You might also like
- 7 LeRouxDocument15 pages7 LeRouxitzrozazNo ratings yet
- LeRoux Masters Presentation PDFDocument46 pagesLeRoux Masters Presentation PDFTaahirNo ratings yet
- LeRoux Efficiency 2014Document40 pagesLeRoux Efficiency 2014TaahirNo ratings yet
- Case Studies in Thermal Engineering: C. Tzivanidis, E. Bellos, D. Korres, K.A. Antonopoulos, G. MitsopoulosDocument12 pagesCase Studies in Thermal Engineering: C. Tzivanidis, E. Bellos, D. Korres, K.A. Antonopoulos, G. MitsopoulosMuhammad OsamaNo ratings yet
- Case Studies in Thermal Engineering: C. Tzivanidis, E. Bellos, D. Korres, K.A. Antonopoulos, G. MitsopoulosDocument12 pagesCase Studies in Thermal Engineering: C. Tzivanidis, E. Bellos, D. Korres, K.A. Antonopoulos, G. Mitsopoulos11751175No ratings yet
- E J Bala Thesis 1984Document197 pagesE J Bala Thesis 1984j00ej00eNo ratings yet
- 1361450193chapter 05 Parabolic TroughDocument106 pages1361450193chapter 05 Parabolic Troughpthakur234No ratings yet
- A Novel Parabolic Trough Solar Collector Model - Validation With Experimental Data and Comparison To Engineering Equation Solver (EES) (2015)Document14 pagesA Novel Parabolic Trough Solar Collector Model - Validation With Experimental Data and Comparison To Engineering Equation Solver (EES) (2015)AnikilatorBoy100% (1)
- Gong2017 PDFDocument18 pagesGong2017 PDFsujieNo ratings yet
- Ray Thermal StructuralCoupledAnalysisofParabolicTroughSolarCollectorSystemDocument18 pagesRay Thermal StructuralCoupledAnalysisofParabolicTroughSolarCollectorSystemdjemNo ratings yet
- Heidemann1992 FDF Absorber PDFDocument9 pagesHeidemann1992 FDF Absorber PDFToño SandaNo ratings yet
- Sustainable Energy Technologies and Assessments: E. Bellos, D. Korres, C. Tzivanidis, K.A. AntonopoulosDocument11 pagesSustainable Energy Technologies and Assessments: E. Bellos, D. Korres, C. Tzivanidis, K.A. AntonopoulosObaidNo ratings yet
- Single-Pass Evacuated Tube Collector with CPC Reflector PerformanceDocument15 pagesSingle-Pass Evacuated Tube Collector with CPC Reflector PerformanceWalid MarouaneNo ratings yet
- Solar driven trigeneration system exergy modelingDocument17 pagesSolar driven trigeneration system exergy modelingQadir AbbasiNo ratings yet
- Hybrid Photovoltaic Thermal PV-T Solar Systems Simulation With Simulink MatlabDocument12 pagesHybrid Photovoltaic Thermal PV-T Solar Systems Simulation With Simulink MatlabnivamNo ratings yet
- Good PaperDocument22 pagesGood PaperMurtadhaNo ratings yet
- Applied Energy: Marco Potenza, Marco Milanese, Gianpiero Colangelo, Arturo de RisiDocument11 pagesApplied Energy: Marco Potenza, Marco Milanese, Gianpiero Colangelo, Arturo de Risiaun_nustNo ratings yet
- Modeling The Small-Scale Dish-Mounted Solar Thermal Brayton CycleDocument9 pagesModeling The Small-Scale Dish-Mounted Solar Thermal Brayton CyclesanthoshnlNo ratings yet
- Solar Thermal Power PlantsDocument9 pagesSolar Thermal Power PlantsAkshay Kumar MenasinakayiNo ratings yet
- Effect of Acceptance Angle On The Design and Performance of A Heat Pipe Based Compound Parabolic Collector at Kano, NigeriaDocument7 pagesEffect of Acceptance Angle On The Design and Performance of A Heat Pipe Based Compound Parabolic Collector at Kano, NigeriaGowtham T 19MCD1005No ratings yet
- 1 s2.0 S2451904921000949 MainDocument9 pages1 s2.0 S2451904921000949 MainElder Marino Mendoza OrbegosoNo ratings yet
- Ijett V38P207Document6 pagesIjett V38P207Ahmed Mohamed AhmedNo ratings yet
- Manikandan 2019 Enhancing The Optical and Thermal e PDFDocument17 pagesManikandan 2019 Enhancing The Optical and Thermal e PDFPedro Reynaldo MartinezNo ratings yet
- A Simplified Opto-Thermal Assessment and Economic Study of Parabolic DishDocument14 pagesA Simplified Opto-Thermal Assessment and Economic Study of Parabolic DishdocwyfNo ratings yet
- REE Lab ManualDocument28 pagesREE Lab ManualArc ReactorNo ratings yet
- Renewable Energy: Ze-Dong Cheng, Ya-Ling He, Yu QiuDocument9 pagesRenewable Energy: Ze-Dong Cheng, Ya-Ling He, Yu QiuTeshome BekeleNo ratings yet
- balijepalli2017.pdf سولر جديدDocument12 pagesbalijepalli2017.pdf سولر جديدAmmar Al-KindyNo ratings yet
- 1 s2.0 S2214157X18303484 MainDocument11 pages1 s2.0 S2214157X18303484 Maindessie tadeleNo ratings yet
- Parabolic Trough Receiver With Corrugated Tube For Improving HeatDocument14 pagesParabolic Trough Receiver With Corrugated Tube For Improving HeatIynulF.OmarNo ratings yet
- Performance Study of Fog Desalination System Coupled With Evacuated TubeDocument14 pagesPerformance Study of Fog Desalination System Coupled With Evacuated TubeAhmed HamedNo ratings yet
- Analysis of PVT Flat Plate Water Collectors Connected in Series PDFDocument14 pagesAnalysis of PVT Flat Plate Water Collectors Connected in Series PDFDHRUV VEMURUNo ratings yet
- Solar Thermal Power PlantsDocument9 pagesSolar Thermal Power PlantsRakesh Kumar NayakNo ratings yet
- Performance Characteristics of Heat Loss of The Inverted Hemispherical Solar Concentrator ReceiverDocument5 pagesPerformance Characteristics of Heat Loss of The Inverted Hemispherical Solar Concentrator ReceiverAkshay JoshiNo ratings yet
- Hourly Simulation of Parabolic Trough Solar Collector With Simultaneous Solar Radiation and Weather Conditions During Sunshine Period in Cairo-EgyptDocument15 pagesHourly Simulation of Parabolic Trough Solar Collector With Simultaneous Solar Radiation and Weather Conditions During Sunshine Period in Cairo-EgyptIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Performance Analysis of Parabolic Solar Collector at Various Operating Conditions Ijariie4090Document10 pagesPerformance Analysis of Parabolic Solar Collector at Various Operating Conditions Ijariie4090satishNo ratings yet
- 1-s2.0-S0038092X15002157-mainDocument11 pages1-s2.0-S0038092X15002157-mainasalazarhNo ratings yet
- Thermal analysis of porous solar receiver with quartz windowDocument12 pagesThermal analysis of porous solar receiver with quartz windowAzharuddin_kfupmNo ratings yet
- A Detailed Thermal Model of A Parabolic Trough Collector Receiver PDFDocument9 pagesA Detailed Thermal Model of A Parabolic Trough Collector Receiver PDFAnikilatorBoy100% (1)
- 10 1016@j Seta 2020 100714 PDFDocument15 pages10 1016@j Seta 2020 100714 PDFVijay KumarNo ratings yet
- Energy 2019Document48 pagesEnergy 2019zhor El hallaouiNo ratings yet
- Solar Receivers for Thermal Power Generation: Fundamentals and Advanced ConceptsFrom EverandSolar Receivers for Thermal Power Generation: Fundamentals and Advanced ConceptsNo ratings yet
- Heat Transfer Modeling of A Parabolic Trough Solar Collector With Working Fluid of Fe3O4 and CuOTherminol 66 Nanofluids Under Magnetic FieldDocument20 pagesHeat Transfer Modeling of A Parabolic Trough Solar Collector With Working Fluid of Fe3O4 and CuOTherminol 66 Nanofluids Under Magnetic FieldabdullaalakourNo ratings yet
- 1 s2.0 S1755008422000035 MainDocument14 pages1 s2.0 S1755008422000035 MainJenny JadhavNo ratings yet
- Combined Laminar Natural Convection and Surface Radiation Heat Transfer in A Modified Cavity Receiver of Solar Parabolic DishDocument11 pagesCombined Laminar Natural Convection and Surface Radiation Heat Transfer in A Modified Cavity Receiver of Solar Parabolic DishArjunSinghNo ratings yet
- Exergy Analysis of Parabolic Trough Sola PDFDocument8 pagesExergy Analysis of Parabolic Trough Sola PDF11751175No ratings yet
- Parabolic Trough CollectorDocument21 pagesParabolic Trough Collectorchandelakshay0167% (3)
- Design and Optimization of Solar Parabolic Trough Collector With Evacuated Absorber by Grey Relational AnalysisDocument9 pagesDesign and Optimization of Solar Parabolic Trough Collector With Evacuated Absorber by Grey Relational AnalysissatishNo ratings yet
- 1 s2.0 S187661021500507X MainDocument11 pages1 s2.0 S187661021500507X MainLIA PUTRIYANANo ratings yet
- Advancing-Tube-Receiver-Performance-by-Using-Corrugated-T_2015_Energy-ProcedDocument10 pagesAdvancing-Tube-Receiver-Performance-by-Using-Corrugated-T_2015_Energy-Procedpaween saetaeNo ratings yet
- Thermal Analysis of Parabolic Trough Solar Collector and Assessment of Steam Power Potential at Two Locations in CameroonDocument13 pagesThermal Analysis of Parabolic Trough Solar Collector and Assessment of Steam Power Potential at Two Locations in CameroonsabhanNo ratings yet
- Exergy Analysis of Parabolic Trough Sola PDFDocument8 pagesExergy Analysis of Parabolic Trough Sola PDFWuberestNo ratings yet
- REE 231 Record Satyender Yadav PDFDocument63 pagesREE 231 Record Satyender Yadav PDFDileep PunawatNo ratings yet
- Ref 8 Effective Solar-Thermal Collector With Uniform ConcentrationDocument7 pagesRef 8 Effective Solar-Thermal Collector With Uniform ConcentrationSayed DesoukiNo ratings yet
- An-Experimental-Study-on-a-Sodium-Loop-type-Heat-Pipe-for-Ther_2015_Energy-PDocument10 pagesAn-Experimental-Study-on-a-Sodium-Loop-type-Heat-Pipe-for-Ther_2015_Energy-Ppaween saetaeNo ratings yet
- Termal Model of A DishDocument9 pagesTermal Model of A Dishirma milena garcia pastorNo ratings yet
- 1 s2.0 S2214157X23011747 MainDocument16 pages1 s2.0 S2214157X23011747 MainNura MuazNo ratings yet
- A Parabolic DishAMTEC Solar Thermal Power System and Its Performance EvaluationDocument11 pagesA Parabolic DishAMTEC Solar Thermal Power System and Its Performance EvaluationNuleiv100% (1)
- Design of The Collector of A Solar Dish-Stirling SystemDocument9 pagesDesign of The Collector of A Solar Dish-Stirling SystemStephen TabiarNo ratings yet
- Piezoelectric Actuators: Vector Control Method: Basic, Modeling and Mechatronic Design of Ultrasonic DevicesFrom EverandPiezoelectric Actuators: Vector Control Method: Basic, Modeling and Mechatronic Design of Ultrasonic DevicesNo ratings yet
- Laser CuttingDocument9 pagesLaser CuttingBharath vNo ratings yet
- Mandate Form: Government of Karnataka Finance Department Department of TreasuriesDocument1 pageMandate Form: Government of Karnataka Finance Department Department of TreasuriesBharath vNo ratings yet
- ReportDocument17 pagesReportBharath vNo ratings yet
- Lokesh First Page1Document4 pagesLokesh First Page1Bharath vNo ratings yet
- 113-0174.ocr 1Document2 pages113-0174.ocr 1Bharath vNo ratings yet
- BEL Project Report AnalysisDocument47 pagesBEL Project Report AnalysisSanjeev Sharma0% (1)
- ReportDocument55 pagesReportBharath vNo ratings yet
- Lokesh First Page1Document4 pagesLokesh First Page1Bharath vNo ratings yet
- Paper Battery NEWDocument56 pagesPaper Battery NEWBharath vNo ratings yet
- Innovative Tracking System For Parabolic Dish Solar CollectorDocument11 pagesInnovative Tracking System For Parabolic Dish Solar CollectorBharath vNo ratings yet
- Allstate Motorcycle Insurance Made SimpleDocument18 pagesAllstate Motorcycle Insurance Made SimpleBharath vNo ratings yet
- Innovative Tracking System For Parabolic Dish Solar CollectorDocument11 pagesInnovative Tracking System For Parabolic Dish Solar CollectorBharath vNo ratings yet
- Road Power GenerationDocument28 pagesRoad Power GenerationBharath v100% (2)
- Policy RiteshDocument2 pagesPolicy Riteshsmbcards50% (2)
- Presentation Parabolic DishDocument10 pagesPresentation Parabolic DishBharath vNo ratings yet
- CO2 Hydrogenation To MethanolDocument11 pagesCO2 Hydrogenation To MethanolMuhammad AliNo ratings yet
- Simple Harmonic Motion - ManualDocument5 pagesSimple Harmonic Motion - ManualMaimonh AlmamoryNo ratings yet
- Williams Et Al 2005 IOCG General SEGDocument36 pagesWilliams Et Al 2005 IOCG General SEGkissyxdNo ratings yet
- Unit 3 Test DraftDocument4 pagesUnit 3 Test Draftapi-291011460No ratings yet
- What Is Air Pollution-Acid RainDocument3 pagesWhat Is Air Pollution-Acid Rainrocio caceresNo ratings yet
- Naungzh/Jan2009 Chapter 1 - Fire Chemistry 1Document40 pagesNaungzh/Jan2009 Chapter 1 - Fire Chemistry 1S M Hasan100% (1)
- 9 SL-paper1Document10 pages9 SL-paper1My Logic MathNo ratings yet
- Sba3 (2019) Year 5 Science Paper 2Document12 pagesSba3 (2019) Year 5 Science Paper 2azmidaNo ratings yet
- Micro GridDocument15 pagesMicro GridSantosh Kumar Buyya100% (1)
- Petroleum Engineering and Project Development: Applied Graduate StudiesDocument2 pagesPetroleum Engineering and Project Development: Applied Graduate StudiesOmeruo EmekaNo ratings yet
- Intercambiador de CalorDocument55 pagesIntercambiador de Calorandy pandaNo ratings yet
- Demand Side Management and Load Control - A Case StudyDocument12 pagesDemand Side Management and Load Control - A Case StudyVibhuti Patel100% (1)
- Chapter1 PDFDocument21 pagesChapter1 PDFabimanaNo ratings yet
- 1. a. MgF2 - ionic b. ZnSO4 - ionic c. Al(OH)3 - molecular (covalent)2. a. potassium bromide - ionic b. Lead(II)nitrate - ionic c. Silver chlorate - ionicDocument27 pages1. a. MgF2 - ionic b. ZnSO4 - ionic c. Al(OH)3 - molecular (covalent)2. a. potassium bromide - ionic b. Lead(II)nitrate - ionic c. Silver chlorate - ionicRechellu ZamboangnonNo ratings yet
- What Makes Ice Melt Fastest HypothesisDocument4 pagesWhat Makes Ice Melt Fastest HypothesisNancy Ideker100% (2)
- IDEAL GAS PROCESSESDocument2 pagesIDEAL GAS PROCESSESfitriNo ratings yet
- BsscnotDocument6 pagesBsscnotJeshiNo ratings yet
- Chemical Theromodynamics: 1. ThermodynamicsDocument49 pagesChemical Theromodynamics: 1. ThermodynamicsHarsh TyagiNo ratings yet
- Nabcep SH Guide 8-5-13Document160 pagesNabcep SH Guide 8-5-13ZeljkoSipcicNo ratings yet
- Atomic MassesDocument5 pagesAtomic MassesJesús CastilloNo ratings yet
- Charcoal Briquette Production From PeanutDocument6 pagesCharcoal Briquette Production From PeanutAntonette Joy MagnoNo ratings yet
- Q. Papers ME2015 PDFDocument1,669 pagesQ. Papers ME2015 PDFKamleshNo ratings yet
- Structure of Atoms and IonsDocument34 pagesStructure of Atoms and IonsChristineNo ratings yet
- Drying Applications: CHE 408: Heat and Mass TransferDocument15 pagesDrying Applications: CHE 408: Heat and Mass TransferYasmin KayeNo ratings yet
- Script For Plates Lesson: Show The Word Plate Tectonics)Document6 pagesScript For Plates Lesson: Show The Word Plate Tectonics)Felix AlfonsoNo ratings yet
- Subject Object CognitionDocument143 pagesSubject Object Cognitionpsyops008100% (1)
- Gujarat Technological University: Introduction To Electric VehicleDocument3 pagesGujarat Technological University: Introduction To Electric VehicleKRISHNANo ratings yet
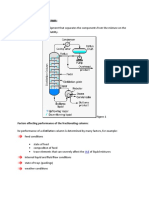
- Factors Effecting Performance of The Fractionating ColumnDocument4 pagesFactors Effecting Performance of The Fractionating ColumnHasieb Alam KhanNo ratings yet
- Physical Science Week 1Document15 pagesPhysical Science Week 1veive merlinNo ratings yet
- Moles and Equivalent Mass Chemistry ProblemsDocument30 pagesMoles and Equivalent Mass Chemistry ProblemsVuyyala Murthy100% (1)