You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- ADCI CS International HandbookDocument254 pagesADCI CS International HandbookMuhammad YusufNo ratings yet
- Lesson Exemplar Math 7Document6 pagesLesson Exemplar Math 7Pablo Jimenea100% (2)
- Rolls-Royce FFCPT BrochureDocument4 pagesRolls-Royce FFCPT Brochuretjsprang100% (1)
- Kunst 1600 Case AnalysisDocument3 pagesKunst 1600 Case AnalysisrakeshNo ratings yet
- Fugro Searcher BrochureDocument2 pagesFugro Searcher BrochuretjsprangNo ratings yet
- Fugro Galaxy BrochureDocument2 pagesFugro Galaxy BrochuretjsprangNo ratings yet
- 17-2014 - Geo-Sense FilterGain Interface UpdatedDocument2 pages17-2014 - Geo-Sense FilterGain Interface UpdatedtjsprangNo ratings yet
- 18-2014 - Geo-Drop Corer No ChangeDocument2 pages18-2014 - Geo-Drop Corer No ChangetjsprangNo ratings yet
- Bibby Topaz 10oct14Document6 pagesBibby Topaz 10oct14tjsprangNo ratings yet
- Lecture 01Document11 pagesLecture 01Hilmi HasaniNo ratings yet
- Geo-Spark 20-40kJDocument2 pagesGeo-Spark 20-40kJtjsprangNo ratings yet
- I.A.-1 Question Bank EM-3 (Answers)Document11 pagesI.A.-1 Question Bank EM-3 (Answers)UmmNo ratings yet
- Learning Plans in The Context of The 21 ST CenturyDocument29 pagesLearning Plans in The Context of The 21 ST CenturyHaidee F. PatalinghugNo ratings yet
- WSI - Catalogue of O-Ring PDFDocument37 pagesWSI - Catalogue of O-Ring PDFyearetg100% (1)
- TR60 RIGID ENG. 6/13/03 10:38 AM Page 1: Performance DataDocument2 pagesTR60 RIGID ENG. 6/13/03 10:38 AM Page 1: Performance Databayu enasoraNo ratings yet
- ToiletsDocument9 pagesToiletsAnonymous ncBe0B9bNo ratings yet
- Empowerment Technology Lesson 4 PDFDocument18 pagesEmpowerment Technology Lesson 4 PDFqueenless eightyoneNo ratings yet
- Mba633 Road To Hell Case AnalysisDocument3 pagesMba633 Road To Hell Case AnalysisAditi VarshneyNo ratings yet
- The Confucian Transformation of Korea: Harvard-Yen Ching Institute Monograph SeriesDocument456 pagesThe Confucian Transformation of Korea: Harvard-Yen Ching Institute Monograph SeriesAnna D.No ratings yet
- Chemical Engineering & Processing: Process Intensi Fication: ArticleinfoDocument9 pagesChemical Engineering & Processing: Process Intensi Fication: Articleinfomiza adlinNo ratings yet
- Dredge Yard Gate Valve BrochureDocument5 pagesDredge Yard Gate Valve BrochureFederico BabichNo ratings yet
- Unit 13 Dialogue Writing: ObjectivesDocument8 pagesUnit 13 Dialogue Writing: ObjectivesAkg GuptNo ratings yet
- HCH - 15 04 004Document5 pagesHCH - 15 04 004NarvaxisNo ratings yet
- Toftejorg TZ-75 Rotary Jet Head - Portable: Fast, Effective Impact CleaningDocument3 pagesToftejorg TZ-75 Rotary Jet Head - Portable: Fast, Effective Impact CleaningSamo SpontanostNo ratings yet
- Design of Footing R1Document8 pagesDesign of Footing R1URVESHKUMAR PATELNo ratings yet
- World Trends in Municipal Solid Waste ManagementDocument11 pagesWorld Trends in Municipal Solid Waste ManagementNeima EndrisNo ratings yet
- Manish Kumar: Desire To Work and Grow in The Field of MechanicalDocument4 pagesManish Kumar: Desire To Work and Grow in The Field of MechanicalMANISHNo ratings yet
- Matsusada DC-DC ConvertersDocument4 pagesMatsusada DC-DC ConvertersAP SinghNo ratings yet
- Contribution of Medieval MuslimDocument16 pagesContribution of Medieval Muslimannur osmanNo ratings yet
- Measures of Indicator 1Document2 pagesMeasures of Indicator 1ROMMEL BALAN CELSONo ratings yet
- Bilateral Transfer of LearningDocument18 pagesBilateral Transfer of Learningts2200419No ratings yet
- Bamboo People - An Interdisciplinary Unit For High SchoolDocument6 pagesBamboo People - An Interdisciplinary Unit For High SchoolChipo Jean MarundaNo ratings yet
- KARAKTERISTIK GEOTERMAL SUMUR EKSPLORASI AT-1, LAPANGAN PANAS BUMI ATADEI, KABUPATEN LEMBATA NTT. Kastiman Sitorus Dan Arif Munandar SUBDIT PANAS BUMIDocument7 pagesKARAKTERISTIK GEOTERMAL SUMUR EKSPLORASI AT-1, LAPANGAN PANAS BUMI ATADEI, KABUPATEN LEMBATA NTT. Kastiman Sitorus Dan Arif Munandar SUBDIT PANAS BUMIItTo MakinoNo ratings yet
- Dissertation MA History PeterRyanDocument52 pagesDissertation MA History PeterRyaneNo ratings yet
- Hydrology Report at CH-9+491Document3 pagesHydrology Report at CH-9+491juliyet strucNo ratings yet
- InterviewDocument8 pagesInterviewswapnadip kumbharNo ratings yet
- UntitledDocument5 pagesUntitledapril montejoNo ratings yet
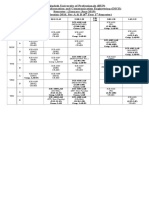
- Class Routine Final 13.12.18Document7 pagesClass Routine Final 13.12.18RakibNo ratings yet
- 2011 Frequency AllocationsDocument1 page2011 Frequency Allocationsculeros1No ratings yet