You might also like
- Automatic Conveyor For Industrial AutomationDocument3 pagesAutomatic Conveyor For Industrial AutomationSoni BhattaNo ratings yet
- Electronic Measurements and Measuring InstrumentsDocument45 pagesElectronic Measurements and Measuring InstrumentsNandan PatelNo ratings yet
- Exp 2 RectifiersDocument7 pagesExp 2 RectifiersSamira MahmoodNo ratings yet
- Computer Elements 1Document19 pagesComputer Elements 1Rose ann d casemNo ratings yet
- EEC111 NOTE Updated - 230419 - 165015Document65 pagesEEC111 NOTE Updated - 230419 - 165015Akogun ElizabethNo ratings yet
- OscilloscopesDocument13 pagesOscilloscopesminhtrieudoddtNo ratings yet
- Measurement Course MateialDocument56 pagesMeasurement Course Mateialkalaivani1408No ratings yet
- 1-Which of The Following Is Not Covered Under Mechanical Energy Domain?Document6 pages1-Which of The Following Is Not Covered Under Mechanical Energy Domain?pradnya sadigaleNo ratings yet
- FKE S3 1011 BUKU LOG Amalan KejuruteraanDocument80 pagesFKE S3 1011 BUKU LOG Amalan Kejuruteraanng soo keeNo ratings yet
- Unit 7: A/D and D/A Converter: Lesson 1: Interfacing With The Analog WorldDocument20 pagesUnit 7: A/D and D/A Converter: Lesson 1: Interfacing With The Analog WorldAnonymous Ia9LPz100% (1)
- A Multimeter Is An Electronic InstrumentDocument43 pagesA Multimeter Is An Electronic InstrumentSyachrial Yusuf100% (1)
- Chapter 02 PDFDocument34 pagesChapter 02 PDFKashan KhanNo ratings yet
- Group Assignment # 1 Measurements and Instrumentations Assignment TopicDocument10 pagesGroup Assignment # 1 Measurements and Instrumentations Assignment TopicArsam NasimNo ratings yet
- Setting Up Electronically Controlled Complex SystemsDocument61 pagesSetting Up Electronically Controlled Complex Systemsfrezer mesfin100% (1)
- Digital Multimeter: By: Manvik JoshiDocument10 pagesDigital Multimeter: By: Manvik Joshimanvik joshiNo ratings yet
- Adc and Dac CNV ErrorsDocument26 pagesAdc and Dac CNV ErrorsAnonymous TPVfFif6TO100% (2)
- Basic Electronics 2Document66 pagesBasic Electronics 2Sandhya DeviNo ratings yet
- EEC 122 CompleteDocument34 pagesEEC 122 CompleteAdeniji OlusegunNo ratings yet
- Introduction To InstrumentationDocument126 pagesIntroduction To InstrumentationbelaynehNo ratings yet
- Elect Machine Total 2012Document22 pagesElect Machine Total 2012NGOUNENo ratings yet
- 1 AC and DC Circuit No Multiple ChoiceDocument147 pages1 AC and DC Circuit No Multiple ChoiceJimuelle CallejoNo ratings yet
- 9 Intelligent InstrumentsDocument45 pages9 Intelligent InstrumentsAli Ahmad100% (1)
- Unit 54 Electronic Measurement and TestingDocument12 pagesUnit 54 Electronic Measurement and TestingYuvarajaNo ratings yet
- Introduction To Embedded Systems. Introduction To Microcontrollers. The Arduino Platform / Software Installation. Arduino Board OverviewDocument2 pagesIntroduction To Embedded Systems. Introduction To Microcontrollers. The Arduino Platform / Software Installation. Arduino Board OverviewKakashiGanzNo ratings yet
- Resistor Measurement Using Color CodingDocument4 pagesResistor Measurement Using Color CodingAlain JimeneaNo ratings yet
- Lab # 1 Introduction To Instruments. (Digital Oscilloscope and Digital Function Generator) and Software LtspiceDocument23 pagesLab # 1 Introduction To Instruments. (Digital Oscilloscope and Digital Function Generator) and Software LtspiceMISBAH BATOOLNo ratings yet
- Mechatronics Unit 1Document53 pagesMechatronics Unit 1ஷாம்லி100% (2)
- FractionDocument2 pagesFractionPeter MukhebiNo ratings yet
- Digital MultimeterDocument8 pagesDigital MultimeterCecilyn Joy E. GamuzaNo ratings yet
- Measurements and Instrumentation Question BankDocument4 pagesMeasurements and Instrumentation Question BankSurya SekaranNo ratings yet
- Automation and PLC LAB FileDocument68 pagesAutomation and PLC LAB FileAyush NegiNo ratings yet
- Measurements and Instrumentation Unit 1Document62 pagesMeasurements and Instrumentation Unit 1Patel DipenNo ratings yet
- Chapter 2 - Part 1-Amplitude Modulation - v2Document50 pagesChapter 2 - Part 1-Amplitude Modulation - v2Vijay Papi Reddy Allam100% (1)
- 50+ Instrumentation Interview Questions: #1 January 10, 2020, 4:10pmDocument14 pages50+ Instrumentation Interview Questions: #1 January 10, 2020, 4:10pmkrishna kumarNo ratings yet
- Digital Multimeter Safety TipsDocument19 pagesDigital Multimeter Safety TipsAziz Jamali TalharNo ratings yet
- An Introduction To Transducers and InstrumentationDocument372 pagesAn Introduction To Transducers and Instrumentationanon_531580042100% (1)
- CT111 Introduction To Communication Systems Course OutlineDocument3 pagesCT111 Introduction To Communication Systems Course Outlinewarrior_saurabh100% (1)
- Interfacing Techniques Topic 4Document23 pagesInterfacing Techniques Topic 4Jovel Jhon OpianaNo ratings yet
- CH&NW LabDocument18 pagesCH&NW LabNavaRatnamNo ratings yet
- M& I 2mark Q& ADocument21 pagesM& I 2mark Q& Asathyasony100% (1)
- Electrical Measurement & Instrumentation Course Outline: Text Book / Essential ReadingDocument3 pagesElectrical Measurement & Instrumentation Course Outline: Text Book / Essential Readingzaman_munooNo ratings yet
- ME8501 - Metrology and Measurements - Unit - IDocument30 pagesME8501 - Metrology and Measurements - Unit - Iarunpdc100% (1)
- Managing Service OperationDocument19 pagesManaging Service OperationKlent Joseph N. RojoNo ratings yet
- Concept of Measurement-1Document83 pagesConcept of Measurement-1Pratheesh JpNo ratings yet
- Computer HardwareDocument28 pagesComputer HardwareRonic DakNo ratings yet
- CO - Instrumentation & Control MIT, MANIPALDocument16 pagesCO - Instrumentation & Control MIT, MANIPALashley correaNo ratings yet
- DLD - Ch.1 Notes PDFDocument35 pagesDLD - Ch.1 Notes PDFAlradi Malak FadiNo ratings yet
- Logic AnalyzerDocument27 pagesLogic AnalyzerMohammad Umar RehmanNo ratings yet
- Electro-Hydraulics: Prepared by Approved byDocument51 pagesElectro-Hydraulics: Prepared by Approved byPrakash KumarNo ratings yet
- DC Motor Lecture 3Document27 pagesDC Motor Lecture 3Fira tubeNo ratings yet
- Mechatronics Systems Principles and Fault FindingDocument11 pagesMechatronics Systems Principles and Fault Findingshafra100% (1)
- Introduction To Automatic ControlDocument10 pagesIntroduction To Automatic ControlFatih YıldızNo ratings yet
- Cathode Ray Oscilloscope (CRO)Document16 pagesCathode Ray Oscilloscope (CRO)Naveen SiddineniNo ratings yet
- Electrical Machines and EquipmentDocument76 pagesElectrical Machines and EquipmentsirageldeenNo ratings yet
- CBLM - Assembling - Disassembling Consumer Electronic Products and SystemsDocument186 pagesCBLM - Assembling - Disassembling Consumer Electronic Products and SystemssorcererpcNo ratings yet
- 2 Marks MMDocument5 pages2 Marks MMPappujiNo ratings yet
- Chapter 2 N 43037Document26 pagesChapter 2 N 43037Abi DemNo ratings yet
- Classification and Performance Characteristics of InstrumentsDocument16 pagesClassification and Performance Characteristics of InstrumentsIta SethNo ratings yet
- Instrumentation Chapter 2Document42 pagesInstrumentation Chapter 2Muluken FilmonNo ratings yet
- Static and Dynamic Characteristics of Measuring InstrumentsDocument6 pagesStatic and Dynamic Characteristics of Measuring Instrumentshadeed shaikhNo ratings yet
- Information Communication Technologies (ICT) : Concepts, Implementations and ProspectsDocument2 pagesInformation Communication Technologies (ICT) : Concepts, Implementations and ProspectsRinki KeswaniNo ratings yet
- Instrumentation - Unit 5Document125 pagesInstrumentation - Unit 5Rinki KeswaniNo ratings yet
- ToolStick UniDC UGDocument16 pagesToolStick UniDC UGRinki KeswaniNo ratings yet
- DSKC6713 PDFDocument23 pagesDSKC6713 PDFRinki KeswaniNo ratings yet
- AIAA Design Competition RulesDocument4 pagesAIAA Design Competition RulesArman AsgharpoorNo ratings yet
- Gregorio Zara (Scientist)Document2 pagesGregorio Zara (Scientist)Charina BantilanNo ratings yet
- 2009 Undergraduate ScheduleDocument15 pages2009 Undergraduate Schedulemattyou2007No ratings yet
- Nptel - Iitm.ac - in Courses Webcourse-Contents IIT-ROORKEEDocument2 pagesNptel - Iitm.ac - in Courses Webcourse-Contents IIT-ROORKEEbidyutNo ratings yet
- Analysis of Rates 8Document1 pageAnalysis of Rates 8Aman ThakurNo ratings yet
- Computer Hardware ComponentsDocument8 pagesComputer Hardware ComponentsLink Worx SeoNo ratings yet
- RTS - B.Tech (IT) - 202301 - 015 - S05 - S07 - 00 - 01Document17 pagesRTS - B.Tech (IT) - 202301 - 015 - S05 - S07 - 00 - 01Vijay Kumar YadavNo ratings yet
- Handling Grooming WorkbookDocument8 pagesHandling Grooming Workbookapi-306398192No ratings yet
- A New MTPA Control Strategy For Sensorless V-FDocument5 pagesA New MTPA Control Strategy For Sensorless V-FmmnamaziNo ratings yet
- Loading & Unloading of Fire Fighting Foam 2V-7261 PDFDocument8 pagesLoading & Unloading of Fire Fighting Foam 2V-7261 PDFSanil ThomasNo ratings yet
- Proposed Biophilic Designed Agro-Industiral EstateDocument41 pagesProposed Biophilic Designed Agro-Industiral EstatePK TugadeNo ratings yet
- 1 - The Business Analyst's Handbook - Business CaseDocument4 pages1 - The Business Analyst's Handbook - Business CaseMarc Jason BragatNo ratings yet
- Assignment Business EnglishDocument2 pagesAssignment Business EnglishSheila NoviandaNo ratings yet
- Cathodic ProtectionDocument10 pagesCathodic Protectionmayank dhokeNo ratings yet
- Travel Guide - Chiang Rai and Chiang MaiDocument69 pagesTravel Guide - Chiang Rai and Chiang MaiKalyan ChatterjeaNo ratings yet
- Sabar Midya 2022 Intersecting Knowledge With Landscape Indigenous Agriculture Sustainable Food Production and ResponseDocument19 pagesSabar Midya 2022 Intersecting Knowledge With Landscape Indigenous Agriculture Sustainable Food Production and ResponseKaterina BlackNo ratings yet
- Case Study: (GROUP 5)Document3 pagesCase Study: (GROUP 5)Jay Castro NietoNo ratings yet
- One Way ANOVA Using SPSSDocument23 pagesOne Way ANOVA Using SPSSAngela SantosNo ratings yet
- Science8 - q1 - Mod4 - Effect of Temperature To The Speed of Sound - FINAL07282020Document4 pagesScience8 - q1 - Mod4 - Effect of Temperature To The Speed of Sound - FINAL07282020anna teresa calayagNo ratings yet
- Term Assessments ResultsDocument2 pagesTerm Assessments Resultsj3n9j3n9No ratings yet
- Mega Datasheet Mega Enterprise Architecture enDocument12 pagesMega Datasheet Mega Enterprise Architecture enBunpot ThanaboonsombutNo ratings yet
- Mini Cooper S R53 DTC-P-Codes-Part1Document22 pagesMini Cooper S R53 DTC-P-Codes-Part1rodolfodiaz100% (3)
- A330 MelDocument1,065 pagesA330 MelAbu Tariq ZiadNo ratings yet
- A Unified Theory of Wear For Ultra-High Molecular Weight Polyethylene in Multi-Directional SlidingDocument10 pagesA Unified Theory of Wear For Ultra-High Molecular Weight Polyethylene in Multi-Directional SlidingJosé santanaNo ratings yet
- Class 6 Syllabus 2023 FinalDocument25 pagesClass 6 Syllabus 2023 Finalswetamaz83No ratings yet
- Manova One Powerpoint 1 STATDocument35 pagesManova One Powerpoint 1 STATCherrie Almonte CasumpangNo ratings yet
- Abs Compliance With The Ilo Maritime LabourDocument75 pagesAbs Compliance With The Ilo Maritime LabourSteve MorrisonNo ratings yet
- Abekas Tria Specifications Three Channel APRIL 2014Document2 pagesAbekas Tria Specifications Three Channel APRIL 2014dhargroverNo ratings yet
- RTSys Lecture Note - ch02 A Reference Model For Real-Time Systems PDFDocument28 pagesRTSys Lecture Note - ch02 A Reference Model For Real-Time Systems PDFloknathNo ratings yet
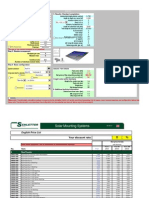
- Autocalculator v. 16.00 i113001ENDocument53 pagesAutocalculator v. 16.00 i113001ENstikss100% (1)