You might also like
- Leo Minor ConstellationDocument6 pagesLeo Minor ConstellationMae Guanzon Saludes Cordero100% (2)
- Design and Analysis of Differential GearboxDocument49 pagesDesign and Analysis of Differential GearboxLakshmiprasad Kadari50% (4)
- Review On Design of Electric Formula CarDocument6 pagesReview On Design of Electric Formula CarIJRASETPublicationsNo ratings yet
- Economic Solution For Data Acquisition in A Formula SAE Race CarDocument6 pagesEconomic Solution For Data Acquisition in A Formula SAE Race CarmclarenrulzNo ratings yet
- Edge JS2 ERT William Anders, AstronautDocument10 pagesEdge JS2 ERT William Anders, AstronautFung AlexNo ratings yet
- Automatic Rain Sensing WiperDocument30 pagesAutomatic Rain Sensing WiperDelroy Washington BrownNo ratings yet
- Portfolio Risk & ReturnDocument37 pagesPortfolio Risk & ReturnAnonymous100% (1)
- Arc Flash HazardsDocument19 pagesArc Flash HazardsAhmed MostafaNo ratings yet
- Hybrid Vehicle ReportDocument17 pagesHybrid Vehicle ReportMidhun S Jacob100% (1)
- Remote Controlled Screw Jack 2014 AcDocument58 pagesRemote Controlled Screw Jack 2014 AcChockalingam AthilingamNo ratings yet
- Automatic Side StandDocument23 pagesAutomatic Side StandShekhar Sawant0% (1)
- C57.12.29-1999 Errata PDFDocument36 pagesC57.12.29-1999 Errata PDFEko SusantoNo ratings yet
- AC Electric Motors Control: Advanced Design Techniques and ApplicationsFrom EverandAC Electric Motors Control: Advanced Design Techniques and ApplicationsFouad GiriNo ratings yet
- AD 2000 Head Under Extenal PressureDocument2 pagesAD 2000 Head Under Extenal Pressuremechengg01100% (1)
- Sensors Used in HEVDocument4 pagesSensors Used in HEVvishiwizard100% (1)
- BradyDocument14 pagesBradydarnok0611No ratings yet
- Chlor Alkali TechnologyDocument14 pagesChlor Alkali TechnologyTinTin100% (1)
- Signals and SystemsDocument174 pagesSignals and Systemsjale charitha reddy50% (2)
- Steering Controlled Adaptive HeadlampsDocument7 pagesSteering Controlled Adaptive HeadlampsIJRASETPublicationsNo ratings yet
- Adaptive Headlights System For Four Wheelers A ReviewDocument9 pagesAdaptive Headlights System For Four Wheelers A ReviewIJRASETPublicationsNo ratings yet
- EPA SteeringDocument6 pagesEPA SteeringPranjul TyagiNo ratings yet
- Eccentric Cam Operated Semi Automatic Gear Shifting System For Two WheelerDocument8 pagesEccentric Cam Operated Semi Automatic Gear Shifting System For Two Wheelerkifle abelNo ratings yet
- Automatic Wall Painting Robot: P.Keerthanaa, K.Jeevitha, V.Navina, G.Indira, S.JayamaniDocument15 pagesAutomatic Wall Painting Robot: P.Keerthanaa, K.Jeevitha, V.Navina, G.Indira, S.JayamanisanjaykumatNo ratings yet
- Research PaperDocument5 pagesResearch PaperAayushJainNo ratings yet
- Freio Eletronico EngrenhagensDocument6 pagesFreio Eletronico EngrenhagensThiago ChierighiniNo ratings yet
- Android Based Advanced Car Lifting System Using Bluetooth: August 2017Document6 pagesAndroid Based Advanced Car Lifting System Using Bluetooth: August 2017Just4 FuntechNo ratings yet
- Mini Report-Hill Station Breaking SystemDocument24 pagesMini Report-Hill Station Breaking SystemNikhil PimpareNo ratings yet
- Electrical - Ijeee-Electronic Steerin of Automobiles SaranyaDocument8 pagesElectrical - Ijeee-Electronic Steerin of Automobiles Saranyaiaset123No ratings yet
- Power Generating Through Shock AbsorberDocument3 pagesPower Generating Through Shock AbsorberSrinivas SrinuNo ratings yet
- Downloads Papers N5a66e02a2e2c7 PDFDocument7 pagesDownloads Papers N5a66e02a2e2c7 PDFpramodh kumarNo ratings yet
- Experimental Setup of Steering Controlled Headlight MechanismDocument5 pagesExperimental Setup of Steering Controlled Headlight Mechanismnadeemq_0786100% (1)
- Automatic Hand Brake Release: Manoj Kandelkar, Ajit Lole, Abhijeet Jadhav, Vardhaman Kavathekar, Prof. Nikhil A. FaddasDocument7 pagesAutomatic Hand Brake Release: Manoj Kandelkar, Ajit Lole, Abhijeet Jadhav, Vardhaman Kavathekar, Prof. Nikhil A. Faddasakshay jadhavNo ratings yet
- Automatic Gear Shifting Mechanism in Two WheelersDocument5 pagesAutomatic Gear Shifting Mechanism in Two WheelersIJRASETPublicationsNo ratings yet
- "Development of A CPLD Based Novel Open Loop Stepper Motor Controller For High Performance Using VHDL" PDFDocument6 pages"Development of A CPLD Based Novel Open Loop Stepper Motor Controller For High Performance Using VHDL" PDFRuby Alexandra CruzNo ratings yet
- 12V DC Electric Car JackDocument4 pages12V DC Electric Car Jack2349 Rohit Ramesh GorivaleNo ratings yet
- Automatic Gear Transmission in Two Wheelers Using Embedded SystemDocument12 pagesAutomatic Gear Transmission in Two Wheelers Using Embedded Systemgriffin9dhavarevNo ratings yet
- Design and Fabrication of Automatic Side Stand For Two WheelersDocument4 pagesDesign and Fabrication of Automatic Side Stand For Two WheelersIJRASETPublicationsNo ratings yet
- DE Sem 6 ReportDocument26 pagesDE Sem 6 ReportKotadia ShivamNo ratings yet
- IRJET Research On Clutchless Quick GearDocument3 pagesIRJET Research On Clutchless Quick Gearscdindar3838No ratings yet
- 111 Study NCDocument8 pages111 Study NCARUN VNo ratings yet
- Energies 15 08260 v3Document39 pagesEnergies 15 08260 v313.ธนดล กองธรรมNo ratings yet
- Automatic Side Stand SynopsisDocument5 pagesAutomatic Side Stand SynopsisRaja ManeNo ratings yet
- Esgin Skaboard PDFDocument11 pagesEsgin Skaboard PDFJimmy Joel ColqueNo ratings yet
- Hill Station Breaking SystemDocument48 pagesHill Station Breaking Systemkanchan bone80% (5)
- Indication of Brake Failure by Using IR SensorDocument3 pagesIndication of Brake Failure by Using IR SensormahendranNo ratings yet
- Prototyping of Mini CNC Milling Machine Using MicrocontrollerDocument12 pagesPrototyping of Mini CNC Milling Machine Using MicrocontrollerAye Chan AungNo ratings yet
- Automatic Multilevel Car Parking & Controlling System Using PLCDocument3 pagesAutomatic Multilevel Car Parking & Controlling System Using PLCAnonymous kw8Yrp0R5r0% (1)
- Design and Analysis of Four Wheel Drive Electric VehicleDocument7 pagesDesign and Analysis of Four Wheel Drive Electric VehicleIJRASETPublicationsNo ratings yet
- Irjet V7i10282Document4 pagesIrjet V7i10282scdindar3838No ratings yet
- Keys To: "Mechatronics Made Easy"Document4 pagesKeys To: "Mechatronics Made Easy"Diego Sanmiguel VillacresesNo ratings yet
- "Automatic Sliding Gate": Prajakta Desai, Iptesam Aga, Arti Patil, Jeba WathareDocument6 pages"Automatic Sliding Gate": Prajakta Desai, Iptesam Aga, Arti Patil, Jeba WathareDeepika AndraNo ratings yet
- AEN Micro ProjectDocument11 pagesAEN Micro Projectvedantbakal043No ratings yet
- Seminar ReportDocument39 pagesSeminar Reportmrvishnuraj1999No ratings yet
- Design and Simulation of Drive Train For An Electric Two VehicleDocument25 pagesDesign and Simulation of Drive Train For An Electric Two VehiclekunalNo ratings yet
- Servomotor: Servo MotorDocument4 pagesServomotor: Servo MotorAngel AventedorNo ratings yet
- Automatic Clutch & Braking SystemDocument3 pagesAutomatic Clutch & Braking Systemieee4mybusinessonlyNo ratings yet
- A Comparative Study On Automatic Gear Shift in Motor-CycleDocument7 pagesA Comparative Study On Automatic Gear Shift in Motor-CycleIJRASETPublicationsNo ratings yet
- S-90 Go KartDocument70 pagesS-90 Go KartTodLee GamingNo ratings yet
- Design Optimization and Analysis of An Outer-Rotor Direct-Drive Permanent-Magnet Motor For Medium-Speed Electric VehicleDocument19 pagesDesign Optimization and Analysis of An Outer-Rotor Direct-Drive Permanent-Magnet Motor For Medium-Speed Electric VehicleARUN KUMARNo ratings yet
- Solar InteligentDocument37 pagesSolar InteligentPrekshitha NNo ratings yet
- Synopsis BLDCDocument3 pagesSynopsis BLDCPawan_Kushwaha_6648No ratings yet
- Design and Development of Automatic Pneumatic Bumper SystemDocument6 pagesDesign and Development of Automatic Pneumatic Bumper SystemSahaya robin singh MNo ratings yet
- Car Parking With 90° RotationDocument10 pagesCar Parking With 90° RotationIJRASETPublicationsNo ratings yet
- Design of Arduino Driven Gearbox: ISSN: 2454-132X Impact Factor: 4.295Document4 pagesDesign of Arduino Driven Gearbox: ISSN: 2454-132X Impact Factor: 4.295NelsonNo ratings yet
- DC Motor Research PaperDocument7 pagesDC Motor Research Papervshyrpznd100% (1)
- Bosch Automotive Electrics and Automotive Electronics: Systems and Components, Networking and Hybrid DriveFrom EverandBosch Automotive Electrics and Automotive Electronics: Systems and Components, Networking and Hybrid DriveRobert Bosch GmbHNo ratings yet
- 5TH SemDocument1 page5TH SemAbhyudayNo ratings yet
- Evaluation SheetDocument8 pagesEvaluation SheetAbhyudayNo ratings yet
- InternshipDocument3 pagesInternshipAbhyudayNo ratings yet
- Additive Manufacturing Module 4 PDFDocument151 pagesAdditive Manufacturing Module 4 PDFNarendra PrabhuNo ratings yet
- Alps Touchpad On Dell How Do I Install The DKMS Driver To EnablDocument4 pagesAlps Touchpad On Dell How Do I Install The DKMS Driver To EnablzennroNo ratings yet
- Damodara-Stotram Tamil PDF File5058Document3 pagesDamodara-Stotram Tamil PDF File5058Jeans CircuitsNo ratings yet
- Chapter 1,2,3Document33 pagesChapter 1,2,3Arklon N. PerezNo ratings yet
- Modeling and Control of A DC Upset Resistance Butt Welding ProcessDocument6 pagesModeling and Control of A DC Upset Resistance Butt Welding ProcessEmre TaşkıranNo ratings yet
- Mark Scheme (Standardisation) January 2022Document21 pagesMark Scheme (Standardisation) January 2022watkeNo ratings yet
- APP158Document11 pagesAPP158danielchoi108No ratings yet
- User's Manual: Wound Composite Modeler For AbaqusDocument45 pagesUser's Manual: Wound Composite Modeler For AbaqusMaikson TonattoNo ratings yet
- 78 THERMOMETER CHEMICAL - 10c+100 DEG CDocument1 page78 THERMOMETER CHEMICAL - 10c+100 DEG Czulfadli zainalNo ratings yet
- 358 - EC8652 Wireless Communication - Anna University 2017 Regulation SyllabusDocument2 pages358 - EC8652 Wireless Communication - Anna University 2017 Regulation SyllabusArun KumarNo ratings yet
- CV Patrick Lemmens English 2Document2 pagesCV Patrick Lemmens English 2Patrick LemmensNo ratings yet
- Edp 1Document30 pagesEdp 1Nethaji sptNo ratings yet
- OM3 CH 18 Project ManagementDocument24 pagesOM3 CH 18 Project ManagementGanessa RolandNo ratings yet
- Homework5 F11 ECON110Document2 pagesHomework5 F11 ECON110James GiangrandeNo ratings yet
- Glycol Dehydration Unit English A4 PDFDocument4 pagesGlycol Dehydration Unit English A4 PDFM Luthfi JundiaturridwanNo ratings yet
- Chapter 1 - Mechanical WavesDocument66 pagesChapter 1 - Mechanical Wavesjaymart villartaNo ratings yet
- Neuro-Rehabilitation: Australian ExperienceDocument31 pagesNeuro-Rehabilitation: Australian ExperienceLavisha SharmaNo ratings yet
- HPLC Sesquiterpen Lacton PDFDocument7 pagesHPLC Sesquiterpen Lacton PDFNurul Mukhlisa AmirNo ratings yet
- Ni6hant Lenovo Laptop PricesDocument29 pagesNi6hant Lenovo Laptop PricesRinith RajendiraprasadNo ratings yet
- Political Imaginaries of Small Cinemas and CulturesDocument12 pagesPolitical Imaginaries of Small Cinemas and CulturesmentamentaNo ratings yet
- CPP CheatsheetDocument10 pagesCPP CheatsheetPrakash GavelNo ratings yet
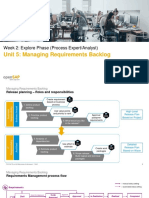
- Unit 5: Managing Requirements Backlog: Week 2: Explore Phase (Process Expert/Analyst)Document10 pagesUnit 5: Managing Requirements Backlog: Week 2: Explore Phase (Process Expert/Analyst)Oralia RomeroNo ratings yet