You might also like
- Chapter 3 - SizingDocument90 pagesChapter 3 - SizingMesum IrfaniNo ratings yet
- TRB The Climbing Lane Design 104-001Document11 pagesTRB The Climbing Lane Design 104-001ramadan1978No ratings yet
- Rockets and Launch VehiclesDocument21 pagesRockets and Launch VehicleskevinNo ratings yet
- Báo Cáo Seminar IDocument62 pagesBáo Cáo Seminar IQuốc Huy ĐàmNo ratings yet
- Mode The High-Speed Navigation of Road: VehiclesDocument5 pagesMode The High-Speed Navigation of Road: Vehiclesali_raza117No ratings yet
- Rail traction calculation factorsDocument11 pagesRail traction calculation factorsMộcNo ratings yet
- Geotechnical Design of Driven Piles Under Axial Loads: 10.1 Comment On The Nature of The ProblemDocument53 pagesGeotechnical Design of Driven Piles Under Axial Loads: 10.1 Comment On The Nature of The ProblemAndré OliveiraNo ratings yet
- Optimal ControlDocument21 pagesOptimal ControlSyaiful RidzalNo ratings yet
- Acceleration and Some Locomotive ProblemsDocument17 pagesAcceleration and Some Locomotive ProblemsSammy BaranNo ratings yet
- MT99028FUDocument11 pagesMT99028FUmarioNo ratings yet
- Propulsion ResistanceDocument14 pagesPropulsion ResistanceEduardo LopesNo ratings yet
- Propulsion and Resistance Forces Affecting Vehicle MotionDocument15 pagesPropulsion and Resistance Forces Affecting Vehicle MotionAnonymous QiMB2lBCJLNo ratings yet
- CM 3.4 LRFD Culvert Design Loads PDFDocument68 pagesCM 3.4 LRFD Culvert Design Loads PDFJose Barquet TellezNo ratings yet
- Tractive Effort Acceleration and BrakingDocument8 pagesTractive Effort Acceleration and BrakingHanuma ReddyNo ratings yet
- Traction and Tractive ResistancesDocument7 pagesTraction and Tractive Resistancessiddharth ojhaNo ratings yet
- Powering Load Distribution and Braking oDocument5 pagesPowering Load Distribution and Braking oShinta Nur HasanahNo ratings yet
- Laboratory 1 PropulsionDocument4 pagesLaboratory 1 PropulsionCarlos RodríguezNo ratings yet
- Traffic Engineering: University of Duhok College of Engineering Civil Department Fourth Year Students 2020-2021Document14 pagesTraffic Engineering: University of Duhok College of Engineering Civil Department Fourth Year Students 2020-2021Ahmad SalihNo ratings yet
- Engineering Feasibility Study Vehicle Shock Absorption SystemDocument6 pagesEngineering Feasibility Study Vehicle Shock Absorption SystemNelson MukwayaNo ratings yet
- monte carloDocument19 pagesmonte carloChristine Vel MarcianoNo ratings yet
- A Power Presizing Methodology For Electric Vehicle Traction MotorsDocument9 pagesA Power Presizing Methodology For Electric Vehicle Traction MotorsGanesan TNo ratings yet
- Module 1Document11 pagesModule 1trainmankarNo ratings yet
- Design of Small Electric Car: P. Prochazka, I. Pazdera, P. Vorel and D. CervinkaDocument6 pagesDesign of Small Electric Car: P. Prochazka, I. Pazdera, P. Vorel and D. Cervinkashivendra singhNo ratings yet
- External Flow Analysis of A Truck For Drag ReductionDocument5 pagesExternal Flow Analysis of A Truck For Drag Reductionthebird70No ratings yet
- DDW 2Document5 pagesDDW 2celmailNo ratings yet
- Ejemplo de Performance AnalysisDocument10 pagesEjemplo de Performance Analysisjose aguilarNo ratings yet
- Modelling of Locomotive Normal Load: 2. Single ValuesDocument5 pagesModelling of Locomotive Normal Load: 2. Single Valuesbarnibar1No ratings yet
- CP213: Tutorial Notebook 5Document1 pageCP213: Tutorial Notebook 5Bilal AhmadNo ratings yet
- Performance Characteristics of Road Vehicles 1 - NewDocument90 pagesPerformance Characteristics of Road Vehicles 1 - NewDEEPSNo ratings yet
- Calculation of Traction Effort for Switching LocomotiveDocument5 pagesCalculation of Traction Effort for Switching Locomotiveriyyo2424No ratings yet
- Vehicle Dynamics For Racing GamesDocument16 pagesVehicle Dynamics For Racing GamesVijay PawarNo ratings yet
- CHAPTER - 3 HIGHWAY IIDocument54 pagesCHAPTER - 3 HIGHWAY IIIbrahim AbdiNo ratings yet
- Utilisation of Electric Power Electric Traction: Course Code: EE702 Co Ordinator: Dr. Nandita SanyalDocument14 pagesUtilisation of Electric Power Electric Traction: Course Code: EE702 Co Ordinator: Dr. Nandita SanyalAditya PaulNo ratings yet
- Performance Requirement of The Train 1707310663Document10 pagesPerformance Requirement of The Train 1707310663Anubhav Hem Kumar JainNo ratings yet
- How tractor weight affects drawbar pull performanceDocument6 pagesHow tractor weight affects drawbar pull performancearnelcodNo ratings yet
- Placement of Loading Stations For Electric Vehicles: Allowing Small DetoursDocument9 pagesPlacement of Loading Stations For Electric Vehicles: Allowing Small DetoursTejas GhorpadeNo ratings yet
- Metro Train SimulationDocument6 pagesMetro Train SimulationManishNo ratings yet
- 3.4.4 - Calculation of Lift Factor: Subscribe To Deepl Pro To Translate Larger Documents. Visit For More InformationDocument50 pages3.4.4 - Calculation of Lift Factor: Subscribe To Deepl Pro To Translate Larger Documents. Visit For More InformationSanjay SwamiNo ratings yet
- HakTaeLee ATIO2010 FinalDocument13 pagesHakTaeLee ATIO2010 Finalkdastro009No ratings yet
- V-n Diagram ExplainedDocument13 pagesV-n Diagram ExplainedAvinash Singh100% (5)
- Forces that offer resistance to train movementDocument24 pagesForces that offer resistance to train movementMahesh RamtekeNo ratings yet
- Szanto FrankDocument6 pagesSzanto FrankMurugan.SubramaniNo ratings yet
- 3: Track Resistances, Hauling CapacityDocument46 pages3: Track Resistances, Hauling CapacityAastha SoniNo ratings yet
- MSM Lecture 03Document28 pagesMSM Lecture 03RafaelNo ratings yet
- Microcontroller Based Model Design of A Train Collision Avoidance SystemDocument9 pagesMicrocontroller Based Model Design of A Train Collision Avoidance SystemIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Hydrodynamic Transverse Loads On Ships in Deep and Shallow WaterDocument25 pagesHydrodynamic Transverse Loads On Ships in Deep and Shallow WaterJason SmithNo ratings yet
- Railway Engineering and Airport: CE 307 PlanningDocument35 pagesRailway Engineering and Airport: CE 307 Planningama kumarNo ratings yet
- LECT-31 - Traction and Tractive ResistancesDocument18 pagesLECT-31 - Traction and Tractive ResistancesMiran SheikhNo ratings yet
- Tractor Ballasting in Field Work: A. Janulevičius, K. GiedraDocument8 pagesTractor Ballasting in Field Work: A. Janulevičius, K. GiedraTeresaPeraltaCalvilloNo ratings yet
- Aircraft Elevon Actuation System SimulationDocument11 pagesAircraft Elevon Actuation System SimulationAbeer KhatriNo ratings yet
- Transactions of The VŠB - Technical University of OstravaDocument6 pagesTransactions of The VŠB - Technical University of OstravaAli Al-BashaNo ratings yet
- Railways: Railway IntroductionDocument9 pagesRailways: Railway IntroductionIkram ArifNo ratings yet
- Applied Sciences: Wind Turbine Power Curves Based On The Weibull Cumulative Distribution FunctionDocument18 pagesApplied Sciences: Wind Turbine Power Curves Based On The Weibull Cumulative Distribution FunctionmeneeeeeNo ratings yet
- TrainDocument12 pagesTrainTitus GreyNo ratings yet
- Coefficients of Propeller-Hull Interaction in Inland Waterway Vessels PDFDocument8 pagesCoefficients of Propeller-Hull Interaction in Inland Waterway Vessels PDFKalipada SenNo ratings yet
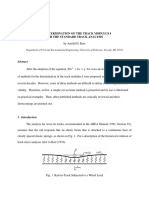
- Track Modulus 1 PDFDocument23 pagesTrack Modulus 1 PDFMarius Diaconu100% (1)
- Load Distribution of Slab To Beams PDFDocument9 pagesLoad Distribution of Slab To Beams PDFShamantha Krishna KNo ratings yet
- Probabilistic Formulation For The Analysis of Bridge Decks With Irregular Pavement SurfaceDocument3 pagesProbabilistic Formulation For The Analysis of Bridge Decks With Irregular Pavement SurfaceJosé Guilherme Santos da SilvaNo ratings yet
- A Simulator Developed For A Twin-Pod AUV, The Marport SQX-500Document6 pagesA Simulator Developed For A Twin-Pod AUV, The Marport SQX-500huy.tranvugia1305No ratings yet
- Transactions of the American Society of Civil Engineers, Vol. LXX, Dec. 1910 Locomotive Performance On Grades Of Various Lengths, Paper No. 1172From EverandTransactions of the American Society of Civil Engineers, Vol. LXX, Dec. 1910 Locomotive Performance On Grades Of Various Lengths, Paper No. 1172No ratings yet
- Check Your CalendarDocument1 pageCheck Your CalendarPbNo ratings yet
- GD&T - A Practical Approach to Dimensional TolerancesDocument122 pagesGD&T - A Practical Approach to Dimensional TolerancesPbNo ratings yet
- The Big Book NoteDocument3 pagesThe Big Book NotePbNo ratings yet
- Chineasy 16Document3 pagesChineasy 16PbNo ratings yet
- Understanding Chinese time phrasesDocument3 pagesUnderstanding Chinese time phrasesPbNo ratings yet
- Rest Body: 'Person' ' E'. Eri Imagining IngDocument3 pagesRest Body: 'Person' ' E'. Eri Imagining IngPbNo ratings yet
- Why Chinese character for two women means 'argumentDocument3 pagesWhy Chinese character for two women means 'argumentPbNo ratings yet
- Plummer Block TutorialDocument21 pagesPlummer Block TutorialHareesha N GNo ratings yet
- Chineasy 15Document3 pagesChineasy 15PbNo ratings yet
- Sunrise SparklesDocument3 pagesSunrise SparklesPbNo ratings yet
- Chineasy 13Document3 pagesChineasy 13PbNo ratings yet
- The Big Book of Watercolor (1985) - 11Document3 pagesThe Big Book of Watercolor (1985) - 11PbNo ratings yet
- Dog (Quan: 6 BU D NGDocument3 pagesDog (Quan: 6 BU D NGPbNo ratings yet
- Chineasy 18Document3 pagesChineasy 18PbNo ratings yet
- Burning Hot (Yan) FlamesDocument3 pagesBurning Hot (Yan) FlamesPbNo ratings yet
- Chineasy 9 PDFDocument3 pagesChineasy 9 PDFPbNo ratings yet
- Chineasy 9 PDFDocument3 pagesChineasy 9 PDFPbNo ratings yet
- Follow: To Follow (O G Crowd HongDocument3 pagesFollow: To Follow (O G Crowd HongPbNo ratings yet
- Shout Quality: To To ReturnDocument3 pagesShout Quality: To To ReturnPbNo ratings yet
- Follow: To Follow (O G Crowd HongDocument3 pagesFollow: To Follow (O G Crowd HongPbNo ratings yet
- Watercolor AN: Painting PracticeDocument3 pagesWatercolor AN: Painting PracticePbNo ratings yet
- The Big Book of Watercolor (1985) - 55 PDFDocument3 pagesThe Big Book of Watercolor (1985) - 55 PDFPbNo ratings yet
- Chinese Character Meanings: Person, Sky, Day, MouthDocument3 pagesChinese Character Meanings: Person, Sky, Day, MouthPbNo ratings yet
- Chinese Character Meanings: Person, Sky, Day, MouthDocument3 pagesChinese Character Meanings: Person, Sky, Day, MouthPbNo ratings yet
- Clouds: Painting SkiesDocument3 pagesClouds: Painting SkiesPbNo ratings yet
- The Big Book of Watercolor (1985) - 56 PDFDocument3 pagesThe Big Book of Watercolor (1985) - 56 PDFPb0% (1)
- The Big Book of Watercolor (1985) - 59 PDFDocument3 pagesThe Big Book of Watercolor (1985) - 59 PDFPbNo ratings yet
- The Big Book of Watercolor (1985) - 60 PDFDocument3 pagesThe Big Book of Watercolor (1985) - 60 PDFPbNo ratings yet
- The Big Book of Watercolor (1985) - 55 PDFDocument3 pagesThe Big Book of Watercolor (1985) - 55 PDFPbNo ratings yet
- The Big Book of Watercolor (1985) - 58 PDFDocument3 pagesThe Big Book of Watercolor (1985) - 58 PDFPbNo ratings yet
- Talk Natural Vs Social 20151013 PDFDocument13 pagesTalk Natural Vs Social 20151013 PDFDaniel AdrianoNo ratings yet
- BIOCON RESEARCH XRD ANALYSISDocument86 pagesBIOCON RESEARCH XRD ANALYSISSwathi GururajNo ratings yet
- NaCl Recrystallization PurificationDocument12 pagesNaCl Recrystallization PurificationLevina Arastika50% (4)
- Hibbeler, Mechanics of Materials-Deflections 1Document57 pagesHibbeler, Mechanics of Materials-Deflections 1poom2007No ratings yet
- Transport4 - High Electric Fields - Velocity SaturationDocument16 pagesTransport4 - High Electric Fields - Velocity SaturationMạnh Huy BùiNo ratings yet
- Lec 1 Design of RC Structures For Lateral LoadsDocument49 pagesLec 1 Design of RC Structures For Lateral Loadsamin alzuraiki100% (1)
- 2 Drilling PipesDocument82 pages2 Drilling Pipesdf_campos3353No ratings yet
- STD 9 Test On Sound 16 Feb 2024 - StudentDocument4 pagesSTD 9 Test On Sound 16 Feb 2024 - Studentbavanthbalasubramanian.stuNo ratings yet
- Lecture 1 Semiconductor TheoryDocument31 pagesLecture 1 Semiconductor TheorySibisi SinethembaNo ratings yet
- Advanced Materials for CommunicationsDocument5 pagesAdvanced Materials for CommunicationsLeoNo ratings yet
- Neet 2022 GanganagarDocument30 pagesNeet 2022 GanganagarSarthakNo ratings yet
- The Magnetic Property of An Atom and Atoms Atomic OrbitalsDocument12 pagesThe Magnetic Property of An Atom and Atoms Atomic OrbitalsJanne Lorraine Garcia-EleazarNo ratings yet
- 2.mechanical SealsDocument45 pages2.mechanical Sealspsk.pranesh5520No ratings yet
- Jurong Junior College: Physics 9646/2Document22 pagesJurong Junior College: Physics 9646/2Chen ZhihaoNo ratings yet
- Einstein Fields EquationsDocument23 pagesEinstein Fields Equationsdendi231No ratings yet
- Hm2 HomeworkDocument2 pagesHm2 HomeworkMartin DarmasetiawanNo ratings yet
- Hydrostatic ForcesDocument27 pagesHydrostatic ForcesSumit SahrawatNo ratings yet
- TorsionDocument12 pagesTorsionredz00No ratings yet
- Experiment 3thermodynamic Functions and Solubility Product of Barium NitrateDocument9 pagesExperiment 3thermodynamic Functions and Solubility Product of Barium NitrateMay LeeNo ratings yet
- Week 2 of Aqs110 Fluid Mechanics PDFDocument9 pagesWeek 2 of Aqs110 Fluid Mechanics PDFDhayane Redoquerio AquinoNo ratings yet
- Geotextile reinforced embankment simulationDocument16 pagesGeotextile reinforced embankment simulationAndres Flores BaezNo ratings yet
- MechanicsDocument47 pagesMechanicshitesh81No ratings yet
- Equipment Lab4 BBL - BoilerType2Document917 pagesEquipment Lab4 BBL - BoilerType2umairsaleem606No ratings yet
- Problem Sheet 1 PDFDocument4 pagesProblem Sheet 1 PDFJeff HardyNo ratings yet
- PhosphateDocument18 pagesPhosphatejaykotak12345100% (8)
- Beam Column - IS 800Document2 pagesBeam Column - IS 800parishith0% (1)
- Daniel Neuhauser and Roi Baer - A Two-Grid Time-Dependent Formalism For The Maxwell EquationDocument10 pagesDaniel Neuhauser and Roi Baer - A Two-Grid Time-Dependent Formalism For The Maxwell EquationPrem_SwiftNo ratings yet
- Assignment 2Document4 pagesAssignment 2blackbeauty14No ratings yet
- Map The MaticsDocument1 pageMap The Maticsfcc3No ratings yet
- Shooting Method 6 PDFDocument11 pagesShooting Method 6 PDFمرتضى عباسNo ratings yet