You might also like
- (1972) Plastic Analysis of Castellated Beams-II. Analysis and TestsDocument30 pages(1972) Plastic Analysis of Castellated Beams-II. Analysis and TestsmikarceNo ratings yet
- 2nd Semester All Courses-100Document194 pages2nd Semester All Courses-100Ejiade PeterNo ratings yet
- Column BaseDocument18 pagesColumn BaseHarsh RajNo ratings yet
- Conjugate Beam Method SLUDocument41 pagesConjugate Beam Method SLULydia D. GalinganNo ratings yet
- Introduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsFrom EverandIntroduction to the Explicit Finite Element Method for Nonlinear Transient DynamicsNo ratings yet
- CCNY LabManualDocument29 pagesCCNY LabManualShady HegazyNo ratings yet
- A Correlation Study of Methods of Matrix Structural Analysis: Report to the 14th Meeting, Structures and Materials Panel Advisory Group for Aeronautical Research and Development, NATO, Paris, France, July 6, 1962From EverandA Correlation Study of Methods of Matrix Structural Analysis: Report to the 14th Meeting, Structures and Materials Panel Advisory Group for Aeronautical Research and Development, NATO, Paris, France, July 6, 1962Rating: 5 out of 5 stars5/5 (1)
- Shear Wall Design PDFDocument13 pagesShear Wall Design PDFRashed100% (3)
- Apco Air Release Valves Arv Arv Air Release Valves Sales 600Document4 pagesApco Air Release Valves Arv Arv Air Release Valves Sales 600RashedNo ratings yet
- Beams Subjected To Torsion and Bending - I: I + I + I) - Here IDocument18 pagesBeams Subjected To Torsion and Bending - I: I + I + I) - Here Isagar1503No ratings yet
- Analytical Solutions in Elasto-Plastic Bending of Beams With PDFDocument12 pagesAnalytical Solutions in Elasto-Plastic Bending of Beams With PDFMariusz Milewski50% (2)
- Plastic Collapse of A Portal Frame: BendingDocument4 pagesPlastic Collapse of A Portal Frame: BendingPontius Pilato100% (1)
- Sizing Calculations RW CW HD ADDocument27 pagesSizing Calculations RW CW HD ADBhavesh Panchal100% (1)
- Hoang - On The Conceptual Basis of The Crack Sliding TheoryDocument54 pagesHoang - On The Conceptual Basis of The Crack Sliding TheoryLarsNo ratings yet
- Immediate Deflection in Concrete BeamsDocument11 pagesImmediate Deflection in Concrete BeamsSeifeldin Ali MarzoukNo ratings yet
- QMSDM Part2 Solutions 8 13Document75 pagesQMSDM Part2 Solutions 8 13Kelly WeermanNo ratings yet
- Plastic AnalysisDocument37 pagesPlastic AnalysisChan Keng ChunNo ratings yet
- Ami-003 WPSDocument2 pagesAmi-003 WPSBenjamin BrownNo ratings yet
- Stranalysis SD METHODDocument78 pagesStranalysis SD METHODNaveen RevannaNo ratings yet
- Surrey ENGM030 Unit 2 NoteDocument29 pagesSurrey ENGM030 Unit 2 NotePhilip YapNo ratings yet
- 08 09 14 Fluid MechanicsDocument1 page08 09 14 Fluid MechanicsManuelito ZapataNo ratings yet
- Synthesis of Ethylbenzene by Alkylation of Benzene With Diethyl Oxalate Over HZSM-5Document6 pagesSynthesis of Ethylbenzene by Alkylation of Benzene With Diethyl Oxalate Over HZSM-5manuel salazarNo ratings yet
- Finite Element MethodsDocument14 pagesFinite Element MethodspriyaankNo ratings yet
- Plastic Bending of Portals-MIET1071-2012Document13 pagesPlastic Bending of Portals-MIET1071-2012James WrightNo ratings yet
- Modeling SCB Frames Using Beam-Column Elements: January 2013Document28 pagesModeling SCB Frames Using Beam-Column Elements: January 2013Maha Moddather Hassan100% (1)
- Microsoft Word - Concrete Lab Handout 2011-12Document8 pagesMicrosoft Word - Concrete Lab Handout 2011-12Yaasiin OozeerNo ratings yet
- HallDocument30 pagesHallMuhammad Faheem100% (1)
- Finite Difference Buckling Analysis of Non Uniform ColumnsDocument8 pagesFinite Difference Buckling Analysis of Non Uniform ColumnsJules NanaNo ratings yet
- Portal FrameDocument7 pagesPortal FrameMuhammad Hasrul HasnanNo ratings yet
- Beams On Elastic FoundationDocument20 pagesBeams On Elastic FoundationShashi Bhushan KumarNo ratings yet
- Conjugate Beam METHODDocument13 pagesConjugate Beam METHODAdam Ahmed100% (1)
- Final Term Paper SubmissionDocument5 pagesFinal Term Paper SubmissionKandousi YassineNo ratings yet
- Compatibility TorsionDocument11 pagesCompatibility TorsionNeil DuldulaoNo ratings yet
- Advanced Structural Mechanics (CSE 20204) Lecture 3: OutlineDocument8 pagesAdvanced Structural Mechanics (CSE 20204) Lecture 3: OutlineYUK LAM WONGNo ratings yet
- Deflection of BeamDocument52 pagesDeflection of BeamAh Shen50% (2)
- Chapter 2 STR 4 Torsion in BeamsDocument17 pagesChapter 2 STR 4 Torsion in BeamsAbera MamoNo ratings yet
- Theory of Elasticity: Exam Problems and Answers Lecture CT5141 (Previously B16)Document96 pagesTheory of Elasticity: Exam Problems and Answers Lecture CT5141 (Previously B16)Ashebir AsratNo ratings yet
- Beam On Elastic FoundationDocument8 pagesBeam On Elastic Foundationgorakdias50% (2)
- L-6 Moment Area Method Part-1Document17 pagesL-6 Moment Area Method Part-1shammi mouryaNo ratings yet
- Mechanics SolutionDocument312 pagesMechanics SolutionManon VerhoevenNo ratings yet
- Chapter 2 - Classification of Cross-SectionDocument20 pagesChapter 2 - Classification of Cross-SectionMuhd Zuhairi100% (2)
- Structural Analysis II Syllabus 20101 2Document17 pagesStructural Analysis II Syllabus 20101 2Christian Nicolaus MbiseNo ratings yet
- Chapter One Wind Load Analysis and Design 1.1 Wind ForcesDocument13 pagesChapter One Wind Load Analysis and Design 1.1 Wind ForcesYalem MesfinNo ratings yet
- 100000Document76 pages100000Dandu ManNo ratings yet
- Lecture-Three Moment TheoremDocument17 pagesLecture-Three Moment TheoremIMJ JNo ratings yet
- Plastic Yield LodeDocument9 pagesPlastic Yield LodesengozkNo ratings yet
- CE6102 - 5 - Application of Newton Raphson Techniques To Elasto-Plastic Model With Constant Yield SurfacesDocument9 pagesCE6102 - 5 - Application of Newton Raphson Techniques To Elasto-Plastic Model With Constant Yield SurfacesandreashendiNo ratings yet
- A Monte Carlo Simulation Method For System Reliability PDFDocument9 pagesA Monte Carlo Simulation Method For System Reliability PDFNaresh NarineNo ratings yet
- Deflection of BeamsDocument28 pagesDeflection of BeamsishwaryaNo ratings yet
- Two Way Slab DesignDocument16 pagesTwo Way Slab DesignMandar NadgaundiNo ratings yet
- FEM - 8 Stiffness MatrixDocument26 pagesFEM - 8 Stiffness Matrixwiyorejesend22u.infoNo ratings yet
- Grillage Analysis of Composite Concrete Slab On Steel Beams With Partial InteractionDocument20 pagesGrillage Analysis of Composite Concrete Slab On Steel Beams With Partial InteractionPham Song HongNo ratings yet
- Analysis and Design of Two Span Continuous Prestressed BeamDocument6 pagesAnalysis and Design of Two Span Continuous Prestressed Beamgokul mgkNo ratings yet
- Beam DeflectionDocument14 pagesBeam DeflectionPrudvi Krishna MaladiNo ratings yet
- Two Hinged Parabolic ArchDocument10 pagesTwo Hinged Parabolic ArchHans Izairi100% (1)
- Memo STRUCTURAL ANALYSIS II - SAN2601 Assignments 2020Document28 pagesMemo STRUCTURAL ANALYSIS II - SAN2601 Assignments 2020Rachel Du PreezNo ratings yet
- Plastic Behaviour of Beams and FramesDocument26 pagesPlastic Behaviour of Beams and FramesTom WilkinsonNo ratings yet
- Chapter 5Document61 pagesChapter 5abdu yimerNo ratings yet
- Introduction To Beams: Part ADocument49 pagesIntroduction To Beams: Part AMorad AJNo ratings yet
- Moment of Inertia LectureDocument26 pagesMoment of Inertia LectureMohdmuslim AbdkohaNo ratings yet
- Advanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasDocument34 pagesAdvanced Structural Analysis Prof. Devdas Menon Department of Civil Engineering Indian Institute of Technology, MadrasGirish ReddyNo ratings yet
- Matrix Structure Analysis Mtech Paper 1Document2 pagesMatrix Structure Analysis Mtech Paper 1Bipul Prince BarmanNo ratings yet
- Computers and Structures: Hamdolah Behnam, J.S. Kuang, Bijan SamaliDocument17 pagesComputers and Structures: Hamdolah Behnam, J.S. Kuang, Bijan SamaliSayna KellenyNo ratings yet
- 4.2 Continuous Load Path: 4.3 Overall FormDocument10 pages4.2 Continuous Load Path: 4.3 Overall FormSirajMalikNo ratings yet
- Important RCC Questions-Short and LongDocument15 pagesImportant RCC Questions-Short and LongmailjoelsamuelNo ratings yet
- Advanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionFrom EverandAdvanced Opensees Algorithms, Volume 1: Probability Analysis Of High Pier Cable-Stayed Bridge Under Multiple-Support Excitations, And LiquefactionNo ratings yet
- 4.2.1 Element Stiffness of A 3 Node Truss Member: Ux X X XDocument8 pages4.2.1 Element Stiffness of A 3 Node Truss Member: Ux X X Xsrinadh1602No ratings yet
- Naptel BeamDocument7 pagesNaptel BeamVenkata DineshNo ratings yet
- PE100 Pressure Pipe DimensionsDocument1 pagePE100 Pressure Pipe DimensionsRashedNo ratings yet
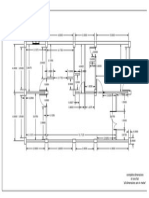
- Complete Dimensions of One Flat 'All Dimensions Are in Meter'Document1 pageComplete Dimensions of One Flat 'All Dimensions Are in Meter'RashedNo ratings yet
- Advanced Structure Analysis PDFDocument41 pagesAdvanced Structure Analysis PDFRashedNo ratings yet
- Caloric Theory of HeatDocument25 pagesCaloric Theory of HeatJeffReyT.AusanNo ratings yet
- Definition, Formulation of D. E. of Ist Order and Ist DegDocument17 pagesDefinition, Formulation of D. E. of Ist Order and Ist DegSourabhThakurNo ratings yet
- Brunauer, Emmett, TellerDocument3 pagesBrunauer, Emmett, TellerResti Puteri UtamiNo ratings yet
- Simulating Physics With ComputersDocument48 pagesSimulating Physics With Computersmib_ajayNo ratings yet
- Additional Equilibrium Problems 2Document10 pagesAdditional Equilibrium Problems 2Lai LeNo ratings yet
- Physics 323 Term Project Fall 2017Document3 pagesPhysics 323 Term Project Fall 2017petermcleod117No ratings yet
- Hidden DimensionsDocument10 pagesHidden DimensionsAntti HukkanenNo ratings yet
- Application of Newton's Second Law: Challenge Problems Problem 1: Painter On A PlatformDocument9 pagesApplication of Newton's Second Law: Challenge Problems Problem 1: Painter On A PlatformBoldie LutwigNo ratings yet
- K EpsilonDocument39 pagesK EpsilonRahul AroraNo ratings yet
- Chemistry Test 11 Chap 1-5Document2 pagesChemistry Test 11 Chap 1-5Sabitra RudraNo ratings yet
- Unsteady Flow of A Viscous Fluid Over Plane Wall: Erdo An, MDocument8 pagesUnsteady Flow of A Viscous Fluid Over Plane Wall: Erdo An, MSrinivas JangiliNo ratings yet
- RIT Design RecommendationsDocument9 pagesRIT Design RecommendationsРуслан РахимовNo ratings yet
- Mech236 - 5pdfs PDFDocument127 pagesMech236 - 5pdfs PDFFab3K FbkNo ratings yet
- Position Vectors & Force Vectors: Today's ObjectivesDocument15 pagesPosition Vectors & Force Vectors: Today's ObjectivesAtef NazNo ratings yet
- Chapter 2 - Fluid Pressure Concept & MeasurementDocument40 pagesChapter 2 - Fluid Pressure Concept & MeasurementfarismuizzNo ratings yet
- Turbulent Flow Between Two Parallel PlatesDocument7 pagesTurbulent Flow Between Two Parallel PlatesAnmol KumarNo ratings yet
- Compressive Strength Is The Capacity of A Material or Structure ToDocument5 pagesCompressive Strength Is The Capacity of A Material or Structure ToMarie Fe BermidoNo ratings yet
- Manual SwitchgearDocument48 pagesManual SwitchgearVinícius MartinsNo ratings yet
- Chapter 12 Electrostatics CheckedDocument21 pagesChapter 12 Electrostatics CheckedGOH JIALE MoeNo ratings yet
- Question Bank BSPH351Document10 pagesQuestion Bank BSPH351buntysharma8218No ratings yet
- Quantum Theory and The Electronic Structure of AtomsDocument58 pagesQuantum Theory and The Electronic Structure of AtomsAsudeNo ratings yet
- FSC Part 2 Physics Numerical Chapter 12 PDFDocument22 pagesFSC Part 2 Physics Numerical Chapter 12 PDFAnaya ZainabNo ratings yet
- Erni-Mineralogy Simplified 1885Document442 pagesErni-Mineralogy Simplified 1885RonLaytonNo ratings yet