You might also like
- Three Phase Generator Specs and Test ProceduresDocument18 pagesThree Phase Generator Specs and Test ProceduresJeremiah LangoeyNo ratings yet
- Meo Met OralsDocument18 pagesMeo Met OralsAnjali ChandravanshiNo ratings yet
- 1.H2219-20 MSBD (Rev.e - 11.04.11)Document138 pages1.H2219-20 MSBD (Rev.e - 11.04.11)Aleksandr AndreevNo ratings yet
- Marine Electrical KnowledgeDocument53 pagesMarine Electrical KnowledgeRhn RhnNo ratings yet
- Parallel Operation of Three-Phase AlternatorsDocument12 pagesParallel Operation of Three-Phase AlternatorsNayan Manna100% (2)
- Main Switch Board (MSB) Safeties, Protection and MaintenanceDocument9 pagesMain Switch Board (MSB) Safeties, Protection and MaintenanceRajeev ValunjkarNo ratings yet
- Class 2 Electrical Sorted QuestionsDocument8 pagesClass 2 Electrical Sorted QuestionsPrakhyati RautNo ratings yet
- Marine Growth Preventing Device Instr Manu - M-9-20Document22 pagesMarine Growth Preventing Device Instr Manu - M-9-20Gokul SureshNo ratings yet
- Connecting Rod B.E. BoltsDocument16 pagesConnecting Rod B.E. BoltsAnjaana PrashantNo ratings yet
- Report 2Document31 pagesReport 2Chnv RmrzNo ratings yet
- Electric Propulsion SystemDocument2 pagesElectric Propulsion SystemABIR MUKHERJEENo ratings yet
- Pneumatic P I DDocument12 pagesPneumatic P I Dmarine MukeshNo ratings yet
- ETO Exam SyllabusDocument3 pagesETO Exam SyllabusVarun AerosNo ratings yet
- All Electric Ship Integrated Power Systems PDFDocument6 pagesAll Electric Ship Integrated Power Systems PDFMario BogdanovicNo ratings yet
- Motors: Why Starters Are Not Used For Land Based Installations?Document12 pagesMotors: Why Starters Are Not Used For Land Based Installations?avm4343100% (1)
- Standard Safety High Voltage 12Document4 pagesStandard Safety High Voltage 12clinthenNo ratings yet
- Final ExamDocument5 pagesFinal Examirtiza200No ratings yet
- AC DC FormulasDocument9 pagesAC DC FormulasJay Mark BalaneNo ratings yet
- 4043 109 214 1960 4Document112 pages4043 109 214 1960 4Curtseit DinerNo ratings yet
- Speed LogDocument2 pagesSpeed LogDimas Angga100% (1)
- Ft 501英文说明书Document11 pagesFt 501英文说明书Rau MassHTNo ratings yet
- Life Boat Engine Starting ProcedureDocument1 pageLife Boat Engine Starting ProcedureSrini VasanNo ratings yet
- Fuel Oil FilterDocument4 pagesFuel Oil FilterTrișcă Cristian AndreiNo ratings yet
- How synchronous generators workDocument18 pagesHow synchronous generators workQuang Tiên100% (1)
- Pmi ManDocument8 pagesPmi ManCalandrasReyCalandrasreyNo ratings yet
- Masterpact NT NW InglesDocument204 pagesMasterpact NT NW InglesLuís LulaNo ratings yet
- GME Course - Syllabus - I-SemesterDocument33 pagesGME Course - Syllabus - I-SemesterBhalchandra ChandakkarNo ratings yet
- Electric cargo winch questions and answersDocument135 pagesElectric cargo winch questions and answerssyed muffassirNo ratings yet
- April 2021 Oral Questions - Chennai MMD: Motor SafetyDocument21 pagesApril 2021 Oral Questions - Chennai MMD: Motor SafetyAbdul MazithNo ratings yet
- MLC Spring 2015 Written Answer Questions Model SolutionsDocument17 pagesMLC Spring 2015 Written Answer Questions Model SolutionsDKzNo ratings yet
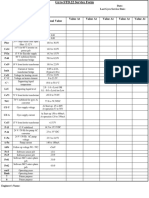
- STD.22 Parameters DetailsDocument1 pageSTD.22 Parameters DetailsJay SanchaniyaNo ratings yet
- Parallel Operation Procedure For Marine Diesel Generators in ShipsDocument3 pagesParallel Operation Procedure For Marine Diesel Generators in ShipsSwarg VibhaNo ratings yet
- Anfomatic Instruction Manual Rev 8.1Document25 pagesAnfomatic Instruction Manual Rev 8.1shishir4870No ratings yet
- Dhiraj ETO Oral Question SetDocument108 pagesDhiraj ETO Oral Question SetSaro100% (1)
- MGPS and Ferrous Ion GeneratorDocument31 pagesMGPS and Ferrous Ion GeneratorRodolfo L Suarez100% (1)
- 450 Volt Emergency Generator Switchboard Control and Instrumentation PanelDocument28 pages450 Volt Emergency Generator Switchboard Control and Instrumentation PanelBharatiyulamNo ratings yet
- QUESTIONS A FOR ELECTRO TECHNICAL OFFICER-ETO - Electro Technical OfficerDocument5 pagesQUESTIONS A FOR ELECTRO TECHNICAL OFFICER-ETO - Electro Technical OfficeramitNo ratings yet
- HV Manual MCADocument262 pagesHV Manual MCAsocrates19582405100% (1)
- MEO Orals On Marine Electro Technology Function 5Document19 pagesMEO Orals On Marine Electro Technology Function 5Rajeev ValunjkarNo ratings yet
- Cspcwg6-Inf1 CatzocDocument4 pagesCspcwg6-Inf1 Catzoctomislav_darlic100% (1)
- BOLLFILTER Electronic Controller Type 2200 PDFDocument34 pagesBOLLFILTER Electronic Controller Type 2200 PDFmail4ksn0% (1)
- Mitsubishi S-N ContactorsDocument7 pagesMitsubishi S-N Contactorsmanbkk100% (1)
- M238 Programming GuideDocument256 pagesM238 Programming GuideJuan Sánchez LópezNo ratings yet
- Design A Bonding SystemDocument11 pagesDesign A Bonding SystemNelson AguirreNo ratings yet
- Ship Automation ppt.1Document17 pagesShip Automation ppt.1Uchenna Claudio100% (1)
- Zorc PresentationDocument18 pagesZorc PresentationAyman AboudNo ratings yet
- Polarization Index TestDocument3 pagesPolarization Index TestShahriar AhmedNo ratings yet
- A.C.Synchronous Transmitter Manual PDFDocument15 pagesA.C.Synchronous Transmitter Manual PDFAbhishek RajNo ratings yet
- ELECTRONIC DIESEL CONTROL (EDC) SYSTEMDocument9 pagesELECTRONIC DIESEL CONTROL (EDC) SYSTEMSUNIL TNo ratings yet
- Marex OS III CatalogDocument88 pagesMarex OS III CatalogVALCICLEINo ratings yet
- Guide ETO Certificate - Requirements, Training & ApplicationDocument17 pagesGuide ETO Certificate - Requirements, Training & ApplicationJaga DhishNo ratings yet
- 03 Me-C Mop Part IDocument24 pages03 Me-C Mop Part ILyn LynNo ratings yet
- c8 PDFDocument64 pagesc8 PDFAnjaana PrashantNo ratings yet
- Free Energy 2Document7 pagesFree Energy 2Fadi BarakeNo ratings yet
- Research Article: A Permanent Magnet Generator For Energy Conversion From Marine Currents: No Load and Load ExperimentsDocument8 pagesResearch Article: A Permanent Magnet Generator For Energy Conversion From Marine Currents: No Load and Load ExperimentsJohn Paul BaquiranNo ratings yet
- Chapter 4Document17 pagesChapter 4Parveen KumarNo ratings yet
- Electric Machines: Faculty of Engineering Tanta UniversityDocument33 pagesElectric Machines: Faculty of Engineering Tanta UniversityMUuhammed FikiNo ratings yet
- OEVDocument2 pagesOEVVikash Khaliyav YadavNo ratings yet
- Marine Electrical Distribution SystemsDocument27 pagesMarine Electrical Distribution SystemsVikash Khaliyav YadavNo ratings yet
- Circuit Protection PDFDocument45 pagesCircuit Protection PDFVikash Khaliyav YadavNo ratings yet
- 2 - Introduction To The ME Engine PDFDocument14 pages2 - Introduction To The ME Engine PDFVikash Khaliyav Yadav50% (2)
- Work Experience: Kamble Arti Navnath MOB: (+91) 8830600972Document3 pagesWork Experience: Kamble Arti Navnath MOB: (+91) 8830600972KambleNo ratings yet
- Datasheet SSA-X300 170629Document1 pageDatasheet SSA-X300 170629aparichithudooNo ratings yet
- N05A 7 10 0 70030 01 05 Risk Assessment Dropped Object Analysis - SignedDocument45 pagesN05A 7 10 0 70030 01 05 Risk Assessment Dropped Object Analysis - SignedMustafa ShabanNo ratings yet
- Limiting FactorDocument4 pagesLimiting FactorVanesh Thakur0% (2)
- Dumpschema - LPGP C ENTITYDocument57 pagesDumpschema - LPGP C ENTITYSreenu VasuNo ratings yet
- Pbat 10 eDocument16 pagesPbat 10 eapi-290101261No ratings yet
- SGQ 1. Description: Technical Specification Wire Rod Quality: Sae1008Document1 pageSGQ 1. Description: Technical Specification Wire Rod Quality: Sae1008Sachin NambiarNo ratings yet
- Session 2: Function Block Diagram (FBD) Programming IDocument33 pagesSession 2: Function Block Diagram (FBD) Programming INói Chỉ ChuẩnNo ratings yet
- Kingstar Lighting InductionDocument8 pagesKingstar Lighting Inductionapi-194673166No ratings yet
- Problem SET 9.1Document9 pagesProblem SET 9.1Zhafaat RahimiNo ratings yet
- Map 3 D 2015 InstallDocument15 pagesMap 3 D 2015 InstallHarrison HayesNo ratings yet
- Assessing flexural-torsional buckling of steel beams using stiffness reductionDocument30 pagesAssessing flexural-torsional buckling of steel beams using stiffness reductionravi kumarNo ratings yet
- Alkali Boil OutDocument5 pagesAlkali Boil OutprithwichandraNo ratings yet
- Generator BrochureDocument32 pagesGenerator BrochuresudiNo ratings yet
- Ddrcs Unit 4Document22 pagesDdrcs Unit 4siva shanmukhaNo ratings yet
- Datenblatt 626Document3 pagesDatenblatt 626Mohamed AdelNo ratings yet
- Park To Playa Trail Feasibility Study and Wayfinding PlanDocument153 pagesPark To Playa Trail Feasibility Study and Wayfinding PlanEmpowerment Congress West Area Neighborhood Development CouncilNo ratings yet
- Limbach l2000 All Operatingandmaintenancemanual enDocument46 pagesLimbach l2000 All Operatingandmaintenancemanual enFernando MoreiraNo ratings yet
- Mark RMB 15-25 IVR ENG 6999200470Document6 pagesMark RMB 15-25 IVR ENG 6999200470RUDRA MORENo ratings yet
- Gentech LS-Series (Sensor Inundacion)Document113 pagesGentech LS-Series (Sensor Inundacion)Jose Maria CamberoNo ratings yet
- DFM Mold Design GuidelinesDocument37 pagesDFM Mold Design GuidelinesGiap NguyenNo ratings yet
- Type Curves ExplainedDocument59 pagesType Curves Explainedakshay shekhawatNo ratings yet
- (BS 5955-8-2001) - Plastics Pipework (Thermoplastics Materials) - Specification For The Installation of Thermoplastic Pipes and Associated Fittings For Use in Domestic HoDocument14 pages(BS 5955-8-2001) - Plastics Pipework (Thermoplastics Materials) - Specification For The Installation of Thermoplastic Pipes and Associated Fittings For Use in Domestic HojohnNo ratings yet
- 23-14683 HACCP Plan Review Checklist Rev. 09 01 17 PDFDocument4 pages23-14683 HACCP Plan Review Checklist Rev. 09 01 17 PDFIsna AndriantoNo ratings yet
- Mechanical Engineering Department: Republic of The Philippines Bicol University College of Engineering Legazpi CityDocument5 pagesMechanical Engineering Department: Republic of The Philippines Bicol University College of Engineering Legazpi CityJohn Carlo Balucio LlaveNo ratings yet
- 4869 9 Ds p1206c Prevectron 2 Ts2.25 Heritage Building Doc154a.ven Rev0Document1 page4869 9 Ds p1206c Prevectron 2 Ts2.25 Heritage Building Doc154a.ven Rev0saldivaroswaldoNo ratings yet
- 7150 DD RL InstallationDocument6 pages7150 DD RL InstallationMIGUELNo ratings yet
- Ceo Proposed Os 2022 - Whole DeptDocument1 pageCeo Proposed Os 2022 - Whole Deptthethird20No ratings yet
- DR Reporting Made Easy With Report Builder 3.0Document132 pagesDR Reporting Made Easy With Report Builder 3.0robertorojasfeijoNo ratings yet
- Abstract of Estimated Cost Project: Netra KharelDocument2 pagesAbstract of Estimated Cost Project: Netra KharelSandip BudhathokiNo ratings yet