To Algebraic Geometry: Lecturer: Professor Mike Artin Notes By: Andrew Lin Spring 2020Document118 pages18.721: Introduction To Algebraic Geometry: Lecturer: Professor Mike Artin Notes By: Andrew Lin Spring 2020Tan ChNo ratings yet
- Probability Distributions: Discrete and Continuous Univariate Probability Distributions. Let S Be A Sample Space With A ProbDocument7 pagesProbability Distributions: Discrete and Continuous Univariate Probability Distributions. Let S Be A Sample Space With A ProbmustafaNo ratings yet
- Ma 204 IitbDocument21 pagesMa 204 IitbsiddharthballalNo ratings yet
- Variables or Real Multivariate Function Is A Function With More Than One Argument, With AllDocument8 pagesVariables or Real Multivariate Function Is A Function With More Than One Argument, With AllMhalyn Üü NapuliNo ratings yet
- Lines and Planes in R3 ExplainedDocument6 pagesLines and Planes in R3 ExplainedAV guptaNo ratings yet
- Lines and Planes in R3 ExplainedDocument6 pagesLines and Planes in R3 Explainedvineetgoyal68No ratings yet
- Metric SpacesDocument21 pagesMetric SpacesaaronbjarkeNo ratings yet
- SimpDocument6 pagesSimpjiekechuiNo ratings yet
- Lecture - 01 - Basic Concepts About Metric Spaces and ExamplesDocument4 pagesLecture - 01 - Basic Concepts About Metric Spaces and ExamplesdnyNo ratings yet
- The Forty-Eighth Annual William Lowell Putnam Competition Saturday, December 5, 1987Document1 pageThe Forty-Eighth Annual William Lowell Putnam Competition Saturday, December 5, 1987El Mamoun LayalNo ratings yet
- NOTES-Intro To Hilbert SpacesDocument28 pagesNOTES-Intro To Hilbert SpacesdebmallyNo ratings yet
- Chapter 1Document11 pagesChapter 1cicin8190No ratings yet
- MA111_Lec8_D3D4Document33 pagesMA111_Lec8_D3D4pahnhnykNo ratings yet
- Training RecDocument6 pagesTraining RecRijal AbedinNo ratings yet
- Cal1 Export PDFDocument246 pagesCal1 Export PDFamarNo ratings yet
- 2b PatternDocument7 pages2b PatternJiri Hybs100% (3)
- Bertermann - ARVID 01912841Document63 pagesBertermann - ARVID 01912841Gag PafNo ratings yet
- 1 Differential Forms in R, N 6 3Document1 page1 Differential Forms in R, N 6 3Gag PafNo ratings yet
- Elly Aj NK Abc GradDocument35 pagesElly Aj NK Abc GradGag PafNo ratings yet
- Ding D 2019 PHD ThesisDocument235 pagesDing D 2019 PHD ThesisGag PafNo ratings yet
- Concepts in Theoretical Physics: Lecture 4: Quantum MechanicsDocument28 pagesConcepts in Theoretical Physics: Lecture 4: Quantum MechanicsGag PafNo ratings yet
- Quantum Field Theory Example Sheet SolutionsDocument17 pagesQuantum Field Theory Example Sheet SolutionsGag PafNo ratings yet
- DG 1Document161 pagesDG 1Gag PafNo ratings yet
- Rare opportunity to acquire exclusive Mayfair office buildingDocument19 pagesRare opportunity to acquire exclusive Mayfair office buildingGag PafNo ratings yet
- General Relativity Solved ProblemsDocument81 pagesGeneral Relativity Solved ProblemsGag PafNo ratings yet
- Real Estate & The Family OfficeDocument11 pagesReal Estate & The Family OfficeGag PafNo ratings yet
- WWW - Ib.academy: Study GuideDocument95 pagesWWW - Ib.academy: Study GuideGag PafNo ratings yet
- §4 Integration of forms: γ 2 −2 ∗ 2 −2 2 3 2 t=2 t=−2 3 t=2 t=−2Document2 pages§4 Integration of forms: γ 2 −2 ∗ 2 −2 2 3 2 t=2 t=−2 3 t=2 t=−2Gag PafNo ratings yet
- Sol 3Document2 pagesSol 3Gag PafNo ratings yet
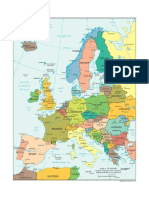
- Explore Europe's RegionsDocument1 pageExplore Europe's RegionsshkrNo ratings yet
- AGC Guide To Construction Financing 2nd EditionDocument26 pagesAGC Guide To Construction Financing 2nd EditionCitizen Kwadwo Ansong100% (1)
- Riemannian Geometry IV, Solutions 6 (Week 6) : (X, Y, Z) 3 (X, Y, Z) 2 (X, Y, Z) 3 2 2 X y ZDocument5 pagesRiemannian Geometry IV, Solutions 6 (Week 6) : (X, Y, Z) 3 (X, Y, Z) 2 (X, Y, Z) 3 2 2 X y ZGag PafNo ratings yet
- Solution Manual For Manifolds, Tensor and Forms ( P. Rentein) PDFDocument170 pagesSolution Manual For Manifolds, Tensor and Forms ( P. Rentein) PDFAnonymous bZtJlFvPtpNo ratings yet
- World MapDocument1 pageWorld MapJaipur Model United NationsNo ratings yet
- General Relativity II: Jan SbierskiDocument72 pagesGeneral Relativity II: Jan SbierskiGag PafNo ratings yet
- Tellurian Inc.: What Is Day Trading?Document1 pageTellurian Inc.: What Is Day Trading?Gag PafNo ratings yet
- Nuevo Mapa Del MundoDocument1 pageNuevo Mapa Del MundoverarexNo ratings yet
- Low Producing Lease Calculation ExampleDocument1 pageLow Producing Lease Calculation ExampleGag PafNo ratings yet
- Tellurian Inc.: What Is Day Trading?Document1 pageTellurian Inc.: What Is Day Trading?Gag PafNo ratings yet
- Tellurian Inc.: Corporate PresentationDocument36 pagesTellurian Inc.: Corporate PresentationGag PafNo ratings yet
- Offering Circular 25 January 2008 - Liberty ACQDocument157 pagesOffering Circular 25 January 2008 - Liberty ACQGag PafNo ratings yet
- Solution Manual For Manifolds, Tensor and Forms ( P. Rentein) PDFDocument170 pagesSolution Manual For Manifolds, Tensor and Forms ( P. Rentein) PDFAnonymous bZtJlFvPtpNo ratings yet
- Corporate Presentation: September 2020Document33 pagesCorporate Presentation: September 2020Gag PafNo ratings yet
- Depression Using Antidepressants in Children and Young PeopleDocument13 pagesDepression Using Antidepressants in Children and Young PeopleGag PafNo ratings yet
- Explore Europe's RegionsDocument1 pageExplore Europe's RegionsshkrNo ratings yet
- Topic 1.1: The Limit of A Function: Arellano University Jose Rizal High SchoolDocument3 pagesTopic 1.1: The Limit of A Function: Arellano University Jose Rizal High SchoolRamos, Casandra Jhane R.No ratings yet
- 3 DTFTDocument20 pages3 DTFTBomber KillerNo ratings yet
- Z Angew Math Mech - 2002 - Lee - The Eigenfunctions of The Stokes Operator in Special Domains IIIDocument9 pagesZ Angew Math Mech - 2002 - Lee - The Eigenfunctions of The Stokes Operator in Special Domains IIIDuc DoNo ratings yet
- ME-MATHS-MODELDocument4 pagesME-MATHS-MODELKevin ShaunNo ratings yet
- (London Mathematical Society Lecture Note Series 44) M. C. Crabb - ZZ - 2, Homotopy Theory (1980, Cambridge University Press)Document135 pages(London Mathematical Society Lecture Note Series 44) M. C. Crabb - ZZ - 2, Homotopy Theory (1980, Cambridge University Press)Luis Arce GonzálezNo ratings yet
- SS Lab ManualDocument48 pagesSS Lab ManualKannan RNo ratings yet
- Mathematical Analysis - Real Sequences and Real SeriesDocument53 pagesMathematical Analysis - Real Sequences and Real SeriesAMV LoverNo ratings yet
- List of DualitiesDocument4 pagesList of DualitiesroyNo ratings yet
- Basic Calculus TMLHT 16 20 GUIDEDocument7 pagesBasic Calculus TMLHT 16 20 GUIDESambo Almira IyogNo ratings yet
- Relations and FunctionsDocument9 pagesRelations and Functions789No ratings yet
- General Math 2ptDocument2 pagesGeneral Math 2ptSusan LorsanoNo ratings yet
- PythonDocument4 pagesPythonGiorgi OrmotsadzeNo ratings yet
- Row Reduction PDFDocument6 pagesRow Reduction PDFkarimiNo ratings yet
- 334 IsometDocument5 pages334 IsometLouis GuyNo ratings yet
- Determinants and Their PropertiesDocument7 pagesDeterminants and Their PropertiesAlvin DairoNo ratings yet
- Laplace Table PDFDocument2 pagesLaplace Table PDFEggy WirahmanNo ratings yet
- Continuity: Saumik Karfa - 9674045777Document2 pagesContinuity: Saumik Karfa - 9674045777Saumik KarfaNo ratings yet
- Matrices Inter First Year ImportantDocument11 pagesMatrices Inter First Year ImportantSyed Salman50% (2)
- DomainDocument4 pagesDomainAaron TingNo ratings yet
- Linear Algebra ModuleDocument38 pagesLinear Algebra ModulekifuyeNo ratings yet
- PRE-CALCULUS - MODULE10 Trigonometric IdentitiesDocument9 pagesPRE-CALCULUS - MODULE10 Trigonometric IdentitiesMaryAnnNevadoNo ratings yet
- Complete metric space: Cauchy sequences and construction of completionDocument6 pagesComplete metric space: Cauchy sequences and construction of completionconmec.crplNo ratings yet
- Higher Order Derivatives and Taylor Expansions: ExampleDocument4 pagesHigher Order Derivatives and Taylor Expansions: ExampleNev SerafimNo ratings yet
- Functions of Two Variables LimitsDocument43 pagesFunctions of Two Variables Limitssakshiverma.hNo ratings yet
- Math 6110 Pset 2Document4 pagesMath 6110 Pset 2Miguel Antonio Leonardo SepulvedaNo ratings yet
- Symmetric and alternating groups decomposition into cyclesDocument13 pagesSymmetric and alternating groups decomposition into cyclessivaNo ratings yet
- (Jean Hladik) Spinors in Physics PDFDocument227 pages(Jean Hladik) Spinors in Physics PDFIgor VM100% (1)
- Multiple Integrals in The Calculus of Variations Oct 2008Document522 pagesMultiple Integrals in The Calculus of Variations Oct 2008falachl100% (4)
- Exponential and Log Functions Quiz Non-Calculator MarkschemeDocument9 pagesExponential and Log Functions Quiz Non-Calculator MarkschemetaengooNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (542)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemFrom EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNo ratings yet
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)
- Ramblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowFrom EverandRamblings of a Mad Scientist: 100 Ideas for a Stranger TomorrowNo ratings yet
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsFrom EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsRating: 5 out of 5 stars5/5 (2)
- The Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026From EverandThe Fast Track to Your Technician Class Ham Radio License: For Exams July 1, 2022 - June 30, 2026Rating: 5 out of 5 stars5/5 (1)
- Programming the Raspberry Pi, Third Edition: Getting Started with PythonFrom EverandProgramming the Raspberry Pi, Third Edition: Getting Started with PythonRating: 5 out of 5 stars5/5 (2)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- The Rare Metals War: the dark side of clean energy and digital technologiesFrom EverandThe Rare Metals War: the dark side of clean energy and digital technologiesRating: 5 out of 5 stars5/5 (2)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- The Graphene Revolution: The Weird Science of the Ultra-thinFrom EverandThe Graphene Revolution: The Weird Science of the Ultra-thinRating: 4.5 out of 5 stars4.5/5 (4)
- High Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsFrom EverandHigh Performance Loudspeakers: Optimising High Fidelity Loudspeaker SystemsRating: 4 out of 5 stars4/5 (1)
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4 out of 5 stars4/5 (331)
- Understanding Automotive Electronics: An Engineering PerspectiveFrom EverandUnderstanding Automotive Electronics: An Engineering PerspectiveRating: 3.5 out of 5 stars3.5/5 (16)