You might also like
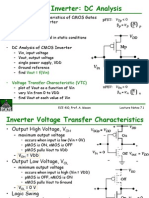
- CMOS Inverter: DC AnalysisDocument32 pagesCMOS Inverter: DC Analysissreekanthreddy peram50% (2)
- FormulaDocument7 pagesFormulaMàddìRèxxShìrshírNo ratings yet
- Question BankDocument11 pagesQuestion BankRohini MukunthanNo ratings yet
- Father of Admission Test 2nd Edition JU PMSCS VersionDocument215 pagesFather of Admission Test 2nd Edition JU PMSCS VersionMd. Hasibul HasanNo ratings yet
- Motor Starter NordDocument36 pagesMotor Starter NordEuojrNo ratings yet
- Dynamical Systems: An LTCC CourseDocument53 pagesDynamical Systems: An LTCC CourseRoy VeseyNo ratings yet
- Medidas Eroelectronic PDFDocument4 pagesMedidas Eroelectronic PDFJuan Diego CondeNo ratings yet
- RTD BasicsDocument5 pagesRTD BasicsMourougapragash SubramanianNo ratings yet
- Cad Commands LibraryDocument11 pagesCad Commands LibraryAvdija HamzićNo ratings yet
- Rectifier and FiltersDocument36 pagesRectifier and FiltersPankaj SinghNo ratings yet
- Tempsens Handbook PDFDocument180 pagesTempsens Handbook PDFKristijan CudarNo ratings yet
- Full-Wave Rectifier - VerstudDocument26 pagesFull-Wave Rectifier - VerstudLIEW HUI FANG UNIMAPNo ratings yet
- Quartus II Introduction-VHDLDocument38 pagesQuartus II Introduction-VHDLMarc FilbàNo ratings yet
- Characteristics of ThermocoupleDocument6 pagesCharacteristics of ThermocouplekusumgdasNo ratings yet
- Multivariate Random VariablesDocument29 pagesMultivariate Random VariablesEdmond ZNo ratings yet
- Ats22 User Manual en Bbv51330 04Document85 pagesAts22 User Manual en Bbv51330 04Luis RolaNo ratings yet
- MATH 223 Advanced Engineering Mathematics W9 To W13 PDFDocument54 pagesMATH 223 Advanced Engineering Mathematics W9 To W13 PDFGreen zolarNo ratings yet
- Mauro Giuliani Sonata EroicaDocument10 pagesMauro Giuliani Sonata Eroicaadoboguitar70% (10)
- Simulation of Phase Controlled Rectifiers UsingDocument10 pagesSimulation of Phase Controlled Rectifiers UsinggubiliNo ratings yet
- Foreign Language Anxiety and Students' Learning Motivation For Filipino Foreign Language (Korean) LearnersDocument13 pagesForeign Language Anxiety and Students' Learning Motivation For Filipino Foreign Language (Korean) LearnersIOER International Multidisciplinary Research Journal ( IIMRJ)No ratings yet
- Probability & Random Variable Cheat SheetDocument2 pagesProbability & Random Variable Cheat SheetadkinsblNo ratings yet
- Coordination Tables: 1SDC007004D0205Document98 pagesCoordination Tables: 1SDC007004D0205HoangNo ratings yet
- Equal Area Criterion 1.0 Development of Equal Area CriterionDocument33 pagesEqual Area Criterion 1.0 Development of Equal Area Criterionscrib_111No ratings yet
- Brief Notes On Signals and Systems 7.2Document77 pagesBrief Notes On Signals and Systems 7.2Bhaskar Rao GopisettiNo ratings yet
- Lec.10 ABCD ParametersDocument12 pagesLec.10 ABCD ParametersSyed Wahaj Ul HaqNo ratings yet
- Holtz Kovacs An Introduction To Geotechnical EngineeringDocument16 pagesHoltz Kovacs An Introduction To Geotechnical EngineeringNatalia Gomez Montoya0% (2)
- Solved Question Papers For Gate Mechanical EngineeringDocument16 pagesSolved Question Papers For Gate Mechanical EngineeringAsaduz ZamanNo ratings yet
- Formula PQTDocument13 pagesFormula PQTசிவக்குமார் ஈஸ்வரன்No ratings yet
- 308manual 5 03Document57 pages308manual 5 03basileiouspyrosNo ratings yet
- Power Electronics PPT by DeveshDocument34 pagesPower Electronics PPT by Deveshshadan alamNo ratings yet
- R.A. Thisted - Elements of Statistical Computing - Numerical Computation-Routledge (1988)Document456 pagesR.A. Thisted - Elements of Statistical Computing - Numerical Computation-Routledge (1988)Rose Nascimento100% (1)
- MATH 2170: Table of Derivatives and IntegralsDocument5 pagesMATH 2170: Table of Derivatives and IntegralsspacejuyNo ratings yet
- Spin Art BLADDocument8 pagesSpin Art BLADInterweave0% (1)
- PLC Dan LadderDocument33 pagesPLC Dan LadderwinoNo ratings yet
- UEP - PPT - Elec. Heating PDFDocument117 pagesUEP - PPT - Elec. Heating PDFANUSHA SINGH V HNo ratings yet
- The Primordial Density Perturbation - David H. Lyth and Andrew R. LiddleDocument517 pagesThe Primordial Density Perturbation - David H. Lyth and Andrew R. LiddleDarwin de la CruzNo ratings yet
- Point Estimation: Definition of EstimatorsDocument8 pagesPoint Estimation: Definition of EstimatorsUshnish MisraNo ratings yet
- Introduction To Random Processes Handouts PDFDocument116 pagesIntroduction To Random Processes Handouts PDFshaan76No ratings yet
- Homework 1Document8 pagesHomework 1Yooncheul JeungNo ratings yet
- Lect 17 - Performance Parameters of Rectifier CircuitsDocument40 pagesLect 17 - Performance Parameters of Rectifier CircuitsShumaila AltafNo ratings yet
- RZ1-K Power CableDocument5 pagesRZ1-K Power CablegarysNo ratings yet
- Digital Signal Processing NotesDocument12 pagesDigital Signal Processing NotesDanial ZamanNo ratings yet
- 05 Convolution of CT and DTDocument63 pages05 Convolution of CT and DTBhaskarNo ratings yet
- Digital Signal ProcessingDocument7 pagesDigital Signal Processingind sh1No ratings yet
- 09 04 Second Order Derivatives PDFDocument19 pages09 04 Second Order Derivatives PDFSri DNo ratings yet
- Half Wave Rectifiers With Resistive and Inductive LoadDocument5 pagesHalf Wave Rectifiers With Resistive and Inductive Loadluqman059No ratings yet
- 3Document44 pages3Karthik Kumar KothamasuNo ratings yet
- Two Port Networks PPT 1 B TECH 3RDDocument32 pagesTwo Port Networks PPT 1 B TECH 3RDEuthecas KipkiruiNo ratings yet
- Data Sheet: Diesel Generator 1500Kw 50HZ/1500RPM PERKINS MODEL: 4012-46TAG3ADocument9 pagesData Sheet: Diesel Generator 1500Kw 50HZ/1500RPM PERKINS MODEL: 4012-46TAG3AmualiminNo ratings yet
- PRP NotesDocument10 pagesPRP NotesBharath JojoNo ratings yet
- Power System Protection Masterclass - FacilitatorDocument3 pagesPower System Protection Masterclass - FacilitatorVicNo ratings yet
- 2 - 3 - 4-Wire RTD MeasurementDocument9 pages2 - 3 - 4-Wire RTD MeasurementtotovasiNo ratings yet
- Electroquasistatic (EQS) and Magnetoquasistatic (MQS) Fields and Boundary ConditionsDocument12 pagesElectroquasistatic (EQS) and Magnetoquasistatic (MQS) Fields and Boundary ConditionsratansrikanthNo ratings yet
- Introduction To Electrical Circuit Design: Instructor Manual 2015Document10 pagesIntroduction To Electrical Circuit Design: Instructor Manual 2015arturo tuñoque effioNo ratings yet
- Average Values & Effective ValuesDocument11 pagesAverage Values & Effective ValuesDravid NagiNo ratings yet
- Chapter 15Document40 pagesChapter 15ovidiu_blnNo ratings yet
- AC FundamentalsDocument21 pagesAC FundamentalsSaikrishnaNo ratings yet
- Amp Capacity of Copper BusDocument1 pageAmp Capacity of Copper BusVIKRAM DESAINo ratings yet
- Z TransformDocument21 pagesZ Transformadil1122100% (3)
- Beta and Gamma FunctionsDocument32 pagesBeta and Gamma FunctionsSa'ad Abd Ar RafieNo ratings yet
- Method of MomentsDocument4 pagesMethod of MomentsladyfairynaNo ratings yet
- Physics 127b: Statistical Mechanics Brownian Motion: Random WalkDocument7 pagesPhysics 127b: Statistical Mechanics Brownian Motion: Random WalkPriyank BangarNo ratings yet
- Mme PDFDocument9 pagesMme PDFHöîkí YöñNo ratings yet
- WorkedExample CauchyDocument3 pagesWorkedExample CauchyMuhammad Taurif RasyidinNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- LAPC 2017 CertificateDocument2 pagesLAPC 2017 CertificateZeeshan AhmedNo ratings yet
- ESoA2017 Course TimetableDocument2 pagesESoA2017 Course TimetableZeeshan AhmedNo ratings yet
- Danish GradesDocument4 pagesDanish GradesZeeshan AhmedNo ratings yet
- 19 - 01189650 - 5 An Overview of Fractal Antenna Engineering ResearchDocument22 pages19 - 01189650 - 5 An Overview of Fractal Antenna Engineering ResearchZeeshan Ahmed100% (1)
- 9 - 06711979 A Novel UWB CircularDocument4 pages9 - 06711979 A Novel UWB CircularZeeshan AhmedNo ratings yet
- PQT-Module - 2-Lecture NotesDocument24 pagesPQT-Module - 2-Lecture NotesDEEPANSHU LAMBA (RA2111003011239)No ratings yet
- Progress in Natural Laminar Flow Wing DesignDocument15 pagesProgress in Natural Laminar Flow Wing Designjunjie yiNo ratings yet
- PIGMENTS Mbbs - Dr. SuchitaDocument53 pagesPIGMENTS Mbbs - Dr. SuchitaRushi VaghelaNo ratings yet
- 4825D PDFDocument5 pages4825D PDFaldo_suvi100% (1)
- Linq NotesDocument8 pagesLinq NotesPankaj HaldikarNo ratings yet
- Group 1 (Alkali Metals) - Lithium, Sodium, Potassium QPDocument8 pagesGroup 1 (Alkali Metals) - Lithium, Sodium, Potassium QPRODGERS BANDANo ratings yet
- Ob 2269Document11 pagesOb 2269Fikri HidayatNo ratings yet
- LUMISOLAR Ficha Técnica Batería AGM Sellada 100ah 12V (Mod. KBL121000)Document2 pagesLUMISOLAR Ficha Técnica Batería AGM Sellada 100ah 12V (Mod. KBL121000)sedapargoNo ratings yet
- I Jcs It 2015060141Document5 pagesI Jcs It 2015060141SunilAjmeeraNo ratings yet
- Manual New PDFDocument58 pagesManual New PDFKumar SauravNo ratings yet
- High Voltage Power SupplyDocument2 pagesHigh Voltage Power SupplyLeonardoMartinNo ratings yet
- Performance Comparison of AODV, AODV-ETX and Modified AODV-ETXDocument8 pagesPerformance Comparison of AODV, AODV-ETX and Modified AODV-ETXHasan MufticNo ratings yet
- Gemini-BPM500 PreampDocument12 pagesGemini-BPM500 PreampAristoteles CarreñoNo ratings yet
- Presence of Oxalative Ions in Guava-Converted LololololDocument11 pagesPresence of Oxalative Ions in Guava-Converted LololololAnime SenseiNo ratings yet
- Restore Failed For SQL ServerDocument1 pageRestore Failed For SQL ServerAndri van der DoelenNo ratings yet
- Tinajeros National High SchoolDocument2 pagesTinajeros National High SchoolJoshua PorcadillaNo ratings yet
- Carbon Nanotube: Properties and ApplicationsDocument22 pagesCarbon Nanotube: Properties and ApplicationsmanuNo ratings yet
- Dbms Lab Plan 2022-23-SeDocument6 pagesDbms Lab Plan 2022-23-Se41 Aanchal dayaramaniNo ratings yet
- Method 1 (md5, Sha256, Sha512)Document3 pagesMethod 1 (md5, Sha256, Sha512)HOD-DIT PSG-PTCNo ratings yet
- Nature 24647Document15 pagesNature 24647Nicholas SmithNo ratings yet
- TransferCFT InstallationGuide Windows enDocument203 pagesTransferCFT InstallationGuide Windows enMoussa GbanetNo ratings yet
- Service: ManualDocument30 pagesService: ManualFlorian LeordeanuNo ratings yet
- 21 Sep Evening Paper HSSC Clerk 5 2019 PDFDocument13 pages21 Sep Evening Paper HSSC Clerk 5 2019 PDFManjeet DuggalNo ratings yet
- 05 Time Response AnalysisDocument41 pages05 Time Response AnalysisFadly ShafiqNo ratings yet