You might also like
- Non Conventional Energy SystemsDocument52 pagesNon Conventional Energy SystemsRAMA RAJU PYDINo ratings yet
- Experiment 8 Transformer Equivalent CircuitDocument9 pagesExperiment 8 Transformer Equivalent CircuitBrett GallNo ratings yet
- Measurement and Instrumentation Lab 1Document10 pagesMeasurement and Instrumentation Lab 1Mompati Letsweletse100% (1)
- Lab Name: Demonstration and Operation of 5KW Steam Power PlantDocument14 pagesLab Name: Demonstration and Operation of 5KW Steam Power PlantFarhan EdwinNo ratings yet
- Weld Map & NDE Extent of Pressure VesselDocument32 pagesWeld Map & NDE Extent of Pressure VesselMahesh Kumar100% (2)
- Design of A Bladeless Wind TurbineDocument5 pagesDesign of A Bladeless Wind TurbineJosafatNo ratings yet
- Coil Selection ReportDocument1 pageCoil Selection ReportMohsin Shaikh100% (1)
- Problems On PsychrometricsDocument2 pagesProblems On PsychrometricsSudhir KulkarniNo ratings yet
- Vindur Top Operating Manual PDFDocument358 pagesVindur Top Operating Manual PDFfarmasi rsbsaNo ratings yet
- Power Plant Engineering Course Material (As Per OU Syllabus)Document90 pagesPower Plant Engineering Course Material (As Per OU Syllabus)m udaya kumarNo ratings yet
- RacDocument36 pagesRacm_er100No ratings yet
- Presentation 4 - Cooling Towers & DryersDocument18 pagesPresentation 4 - Cooling Towers & DryersdaanNo ratings yet
- Design, Fabrication and Testing of Human Powered Water PurifierDocument8 pagesDesign, Fabrication and Testing of Human Powered Water PurifierIJRASETPublicationsNo ratings yet
- Project Study 2Document41 pagesProject Study 2James AlcariaNo ratings yet
- Accu FcuDocument2 pagesAccu FcuKuzin09No ratings yet
- XSteam Excel v2.6Document11 pagesXSteam Excel v2.6Karen Piñeros GonzalezNo ratings yet
- Instrumentations / Energy Conversion / Others: Moving-Iron InstrumentDocument9 pagesInstrumentations / Energy Conversion / Others: Moving-Iron InstrumentJermaine Lachica100% (1)
- Jet Nozzles DUKDocument14 pagesJet Nozzles DUKKerx EndranoNo ratings yet
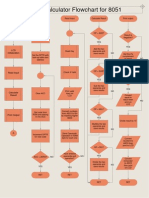
- Calculator Flowchart 8051Document1 pageCalculator Flowchart 8051Dwiky ErlanggaNo ratings yet
- Heat and Mass TransfgerDocument15 pagesHeat and Mass TransfgerPeeyushiRaghavNo ratings yet
- Heat Engine, Pump, RefrigeratorDocument31 pagesHeat Engine, Pump, RefrigeratorChanna BrarNo ratings yet
- Heat & Mass Transfer: Theory & ApplicationDocument40 pagesHeat & Mass Transfer: Theory & ApplicationSyed Ahmed Raza100% (1)
- Familiarization of Electronic Symbol: Experiment No.1Document12 pagesFamiliarization of Electronic Symbol: Experiment No.1ManuelitoBorjaNo ratings yet
- Shell Mold Casting Is A Metal Casting Process Similar To Sand CastingDocument2 pagesShell Mold Casting Is A Metal Casting Process Similar To Sand Castingria19No ratings yet
- BoardDocument8 pagesBoardJerald ManlangitNo ratings yet
- Single Phase TransformerDocument11 pagesSingle Phase TransformerArijeet MondalNo ratings yet
- Cooling and Heating Load CalculationDocument48 pagesCooling and Heating Load CalculationDaniel YoworldNo ratings yet
- Lab Exercise No. 2 Diode Curves: RocedureDocument4 pagesLab Exercise No. 2 Diode Curves: RocedureJep JepNo ratings yet
- Converting KW Ton To COP or EERDocument2 pagesConverting KW Ton To COP or EERswsw2011No ratings yet
- MDSP DatabankDocument24 pagesMDSP DatabankShapir Binyamin100% (1)
- Fan Selection SheetDocument1 pageFan Selection Sheetsamikhoury83No ratings yet
- Webinar 8 - Combining THERMOFLEX & Application-Specific ProgramsDocument31 pagesWebinar 8 - Combining THERMOFLEX & Application-Specific ProgramsAbd Elrahman UossefNo ratings yet
- ME-1203 Solid Mechanics-EEE (Solved Problem Slide)Document9 pagesME-1203 Solid Mechanics-EEE (Solved Problem Slide)sadfNo ratings yet
- USm Nitjsr MFGDocument33 pagesUSm Nitjsr MFGshaliniNo ratings yet
- Subject: Electrical Machines Conventional Practice QuestionsDocument9 pagesSubject: Electrical Machines Conventional Practice QuestionsPriya SharmaNo ratings yet
- The Modification of Axial Flow Fan Test RigDocument3 pagesThe Modification of Axial Flow Fan Test RigAkash VaghaniNo ratings yet
- Im Trox Compact Controller EasyDocument8 pagesIm Trox Compact Controller EasymichelesmiderleNo ratings yet
- Air Changes in Drying OvenDocument3 pagesAir Changes in Drying OvenWONG TS100% (1)
- ExPeriment 3 - Heat TransferDocument8 pagesExPeriment 3 - Heat TransferUzair MiNo ratings yet
- Refri - Coca-Cola R290 P-T ChartDocument4 pagesRefri - Coca-Cola R290 P-T ChartmanonpomNo ratings yet
- From Wikipedia, The Free Encyclopedia: Process Duct WorkDocument17 pagesFrom Wikipedia, The Free Encyclopedia: Process Duct WorkB DASNo ratings yet
- BTU To HP - BTU To Ton - BTU To KW - Conversion Tables - Aircondlounge PDFDocument9 pagesBTU To HP - BTU To Ton - BTU To KW - Conversion Tables - Aircondlounge PDFSyahrul RamadanNo ratings yet
- EDCDocument178 pagesEDCAjay Kavi100% (1)
- Portable Air Purifier With Air Quality Monitoring SensorDocument4 pagesPortable Air Purifier With Air Quality Monitoring SensorKadek ArisudamaNo ratings yet
- Design and Development of Spur Gear by Using Three Dimensional PrintingDocument3 pagesDesign and Development of Spur Gear by Using Three Dimensional PrintingEditor IJTSRD0% (1)
- Evbare Xdone-2Document42 pagesEvbare Xdone-2Caleb FalcoteloNo ratings yet
- Flow Diagram For DehumidifierDocument2 pagesFlow Diagram For DehumidifieramitbslpawarNo ratings yet
- Fabrication of Cooling Tower: A Thesis (Phase I)Document21 pagesFabrication of Cooling Tower: A Thesis (Phase I)Noorul BabaNo ratings yet
- Development of Chicken De-Feathering Machine PDFDocument6 pagesDevelopment of Chicken De-Feathering Machine PDFStella TchalomNo ratings yet
- Fan Coil UnitsDocument4 pagesFan Coil UnitsAbdul SamadNo ratings yet
- RacDocument26 pagesRacgurunakhale123No ratings yet
- Multipurpose Air Flow Duct PDFDocument11 pagesMultipurpose Air Flow Duct PDFHabtie GetinetNo ratings yet
- Audible Noise ReductionDocument4 pagesAudible Noise ReductionManzoor A. ShaikhNo ratings yet
- NOx Progreso en IngenieriaDocument24 pagesNOx Progreso en IngenieriajuanNo ratings yet
- Lec 3. Centfg - Compressor ExDocument30 pagesLec 3. Centfg - Compressor ExmichaelNo ratings yet
- PNEUMATIC METAL SHEET RevitDocument42 pagesPNEUMATIC METAL SHEET RevitKanagarajanNo ratings yet
- 10.3934 Energy.2021053Document23 pages10.3934 Energy.2021053adelmoNo ratings yet
- Design and Experimental Investigation of Forward Curved, Backward Curved and Radial Blade Impellers of Centrifugal BlowerDocument6 pagesDesign and Experimental Investigation of Forward Curved, Backward Curved and Radial Blade Impellers of Centrifugal BlowerkrishnabrNo ratings yet
- HyperloopDocument8 pagesHyperloopArizap MoltresNo ratings yet
- Small Wind: Planning and Building Successful InstallationsFrom EverandSmall Wind: Planning and Building Successful InstallationsRating: 5 out of 5 stars5/5 (2)
- Calculations of The EFG Tensor in DTN Using GIPAW With CASTEP and QE SoftwareDocument12 pagesCalculations of The EFG Tensor in DTN Using GIPAW With CASTEP and QE SoftwareAllen MNo ratings yet
- Industrial Organization (Theory and Practice) - 184-189Document6 pagesIndustrial Organization (Theory and Practice) - 184-189kurniaNo ratings yet
- Srinivasan Engineering College, Perambalur: Part B Unit IDocument2 pagesSrinivasan Engineering College, Perambalur: Part B Unit IPrabhat SinghNo ratings yet
- Quality For WeldsDocument9 pagesQuality For WeldsArturs StangainisNo ratings yet
- 2.1.2 Pseudocode PDFDocument13 pages2.1.2 Pseudocode PDFBlessed Endibye KanyembaNo ratings yet
- CBCS Revised BCA 5 and 6 Sem-FinalDocument38 pagesCBCS Revised BCA 5 and 6 Sem-FinalIrfan AhmedNo ratings yet
- Synchro CheckDocument4 pagesSynchro CheckAdhyartha KerafNo ratings yet
- Soal B.inggris Paket 3Document9 pagesSoal B.inggris Paket 3sitiNo ratings yet
- Topcon GLS 2200Document2 pagesTopcon GLS 2200asepali005No ratings yet
- Optimal Locations and Sizing of Capacitors For Voltage Stability Enhancement in Distribution SystemsDocument13 pagesOptimal Locations and Sizing of Capacitors For Voltage Stability Enhancement in Distribution Systemsswapna44No ratings yet
- BUshed Pin TypeDocument48 pagesBUshed Pin TypeAkshayNo ratings yet
- ThinkSmart Hub SpecDocument5 pagesThinkSmart Hub SpecJose LopezNo ratings yet
- Understand Concept of Multi-Rate Signal Processing: (Autonomous College Affiliated To University of Mumbai)Document2 pagesUnderstand Concept of Multi-Rate Signal Processing: (Autonomous College Affiliated To University of Mumbai)nicO neeNo ratings yet
- 02a-2 V-Can2 Xlrteh4300g033850Document1 page02a-2 V-Can2 Xlrteh4300g033850Daniel PricopNo ratings yet
- Electrochemistry and Its Applications: © 2008 Brooks/Cole 1Document65 pagesElectrochemistry and Its Applications: © 2008 Brooks/Cole 1Niel Karlo AtienzaNo ratings yet
- Hybrid Nanophotonics: Review of Actual ProblemsDocument68 pagesHybrid Nanophotonics: Review of Actual ProblemsTarun SinghalNo ratings yet
- Lesson 5 Appraising Diagnostic Research StudiesDocument23 pagesLesson 5 Appraising Diagnostic Research StudiesProject MedbooksNo ratings yet
- Denture Base MaterialsDocument117 pagesDenture Base MaterialsLalit KumarNo ratings yet
- 2.8 Weight 2023Document13 pages2.8 Weight 2023Xinpei ShimNo ratings yet
- Family TreeDocument5 pagesFamily Treeddkunkun267No ratings yet
- Latex TutorialDocument27 pagesLatex TutorialSalman AhmadNo ratings yet
- TECNICA 140.1 - 142 TECNICA 1400-1600: Inver TerDocument20 pagesTECNICA 140.1 - 142 TECNICA 1400-1600: Inver TerabdessNo ratings yet
- What Is A Philosophical Problem - HackerDocument12 pagesWhat Is A Philosophical Problem - Hackersnain1No ratings yet
- Enerpac SQD-Series ManualDocument16 pagesEnerpac SQD-Series ManualTitanplyNo ratings yet
- Railway Engineering NotesDocument18 pagesRailway Engineering Notesskalema34100% (1)
- TRM Reb670Document490 pagesTRM Reb670jayapalNo ratings yet
- AristotleDocument126 pagesAristotlenda_naumNo ratings yet
- DDDD (Repaired)Document61 pagesDDDD (Repaired)Phung ba Quoc AnhNo ratings yet
- Service Manual - Amnc09gdba2, Amnc12gdba2Document6 pagesService Manual - Amnc09gdba2, Amnc12gdba2U Kyaw San OoNo ratings yet