You might also like
- An Introduction to Lebesgue Integration and Fourier SeriesFrom EverandAn Introduction to Lebesgue Integration and Fourier SeriesNo ratings yet
- Bioimaging Lab 1 v3Document2 pagesBioimaging Lab 1 v3Henry VelascoNo ratings yet
- Engineering Analysis: Fourier Transform " FT "Document49 pagesEngineering Analysis: Fourier Transform " FT "For SignUpsNo ratings yet
- Fourier Transform ApplicationsDocument29 pagesFourier Transform ApplicationsMauricio MallmaNo ratings yet
- Power Electronics Notes by ArunkumarDocument58 pagesPower Electronics Notes by ArunkumarVishwanath ShervegarNo ratings yet
- Spectral TechniquesDocument42 pagesSpectral TechniquesHIMANI NARAIN HIMANI NARAINNo ratings yet
- Cpe416 - DSP - Laboratory 4Document15 pagesCpe416 - DSP - Laboratory 4gregie284No ratings yet
- OpticsI 13 FourierTransforms IDocument33 pagesOpticsI 13 FourierTransforms Idiogo edlerNo ratings yet
- Lecture 4 Fourier Transform Part-1Document24 pagesLecture 4 Fourier Transform Part-1Anant Krishna DasNo ratings yet
- CS6640 F2014 Fourier I PDFDocument39 pagesCS6640 F2014 Fourier I PDFAya MohmmedNo ratings yet
- CHAPTER ONE OrignalDocument33 pagesCHAPTER ONE Orignalmark okorieNo ratings yet
- Fourier Transform of Coulomb PotentialDocument4 pagesFourier Transform of Coulomb Potentialtutorciecle123No ratings yet
- Lecture Basics of FTDocument35 pagesLecture Basics of FTmnaNo ratings yet
- Chapter 5Document49 pagesChapter 5SunnyNo ratings yet
- Fourier TransformDocument77 pagesFourier Transformtextile.km98No ratings yet
- Dip 3Document106 pagesDip 3DEVID ROYNo ratings yet
- PHY431 Slides FourierTransforms OptionalReviewDocument40 pagesPHY431 Slides FourierTransforms OptionalReviewjais yesudasNo ratings yet
- Calculus Iii: CHAPTER 6: Short Introduction To Fourier SeriesDocument17 pagesCalculus Iii: CHAPTER 6: Short Introduction To Fourier SeriesRoy VeseyNo ratings yet
- Image Enhance Frequency Domain StudentDocument21 pagesImage Enhance Frequency Domain StudentShrijeet JainNo ratings yet
- EA201MM2 03a Trigo-Series ReviewDocument52 pagesEA201MM2 03a Trigo-Series ReviewSeanNo ratings yet
- Fourier 4Document73 pagesFourier 4Duaa HusseinNo ratings yet
- Comparing Hermit Transform and Wavelet Transform Applied On Image RepresentationDocument8 pagesComparing Hermit Transform and Wavelet Transform Applied On Image RepresentationIgor ČarapićNo ratings yet
- Problems Based Exponential and Trigonometric Fourier Series and Its ApplicationsDocument9 pagesProblems Based Exponential and Trigonometric Fourier Series and Its ApplicationsKhushbu ThakurNo ratings yet
- U2 Fourier TransformDocument75 pagesU2 Fourier TransformThalía LuceroNo ratings yet
- Optics15 Geometrical Optics IDocument29 pagesOptics15 Geometrical Optics Ighanasyam970No ratings yet
- Lecture 4Document29 pagesLecture 4bedline.salesNo ratings yet
- Fourier Transforms Rick TrebinoDocument41 pagesFourier Transforms Rick Trebinotomas_de_kempisNo ratings yet
- Iffat Anjum Roll: Rk-554 MSC 1 Semester: Presented byDocument15 pagesIffat Anjum Roll: Rk-554 MSC 1 Semester: Presented byNikhil Arun KumarNo ratings yet
- Eng4Bf3 Medical Image Processing: Image Enhancement in Frequency DomainDocument59 pagesEng4Bf3 Medical Image Processing: Image Enhancement in Frequency DomainparkumarNo ratings yet
- 23 2 RPRSNT Periodc Funcn Fourr Series PDFDocument21 pages23 2 RPRSNT Periodc Funcn Fourr Series PDFPanji Langgeng SatrioNo ratings yet
- Fourier Transform: Naveen SihagDocument54 pagesFourier Transform: Naveen SihagDr. M. Karthigai Pandian Asso Prof ICENo ratings yet
- Fourier Series & The Fourier TransformDocument29 pagesFourier Series & The Fourier TransformchalchisadeguNo ratings yet
- Fourier SeriesDocument16 pagesFourier Seriesvolly666No ratings yet
- Fourier OpticsDocument28 pagesFourier OpticsVandana SharmaNo ratings yet
- Digital Image Processing: Image Enhancement: Filtering in The Frequency DomainDocument81 pagesDigital Image Processing: Image Enhancement: Filtering in The Frequency DomainAseem SharmaNo ratings yet
- L-11 (Digital ImageProcessing-Image Enhancement in Frequency Domain)Document69 pagesL-11 (Digital ImageProcessing-Image Enhancement in Frequency Domain)career Point BastiNo ratings yet
- ObjectiveDocument6 pagesObjectiveNasir Ali / Lab Engineer, Electrical Engineering DepartmentNo ratings yet
- Fourier Transform WikiDocument24 pagesFourier Transform Wikibraulio.dantasNo ratings yet
- Image Processing-Ch4 - Part 1Document63 pagesImage Processing-Ch4 - Part 1saifNo ratings yet
- Assignment of Signal and System: Submitted byDocument12 pagesAssignment of Signal and System: Submitted bynaeem444454No ratings yet
- Fourier TransformDocument29 pagesFourier TransformAlok PradhanNo ratings yet
- Application of Fourier TransformationDocument26 pagesApplication of Fourier TransformationVijay JamesNo ratings yet
- Digital Image Processing (Chapter 4)Document62 pagesDigital Image Processing (Chapter 4)Md.Nazmul Abdal Shourov100% (1)
- Seismograms - Eigenmodes of The Earth - Time Derivatives of Seismograms - The Pseudo-Spectral Method For Acoustic Wave PropagationDocument29 pagesSeismograms - Eigenmodes of The Earth - Time Derivatives of Seismograms - The Pseudo-Spectral Method For Acoustic Wave PropagationricetNo ratings yet
- The Fast Fourier Transform DemystifiedDocument4 pagesThe Fast Fourier Transform DemystifiedAndy2102No ratings yet
- Image Enhancement in Frequency DomainDocument16 pagesImage Enhancement in Frequency DomainMahreenNo ratings yet
- Chap 4.2 Fourier TransformDocument3 pagesChap 4.2 Fourier TransformVĩnh PhongNo ratings yet
- IEEE Paper Format New-Technical Paper Repaired)Document8 pagesIEEE Paper Format New-Technical Paper Repaired)Faris AhmadNo ratings yet
- Fourier Transform CollectionDocument21 pagesFourier Transform CollectioncostpopNo ratings yet
- Bahria University Karachi Campus: Properties of Fourier TransformDocument7 pagesBahria University Karachi Campus: Properties of Fourier Transformvaneeza ahmedNo ratings yet
- Descripción Uso de La Transformada de FourierDocument5 pagesDescripción Uso de La Transformada de Fourierfrancisco.buitragoNo ratings yet
- Slides-FIR Linear Phase Systems MITRADocument8 pagesSlides-FIR Linear Phase Systems MITRAcoolboy_usamaNo ratings yet
- Kernel Adaptive Filtering PDFDocument124 pagesKernel Adaptive Filtering PDFgeorgez111No ratings yet
- Fourier Transform TheoryDocument8 pagesFourier Transform TheoryJeffreyBeridaNo ratings yet
- Gogte Institute of Technology: (An Autonomous Institution Under Visveswaraya Technological University, Belagavi)Document13 pagesGogte Institute of Technology: (An Autonomous Institution Under Visveswaraya Technological University, Belagavi)manjunath koraddiNo ratings yet
- A Course of Mathematics for Engineerings and Scientists: Volume 5From EverandA Course of Mathematics for Engineerings and Scientists: Volume 5No ratings yet
- Continuous Random Variables - Maths A-Level RevisionDocument4 pagesContinuous Random Variables - Maths A-Level RevisionHanif MohammadNo ratings yet
- Continuous Random Variables: Probability Density Function PDFDocument13 pagesContinuous Random Variables: Probability Density Function PDFHanif MohammadNo ratings yet
- Glasnik Matemati CKI Vol. 53 (73) (2018), 51 - 71: Key Words and PhrasesDocument21 pagesGlasnik Matemati CKI Vol. 53 (73) (2018), 51 - 71: Key Words and PhrasesHanif MohammadNo ratings yet
- Recursive Gabor FilteringDocument4 pagesRecursive Gabor FilteringHanif MohammadNo ratings yet
- Powerware 5110 UPS User's ManualDocument14 pagesPowerware 5110 UPS User's ManualjulbfuNo ratings yet
- 1010 Tire ChangerDocument4 pages1010 Tire ChangerReyes Cesar33% (3)
- A Review Paper On Effect of Varying Welding Heat Input On Microstructure, Mech Properties and Corrosion Behaviors of Ferritic SS & Mild Steel PDFDocument5 pagesA Review Paper On Effect of Varying Welding Heat Input On Microstructure, Mech Properties and Corrosion Behaviors of Ferritic SS & Mild Steel PDFMursidil KamilNo ratings yet
- CHCE 3004 CHEG 333 Chemical Reaction Engineering I QP 2020 SUPPLIMENTRY - AM PDFDocument2 pagesCHCE 3004 CHEG 333 Chemical Reaction Engineering I QP 2020 SUPPLIMENTRY - AM PDFLGK KlanNo ratings yet
- LDT9965 Dis WasherDocument70 pagesLDT9965 Dis WasherJosé Airton TirakowskiNo ratings yet
- WPH02 01 Que 20150604Document28 pagesWPH02 01 Que 20150604ArnieNo ratings yet
- Civil Engineering PDFDocument3 pagesCivil Engineering PDFchetan c patilNo ratings yet
- Light Object DSP Controller Setup GuideDocument20 pagesLight Object DSP Controller Setup Guideblondu0070% (1)
- 29L0054805FDocument49 pages29L0054805FszNo ratings yet
- 10SQ050 PDFDocument3 pages10SQ050 PDFprojects eastlinkNo ratings yet
- Add A Thermometer To Your Digital Multimeter - Embedded LabDocument13 pagesAdd A Thermometer To Your Digital Multimeter - Embedded LabGourmand OishiiNo ratings yet
- Tensile Properties of Ground Coffee Waste Reinforced Polyethylene CompositeDocument4 pagesTensile Properties of Ground Coffee Waste Reinforced Polyethylene CompositemhmmdzulvaNo ratings yet
- Karcher K - 791 - MDocument12 pagesKarcher K - 791 - MJoão Paulo FernandesNo ratings yet
- EOT CRANE - Rev 2Document6 pagesEOT CRANE - Rev 2Koushik BhaumikNo ratings yet
- Trouble Codes C32Document10 pagesTrouble Codes C32AliHabes100% (2)
- SY-5SSM V1.1 SY-5SSM/5 V1.1 Super 7 Motherboard: User's Guide & Technical ReferenceDocument88 pagesSY-5SSM V1.1 SY-5SSM/5 V1.1 Super 7 Motherboard: User's Guide & Technical Referencealopezcuervo82190% (1)
- USS ProtocolDocument77 pagesUSS Protocolreza2131No ratings yet
- Hot Water Recirculation PumpsDocument22 pagesHot Water Recirculation Pumpsniaz kilamNo ratings yet
- Gsk980Tda Turning Machine CNC System: CharacteristicsDocument10 pagesGsk980Tda Turning Machine CNC System: CharacteristicsPramod YadavNo ratings yet
- Method Statement of Pipeline WorksDocument13 pagesMethod Statement of Pipeline Worksमनिसभेटुवाल86% (21)
- Mapplet InformaticaDocument3 pagesMapplet InformaticaRamesh Babu BabuNo ratings yet
- Earned Schedule - Walt LipkeDocument27 pagesEarned Schedule - Walt LipkeKatie BensonNo ratings yet
- FD100 CatalogoDocument4 pagesFD100 CatalogoKaren VásconezNo ratings yet
- Thermophysical Properties of Containerless Liquid Iron Up To 2500 KDocument10 pagesThermophysical Properties of Containerless Liquid Iron Up To 2500 KJose Velasquez TeranNo ratings yet
- TK-C Transmitter PDFDocument4 pagesTK-C Transmitter PDFGopal HegdeNo ratings yet
- AÇO - DIN17100 St52-3Document1 pageAÇO - DIN17100 St52-3Paulo Henrique NascimentoNo ratings yet
- CSC 263Document108 pagesCSC 263osecaloNo ratings yet
- Metco 16C 10-040Document8 pagesMetco 16C 10-040JSH100No ratings yet
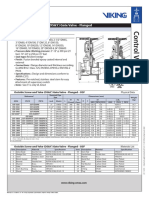
- Outside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesDocument2 pagesOutside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesMark Louie GuintoNo ratings yet
- BX-74 / BX-78: Sliding Gate Operator BX SeriesDocument24 pagesBX-74 / BX-78: Sliding Gate Operator BX SeriesStefce PetrovNo ratings yet