You might also like
- Numerical Methods! For! Elliptic Equations-I!: X F X + B X + CF SDocument12 pagesNumerical Methods! For! Elliptic Equations-I!: X F X + B X + CF SAkif CengizNo ratings yet
- Classification of Partial Classification of Partial Differential Differential Equations Equations.Document8 pagesClassification of Partial Classification of Partial Differential Differential Equations Equations.Topan SetiadipuraNo ratings yet
- Introduction To Partial Differential Equations in Fluid Mechanics: Their Types and Some Analytical SolutionsDocument20 pagesIntroduction To Partial Differential Equations in Fluid Mechanics: Their Types and Some Analytical Solutions刘伟轩No ratings yet
- Solving Euler EquationsDocument8 pagesSolving Euler EquationsRaul Martinez JardonNo ratings yet
- MIT8 03SCF16 Lec10Document9 pagesMIT8 03SCF16 Lec10Dhiman KalitaNo ratings yet
- The Advection-Diffusion equation!: ∂u ∂t + u ∂u ∂x + v ∂u ∂y = − 1 ρ ∂P ∂x + µ ρ ∂ ∂x + ∂ ∂y ⎛ ⎝ ⎜ ⎞ ⎠ ⎟Document8 pagesThe Advection-Diffusion equation!: ∂u ∂t + u ∂u ∂x + v ∂u ∂y = − 1 ρ ∂P ∂x + µ ρ ∂ ∂x + ∂ ∂y ⎛ ⎝ ⎜ ⎞ ⎠ ⎟Ernesto LimaNo ratings yet
- 3 The First Law: The Machinery: Solutions To ExercisesDocument13 pages3 The First Law: The Machinery: Solutions To ExercisesRenan Gustavo PazNo ratings yet
- Arfken MMCH 9 S 4 e 6Document2 pagesArfken MMCH 9 S 4 e 6Suresh Chandra JoshiNo ratings yet
- Supplementary Formulae SheetDocument2 pagesSupplementary Formulae SheetTony WANGNo ratings yet
- Note 1Document2 pagesNote 1junwoojung0908No ratings yet
- 04 PseudospectralmethodsDocument20 pages04 PseudospectralmethodsEverything in worldNo ratings yet
- CERN2009a - UnknownDocument22 pagesCERN2009a - UnknownAnkitNo ratings yet
- Level-Set and Phase-Field Methods: Application To Moving Interfaces and Two-Phase Fluid FlowsDocument27 pagesLevel-Set and Phase-Field Methods: Application To Moving Interfaces and Two-Phase Fluid FlowsDr-Ateeq Ur RehmanNo ratings yet
- Solution HW 3 1Document6 pagesSolution HW 3 1Fathima ChemmangathNo ratings yet
- Lecture17 Equations IsothermalSystems 4Document14 pagesLecture17 Equations IsothermalSystems 4shubhamNo ratings yet
- Jacobian MethodsDocument23 pagesJacobian MethodsOdhieNo ratings yet
- Chapter2 PDFDocument28 pagesChapter2 PDFRukminiNo ratings yet
- B3D: Mathematics University College London Spring 2006.: 1 Functions of Several VariablesDocument7 pagesB3D: Mathematics University College London Spring 2006.: 1 Functions of Several VariablesRoy VeseyNo ratings yet
- FormulasDocument2 pagesFormulasRohit RajNo ratings yet
- Intro2CFD Lecture1 Pulliam Intro SlidesDocument22 pagesIntro2CFD Lecture1 Pulliam Intro SlidesVladimir JovanovicNo ratings yet
- Lecture19 Two Independents Variables 2Document14 pagesLecture19 Two Independents Variables 2shubhamNo ratings yet
- Movie Segment: InstantaneousDocument18 pagesMovie Segment: InstantaneousAwishka ThuduwageNo ratings yet
- 2 Photonpropagator PDF 15403Document26 pages2 Photonpropagator PDF 15403schrodingerscat693No ratings yet
- Vector Derivatives: Ds DX 1 ( Det G)Document5 pagesVector Derivatives: Ds DX 1 ( Det G)Peter He ZhengNo ratings yet
- 1 Math Fundamentals: 1.1 Integrals, Factors and TechniquesDocument11 pages1 Math Fundamentals: 1.1 Integrals, Factors and Techniquesroy_gettyNo ratings yet
- Heat Transfer NotesDocument12 pagesHeat Transfer NotesSneha SinghNo ratings yet
- Navier Srokes Implicit LectureDocument76 pagesNavier Srokes Implicit LectureVladimir JovanovicNo ratings yet
- Chapter 2 BDocument11 pagesChapter 2 BStefanPerendijaNo ratings yet
- Quantum Field Theory: Example Sheet 1: 1. Decoupled Harmonic OscillatorDocument5 pagesQuantum Field Theory: Example Sheet 1: 1. Decoupled Harmonic OscillatorUday SoodNo ratings yet
- Electromagnetic Waves in Vacuum: Maxwell's Equations in Free SpaceDocument6 pagesElectromagnetic Waves in Vacuum: Maxwell's Equations in Free SpacePranav KNo ratings yet
- 3.18 Unsteady Motion - Added Mass: 2.20 - Marine Hydrodynamics, Spring 2005Document12 pages3.18 Unsteady Motion - Added Mass: 2.20 - Marine Hydrodynamics, Spring 2005Alam Castillo HerreraNo ratings yet
- ADI Nat NanDocument3 pagesADI Nat NanRysul KabirNo ratings yet
- 122 TD4Document15 pages122 TD4Sebastiao SilvaNo ratings yet
- Solution 3 PDFDocument17 pagesSolution 3 PDFToby ChengNo ratings yet
- ECE-656: Fall 2009: Balance Equation ApproachDocument39 pagesECE-656: Fall 2009: Balance Equation ApproachMuhammad SharifNo ratings yet
- MinorDocument4 pagesMinorSarrahNo ratings yet
- Numerical Solution of Diffusion Equation: Julian JaramilloDocument30 pagesNumerical Solution of Diffusion Equation: Julian JaramilloAndrés Jireh FuentesNo ratings yet
- Sôntomoc Odhgìc Jewrðac Gia To M Jhma Arijmhtik An Lush I: Basðlhc Gal NHCDocument13 pagesSôntomoc Odhgìc Jewrðac Gia To M Jhma Arijmhtik An Lush I: Basðlhc Gal NHCconst_No ratings yet
- Final Exam Formula Sheet: Ikx IkxDocument3 pagesFinal Exam Formula Sheet: Ikx IkxEnrique JimenezNo ratings yet
- Maths4ml MVC FormulaeDocument2 pagesMaths4ml MVC FormulaeMuhammad FaizanNo ratings yet
- Lecture10 PDFDocument28 pagesLecture10 PDFTihomir MarkovicNo ratings yet
- PHD Lecture11 12Document10 pagesPHD Lecture11 12Roy VeseyNo ratings yet
- PHAS1245: Mathematical Methods I - Problem Sheet 7: A/ (V RT)Document1 pagePHAS1245: Mathematical Methods I - Problem Sheet 7: A/ (V RT)Roy VeseyNo ratings yet
- Substitution Variable Ref1Document19 pagesSubstitution Variable Ref1Christian Paskah WNo ratings yet
- 3.2: Causality and Invertibility: Example: Mean and ACVF of An AR (1) Process 3.2.1Document5 pages3.2: Causality and Invertibility: Example: Mean and ACVF of An AR (1) Process 3.2.1Ana ScaletNo ratings yet
- Griffiths QMCH 1 P 14Document2 pagesGriffiths QMCH 1 P 14abc xyzNo ratings yet
- FormulaDocument2 pagesFormulaFarid ImranNo ratings yet
- Convection BLDocument77 pagesConvection BLAHMED EL HAMRINo ratings yet
- 16100lecture6 CGDocument2 pages16100lecture6 CGnaveenNo ratings yet
- CM Ext, Tot CM CM CM CM CM Ext, Tot Ext, Tot 0 I I CMDocument4 pagesCM Ext, Tot CM CM CM CM CM Ext, Tot Ext, Tot 0 I I CMsudhildeyNo ratings yet
- Constants and Key Equations in Chemicall ReactionDocument5 pagesConstants and Key Equations in Chemicall ReactionFrancisca BrazNo ratings yet
- EM 5 LaplaceEqnDocument6 pagesEM 5 LaplaceEqndes tosNo ratings yet
- Problem Set 7 Solution Set: Anthony VarillyDocument6 pagesProblem Set 7 Solution Set: Anthony VarillywieirraNo ratings yet
- CFL Number CFL NumberDocument5 pagesCFL Number CFL NumberTopan SetiadipuraNo ratings yet
- Maxwell EqsDocument29 pagesMaxwell Eqszanjabila abilNo ratings yet
- Final ProjectDocument4 pagesFinal ProjectChacho BacoaNo ratings yet
- Week 1 SolutionsDocument8 pagesWeek 1 SolutionsAbdul MNo ratings yet
- 1 Two and Three Dimensional ProblemsDocument4 pages1 Two and Three Dimensional Problemsgaurang agarwalNo ratings yet
- 1 Two and Three Dimensional ProblemsDocument11 pages1 Two and Three Dimensional Problemsgaurang agarwalNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
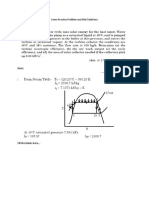
- Some Practice Problem and Hint/Solutions Q1Document6 pagesSome Practice Problem and Hint/Solutions Q1chutiya chamanNo ratings yet
- A Self-Supervised Terrain Roughness Estimator PDFDocument8 pagesA Self-Supervised Terrain Roughness Estimator PDFchutiya chamanNo ratings yet
- TCS Research FDocument4 pagesTCS Research Fchutiya chamanNo ratings yet
- The Business of The 21 Stcentury BookDocument9 pagesThe Business of The 21 Stcentury Bookchutiya chamanNo ratings yet
- The Business of The 21 Stcentury BookDocument9 pagesThe Business of The 21 Stcentury Bookchutiya chamanNo ratings yet
- B EngDocument557 pagesB EngHuniBegeNo ratings yet
- Final-Announcement: Vijay K SrivastavaDocument46 pagesFinal-Announcement: Vijay K Srivastavachutiya chamanNo ratings yet
- Deformable-Wheel Robot Based On Soft MaterialDocument7 pagesDeformable-Wheel Robot Based On Soft Materialchutiya chamanNo ratings yet
- TCS Research FDocument4 pagesTCS Research Fchutiya chamanNo ratings yet
- Ns 18 Beam StressDocument9 pagesNs 18 Beam StressrajdrklNo ratings yet
- Exercices Corrigesd AnalysepremiereanneeuniversitaireDocument131 pagesExercices Corrigesd AnalysepremiereanneeuniversitaireccccNo ratings yet
- 212 A 10 Lecture 1Document66 pages212 A 10 Lecture 1Luiza BezneaNo ratings yet
- Ordinary Differential Equations of Order One: Prepared By: Perlita A. RecileDocument51 pagesOrdinary Differential Equations of Order One: Prepared By: Perlita A. RecileChery-Ann GorospeNo ratings yet
- 23 3 Even Odd Fns PDFDocument10 pages23 3 Even Odd Fns PDFUnknownNo ratings yet
- YoDocument28 pagesYoBu DakNo ratings yet
- MT 223 PDFDocument1 pageMT 223 PDFAli AhmedNo ratings yet
- Handbook PDFDocument244 pagesHandbook PDFShashank SharmaNo ratings yet
- 2 - Applied Maths-IIDocument10 pages2 - Applied Maths-IILõvê ÜhhNo ratings yet
- Taylor-Mclaurin (Power) Series Expansions The Identity TheoremDocument10 pagesTaylor-Mclaurin (Power) Series Expansions The Identity TheoremBORNASCHNo ratings yet
- Numerical Differentiation First Derivative: Reminder: Definition of DifferentiationDocument7 pagesNumerical Differentiation First Derivative: Reminder: Definition of DifferentiationRacheNo ratings yet
- PDFDocument26 pagesPDFLakshminathSinganapudiNo ratings yet
- Numerical IntegrationDocument9 pagesNumerical IntegrationHasibul HasanNo ratings yet
- Differentiation and Its Application in BusinessDocument8 pagesDifferentiation and Its Application in Businessaamirmubasher859367% (3)
- Chapter 1, Lecture 1: Conservation EquationsDocument5 pagesChapter 1, Lecture 1: Conservation EquationsCristian AmadorNo ratings yet
- Laplace Transformation PDFDocument114 pagesLaplace Transformation PDFHector Ledesma III100% (1)
- Numerical Methods-FINALSDocument4 pagesNumerical Methods-FINALSCeasy Boy PeraltaNo ratings yet
- MATH 219 Introduction To Differential Equations: Akisisel@metu - Edu.tr Mcakmak@metu - Edu.trDocument3 pagesMATH 219 Introduction To Differential Equations: Akisisel@metu - Edu.tr Mcakmak@metu - Edu.trMuhittin ÖzenNo ratings yet
- Curriculum: Bachelor of Science in Computer Engineering (2014 - 2015 Curriculum)Document5 pagesCurriculum: Bachelor of Science in Computer Engineering (2014 - 2015 Curriculum)Nikki CardenasNo ratings yet
- Practice MidtermDocument1 pagePractice Midterm3dd2ef652ed6f7No ratings yet
- AP Calculus AB 1973 MC No CalculatorDocument9 pagesAP Calculus AB 1973 MC No CalculatorSam DeCastroNo ratings yet
- Calculus 3 Solution ManualDocument150 pagesCalculus 3 Solution ManualAdrian Antonio Torres100% (2)
- SECTION 5.5 The Substitution RuleDocument12 pagesSECTION 5.5 The Substitution Rulemyyedek2022No ratings yet
- Mathematics-I: Code No: MA1501 Model Question Paper I B. Tech I Semester External ExaminationsDocument2 pagesMathematics-I: Code No: MA1501 Model Question Paper I B. Tech I Semester External ExaminationsKrish PavanNo ratings yet
- Lecture Notes (Chapter 1.3 Partial Derivative, Implicit Differentiation)Document6 pagesLecture Notes (Chapter 1.3 Partial Derivative, Implicit Differentiation)Ammar WahabNo ratings yet
- Complex VariablesDocument15 pagesComplex VariablessreekanthaNo ratings yet
- Single Variable - Line Integrals - Green's Theorem - Stokes' Theorem - Gauss' TheoremDocument16 pagesSingle Variable - Line Integrals - Green's Theorem - Stokes' Theorem - Gauss' TheoremprashantkumarrrrNo ratings yet
- PDEDocument2 pagesPDEHritik Vinayak LalNo ratings yet
- Introduction To Fractional Differential EquationsDocument199 pagesIntroduction To Fractional Differential EquationsAzahel RangelNo ratings yet
- Mathematical Analysis by S C Malik Savita Arora 1906574111 2 PDFDocument6 pagesMathematical Analysis by S C Malik Savita Arora 1906574111 2 PDFsiddharth mohantyNo ratings yet