You might also like
- Syntorial NotesDocument13 pagesSyntorial NotesdanNo ratings yet
- Maximising The Saliency Ratio of The Synchronous Reluctance MotorDocument11 pagesMaximising The Saliency Ratio of The Synchronous Reluctance MotormitsuiNo ratings yet
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Kiss Forex How To Trade Ichimoku PDFDocument72 pagesKiss Forex How To Trade Ichimoku PDFSastryassociates Chartered100% (3)
- Hygiene PassportDocument133 pagesHygiene PassportAsanga MalNo ratings yet
- Rubber Lined Piping - A Solution To Corrosion ResistanceDocument5 pagesRubber Lined Piping - A Solution To Corrosion ResistanceMohamed AghilaNo ratings yet
- Application of Permanent Magnet Bias Magnetic Bearings To An Energy Storage FlywheelDocument15 pagesApplication of Permanent Magnet Bias Magnetic Bearings To An Energy Storage FlywheelmivanoNo ratings yet
- Application of Permanent Magnet Bias Magnetic Bearings To An Energy Storage FlywheelDocument15 pagesApplication of Permanent Magnet Bias Magnetic Bearings To An Energy Storage FlywheelcoolcoliNo ratings yet
- ITEC 2022 SunumDocument20 pagesITEC 2022 Sunumufo85No ratings yet
- Design and Shop Testing of A 165KW Cryogenic Expander Generator On Magnetic BearingsDocument6 pagesDesign and Shop Testing of A 165KW Cryogenic Expander Generator On Magnetic BearingsCalnetix TechnologiesNo ratings yet
- Fig 1.1 Axial-Field Electrical MachineDocument26 pagesFig 1.1 Axial-Field Electrical MachineSafalsha BabuNo ratings yet
- Design of Damper To Protect The Field Coil of An HTS Synchronous MotorDocument4 pagesDesign of Damper To Protect The Field Coil of An HTS Synchronous Motorgurunathan14No ratings yet
- 492 FerreiraDocument6 pages492 FerreiraRonald LiemNo ratings yet
- HEBNER R., BENO J., WALLS A., Flywheel Batteries Come Around Again IEEE Spectrum, April 2002, Pp. 46-51. AbstractDocument7 pagesHEBNER R., BENO J., WALLS A., Flywheel Batteries Come Around Again IEEE Spectrum, April 2002, Pp. 46-51. AbstractRachit VemulaNo ratings yet
- Ho2010 Result of RotorDocument4 pagesHo2010 Result of RotorIraqi stormNo ratings yet
- 04 Wheel Axial Flux SRM Drive Light Electric VehiclesDocument8 pages04 Wheel Axial Flux SRM Drive Light Electric VehiclesSek PyroNo ratings yet
- A 300 000-r Min Magnetically Levitated Reaction Wheel DemonstratorDocument4 pagesA 300 000-r Min Magnetically Levitated Reaction Wheel DemonstratorxrovljolscjvmiszchNo ratings yet
- Electromagnetic Aircraft Launch System - EMALS: Naval Air Warfare Center, Aircraft Division, Lakehurst, NJ 08733Document6 pagesElectromagnetic Aircraft Launch System - EMALS: Naval Air Warfare Center, Aircraft Division, Lakehurst, NJ 08733José Manuel AlvaradoNo ratings yet
- On The Modeling and Control of A Novel Flywheel Energy Storage SystemDocument7 pagesOn The Modeling and Control of A Novel Flywheel Energy Storage SystemSantiago Bonilla RiveraNo ratings yet
- Rare-Earth Free Motor With Field Poles Excited by Space HarmonicsDocument6 pagesRare-Earth Free Motor With Field Poles Excited by Space HarmonicsHuong ThaoNo ratings yet
- A Selection of Electrical Machine As An Electromechanical Battery For Earth Orbit SatelliteDocument6 pagesA Selection of Electrical Machine As An Electromechanical Battery For Earth Orbit SatelliteAli DurazNo ratings yet
- Design of A Three-Phase Multistage Axial Flux Permanent Magnet Generator For Wind Turbine ApplicationsDocument19 pagesDesign of A Three-Phase Multistage Axial Flux Permanent Magnet Generator For Wind Turbine ApplicationskaganNo ratings yet
- iNaCoMM 2019 Paper 82Document7 pagesiNaCoMM 2019 Paper 82pavanmisra1No ratings yet
- Unbalanced Magnetic Pull in Cage Induction Motors With Asymmetry in Rotor StructuresDocument5 pagesUnbalanced Magnetic Pull in Cage Induction Motors With Asymmetry in Rotor StructuresRohan ChandrashekarNo ratings yet
- Wevj 05 00533Document8 pagesWevj 05 00533Ashutosh SahuNo ratings yet
- 05 Nucleus PAKDocument5 pages05 Nucleus PAKEngr Muhammad Mansoor AshrafNo ratings yet
- Design of Switched Reluctance Motor: 100 For Electric Vehicle PropulsionDocument5 pagesDesign of Switched Reluctance Motor: 100 For Electric Vehicle Propulsionbalajim1980No ratings yet
- Design and Analysis of A Yasa Type Motor 1Document7 pagesDesign and Analysis of A Yasa Type Motor 1Bhagyesh DeshmukhNo ratings yet
- Seminar Ganesh Kanhekar 2Document34 pagesSeminar Ganesh Kanhekar 2Vilen Pubg GamerNo ratings yet
- A Flywheel Energy Storage System With Active Magnetic BearingsDocument5 pagesA Flywheel Energy Storage System With Active Magnetic Bearingssumesh1980No ratings yet
- Flywheel Energy Storage SystemDocument6 pagesFlywheel Energy Storage SystemImtiaz FiazNo ratings yet
- Overview of CLW: (Chittaranjan Locomotive Works)Document12 pagesOverview of CLW: (Chittaranjan Locomotive Works)Rahul SinhaNo ratings yet
- Design of A 1kW High Speed Axial Flux PeDocument9 pagesDesign of A 1kW High Speed Axial Flux PemanasrinuNo ratings yet
- Space Shuttles and Its Advancements: Re-Entry Capsules Promises To Intensify InternationalDocument19 pagesSpace Shuttles and Its Advancements: Re-Entry Capsules Promises To Intensify InternationalMovidi VenkatvinodNo ratings yet
- Me-De-4060-7522-Suyog GawareDocument5 pagesMe-De-4060-7522-Suyog GawaresarfrajNo ratings yet
- Ismb 7Document6 pagesIsmb 7Kadhigo YusufNo ratings yet
- Effect of Rotor Profiles On The Torque of A Switched ReluctaDocument6 pagesEffect of Rotor Profiles On The Torque of A Switched Reluctaapi-19827661No ratings yet
- Design of A Compact Winding For An Axial-Flux Permanent-Magnet Brushless DC Motor Used in An Electric Two-WheelerDocument3 pagesDesign of A Compact Winding For An Axial-Flux Permanent-Magnet Brushless DC Motor Used in An Electric Two-WheelerhooshyarNo ratings yet
- Shunt Reactor VibrationDocument8 pagesShunt Reactor VibrationmehmeteeeNo ratings yet
- Optimal Design and Control of Axial-Flux Brushless DC Wheel Motor For Electrical VehiclesDocument10 pagesOptimal Design and Control of Axial-Flux Brushless DC Wheel Motor For Electrical Vehiclesfre12345No ratings yet
- 420 430 PDFDocument12 pages420 430 PDFSourav RanaNo ratings yet
- Magnetic Bearings in Kinetic Energy Storage Systems For VehicularDocument12 pagesMagnetic Bearings in Kinetic Energy Storage Systems For Vehicularmahmoud mohamedNo ratings yet
- Eletrical Machines-Iii Lecture Notes Unit-IDocument19 pagesEletrical Machines-Iii Lecture Notes Unit-IDIVYA PRASOONA CNo ratings yet
- Chapter 7 QuestionsDocument8 pagesChapter 7 QuestionsNicole Irene Dela Pena67% (3)
- Unit I Synchronous Reluctance MotorsDocument78 pagesUnit I Synchronous Reluctance MotorsshilpaNo ratings yet
- Prepared by Ap/EeeDocument11 pagesPrepared by Ap/EeeVidhya M PNo ratings yet
- Design and Analysis of A Novel Brushless Wound Rotor Synchronous MachineDocument4 pagesDesign and Analysis of A Novel Brushless Wound Rotor Synchronous MachineHuong ThaoNo ratings yet
- Energy Conversion and Management: G.K. Singh, A. Senthil Kumar, R.P. SainiDocument12 pagesEnergy Conversion and Management: G.K. Singh, A. Senthil Kumar, R.P. Sainideenaraja1990No ratings yet
- Wind Turbine Gearbox Technologies: April 2010Document19 pagesWind Turbine Gearbox Technologies: April 2010Adarsh ShindeNo ratings yet
- DDDDocument18 pagesDDDStudies 123No ratings yet
- Design and Manufacturing of Carbon Fiber Composite Drive Shaft As An Alternative To Conventional Steel Drive ShaftDocument10 pagesDesign and Manufacturing of Carbon Fiber Composite Drive Shaft As An Alternative To Conventional Steel Drive ShaftInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- JOAPE - Volume 2 - Issue 2 - Pages 121-128Document8 pagesJOAPE - Volume 2 - Issue 2 - Pages 121-128uma.bhuvanNo ratings yet
- InTech-Wind Turbine Gearbox TechnologiesDocument18 pagesInTech-Wind Turbine Gearbox TechnologieshamdimouhhiNo ratings yet
- 3D MEC Modeling of A Hybrid-Excited Claw Pole Alternator Incorporating The Rotor MotionDocument7 pages3D MEC Modeling of A Hybrid-Excited Claw Pole Alternator Incorporating The Rotor Motionreddy venkata krishnaNo ratings yet
- A New Flywheel Energy Storage System: Using Hybrid Superconducting Magnetic BearingsDocument4 pagesA New Flywheel Energy Storage System: Using Hybrid Superconducting Magnetic BearingsDeepak SharmaNo ratings yet
- Performance Improvement of Magnetic Gear and Efficiency Comparison With Conventional Mechanical GearDocument4 pagesPerformance Improvement of Magnetic Gear and Efficiency Comparison With Conventional Mechanical GearnevesunipampaNo ratings yet
- Rotary-Axial Spindles For Ultra-Precision MachiningDocument4 pagesRotary-Axial Spindles For Ultra-Precision MachiningphuongdxNo ratings yet
- Design and Analysis of Steam Turbine Blade: A. Ponshanmugakumar & R. RajavelDocument6 pagesDesign and Analysis of Steam Turbine Blade: A. Ponshanmugakumar & R. RajavelTJPRC PublicationsNo ratings yet
- A Low-Speed, High-Torque, Direct-Drive Permanent Magnet Generator For Wind TurbineDocument8 pagesA Low-Speed, High-Torque, Direct-Drive Permanent Magnet Generator For Wind TurbineHelicon1No ratings yet
- Analysis of The Yokeless and Segmented Armature MachineDocument7 pagesAnalysis of The Yokeless and Segmented Armature Machineantriksh mahajanNo ratings yet
- Analysis of The Yokeless and Segmented Armature MachineDocument7 pagesAnalysis of The Yokeless and Segmented Armature MachineSeksan KhamkaewNo ratings yet
- A.C. MachineDocument32 pagesA.C. MachinehayikNo ratings yet
- Offshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsFrom EverandOffshore Mechanics: Structural and Fluid Dynamics for Recent ApplicationsNo ratings yet
- AnamnezaDocument3 pagesAnamnezaTeodora StevanovicNo ratings yet
- Class 28: Outline: Hour 1: Displacement Current Maxwell's Equations Hour 2: Electromagnetic WavesDocument33 pagesClass 28: Outline: Hour 1: Displacement Current Maxwell's Equations Hour 2: Electromagnetic Wavesakirank1No ratings yet
- Most Important One Liner Questions and Answers May 2022Document15 pagesMost Important One Liner Questions and Answers May 2022pradeepNo ratings yet
- Design A Roller Coaster ProjectDocument4 pagesDesign A Roller Coaster Projectapi-3564628400% (1)
- Chapter 2Document82 pagesChapter 2Kavitha Selvaraj50% (2)
- Effect of Acetylation Method On Characterization of Cellulose Acetate Based Sago "Hampas"Document18 pagesEffect of Acetylation Method On Characterization of Cellulose Acetate Based Sago "Hampas"myrraNo ratings yet
- Chinese ArchitectureDocument31 pagesChinese Architecturenusantara knowledge100% (2)
- Master of Business Administration in Aviation Management MbaamDocument10 pagesMaster of Business Administration in Aviation Management MbaamAdebayo KehindeNo ratings yet
- Daoyin Physical Calisthenics in The Internal Arts by Sifu Bob Robert Downey Lavericia CopelandDocument100 pagesDaoyin Physical Calisthenics in The Internal Arts by Sifu Bob Robert Downey Lavericia CopelandDragonfly HeilungNo ratings yet
- S.V. Kulkarni, S.A. Khaparde Transformer and Inductor Design Handbook 2004Document532 pagesS.V. Kulkarni, S.A. Khaparde Transformer and Inductor Design Handbook 2004Gianpiero Boccato0% (1)
- Certified: Steelfab of VirginiaDocument1 pageCertified: Steelfab of VirginiaRamume188No ratings yet
- Your Heart: Build Arms Like ThisDocument157 pagesYour Heart: Build Arms Like ThisNightNo ratings yet
- Glacial Lakes of Himachal PradeshDocument4 pagesGlacial Lakes of Himachal PradeshMonidipa DeyNo ratings yet
- Feature Writing EnglishDocument2 pagesFeature Writing EnglishAldren BababooeyNo ratings yet
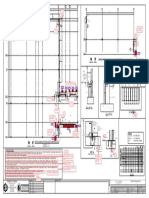
- Non-Pen MountDocument17 pagesNon-Pen MountT BagNo ratings yet
- The Sea DevilDocument6 pagesThe Sea DevilRevthi SankerNo ratings yet
- EQ Cheat SheetDocument7 pagesEQ Cheat SheetGabrielNo ratings yet
- Welding Research Council: BulletinDocument28 pagesWelding Research Council: BulletinRogerio Tropia GranjaNo ratings yet
- RA9275Document49 pagesRA9275znarf_ryanNo ratings yet
- Paper 2 With Solution MathematicsDocument17 pagesPaper 2 With Solution MathematicsFaiz AhmadNo ratings yet
- Art and Geography: Patterns in The HimalayaDocument30 pagesArt and Geography: Patterns in The HimalayaBen WilliamsNo ratings yet
- ELC609F12 Lec0 IntroductionDocument16 pagesELC609F12 Lec0 IntroductionMohammed El-AdawyNo ratings yet
- Menstrupedia Comic: The Friendly Guide To Periods For Girls (2014), by Aditi Gupta, Tuhin Paul, and Rajat MittalDocument4 pagesMenstrupedia Comic: The Friendly Guide To Periods For Girls (2014), by Aditi Gupta, Tuhin Paul, and Rajat MittalMy Home KaviNo ratings yet
- Soal Bahasa Inggris X - XiDocument6 pagesSoal Bahasa Inggris X - XiBydowie IqbalNo ratings yet
- Good Stuff Courage, Resilience, Gratitude, Generosity, Forgiveness, and Sacrifice (Akhtar, Salman)Document221 pagesGood Stuff Courage, Resilience, Gratitude, Generosity, Forgiveness, and Sacrifice (Akhtar, Salman)madhugaggar999No ratings yet
- Annual Report 2022-23 (Eng.)Document326 pagesAnnual Report 2022-23 (Eng.)Gaurav DurejaNo ratings yet