You might also like
- Beams and Framed Structures: Structures and Solid Body MechanicsFrom EverandBeams and Framed Structures: Structures and Solid Body MechanicsRating: 3 out of 5 stars3/5 (2)
- Tutorial 1 Topic: Vibration BNJ 20303 Mechanic of Machine SEMESTER 1 SESI 2020/2021Document6 pagesTutorial 1 Topic: Vibration BNJ 20303 Mechanic of Machine SEMESTER 1 SESI 2020/2021Jojnojie DannyzNo ratings yet
- Limitation Imposed On Structural DesignerDocument2 pagesLimitation Imposed On Structural DesignerdvarsastryNo ratings yet
- 6 Problemsgroup 2Document8 pages6 Problemsgroup 2Alhji AhmedNo ratings yet
- Mechanical Vibrations Chapter ExercisesDocument15 pagesMechanical Vibrations Chapter ExercisesMohammed Al HelaylNo ratings yet
- Heat and Mass TransferDocument69 pagesHeat and Mass Transfervh11113mech21No ratings yet
- 4 Problemsgroup 1Document11 pages4 Problemsgroup 1Alhji AhmedNo ratings yet
- Lecture 14Document34 pagesLecture 14yakwetuNo ratings yet
- Measuring Spring Stiffness and Natural FrequencyDocument60 pagesMeasuring Spring Stiffness and Natural FrequencyRobert Lau Yik SiangNo ratings yet
- Structural Dynamics QuestionsDocument4 pagesStructural Dynamics Questionsu2b11517No ratings yet
- Structural Dynamics Equations of MotionDocument3 pagesStructural Dynamics Equations of Motionarchan_daveNo ratings yet
- IIT Madras CE 5320 Soil Dynamics Assignment 4 SDOF & MDOF ModelsDocument3 pagesIIT Madras CE 5320 Soil Dynamics Assignment 4 SDOF & MDOF Modelssayan mukherjeeNo ratings yet
- Hooke's LawDocument5 pagesHooke's LawDanelle EsparteroNo ratings yet
- Vibration of Two Degree of Freedom Systems Solved ProblemsDocument17 pagesVibration of Two Degree of Freedom Systems Solved ProblemsDevananda R SNo ratings yet
- Tutorial #1: Solving Vibration ProblemsDocument3 pagesTutorial #1: Solving Vibration ProblemsthelightrayNo ratings yet
- Chapter-Ii Introduction To ModellingDocument50 pagesChapter-Ii Introduction To ModellingAHMEDNo ratings yet
- Analysis of Tapered Beam Piezoelectric Energy HarvestersDocument4 pagesAnalysis of Tapered Beam Piezoelectric Energy HarvestersshikhamaharanaNo ratings yet
- Damping and Spring Elements in Vibration AnalysisDocument51 pagesDamping and Spring Elements in Vibration Analysisይታገሡ ተሥፋዬNo ratings yet
- EGGN 350: MEL II Helical Springs Lab ResultsDocument11 pagesEGGN 350: MEL II Helical Springs Lab ResultsHeather TatNo ratings yet
- EM - ES.5: Experiment No. (1) Simple Pendulum 1.1 ObjectiveDocument41 pagesEM - ES.5: Experiment No. (1) Simple Pendulum 1.1 ObjectivehasoonyaliNo ratings yet
- Chapter 13 Multidegree of Freedom Systems: M K Are Mass and Stiffness Matrix Respectfully. Premultiplying MDocument15 pagesChapter 13 Multidegree of Freedom Systems: M K Are Mass and Stiffness Matrix Respectfully. Premultiplying Mkaruna141990No ratings yet
- PDF Dynamic Analysis of StructuresDocument43 pagesPDF Dynamic Analysis of StructuresChegue BureNo ratings yet
- 16 Marks TovDocument13 pages16 Marks TovrenjithrenjuNo ratings yet
- Model Question Solution Key PointsDocument22 pagesModel Question Solution Key PointsKrishna ShahNo ratings yet
- FVM SANDWICH BEAMDocument39 pagesFVM SANDWICH BEAMLaksh ManNo ratings yet
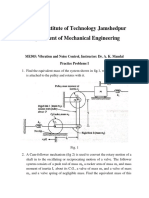
- ME34ME505 - Vibration and Noise ControlPractice Problems IDocument20 pagesME34ME505 - Vibration and Noise ControlPractice Problems IMUHAMMAD ASJAD AAMIR AAMIR AMINNo ratings yet
- physicsHL IADocument15 pagesphysicsHL IAAziz Samet ZorluNo ratings yet
- Chapter 9 RotationDocument7 pagesChapter 9 RotationHana Lee Jorel ZekeNo ratings yet
- ENGR0135 Homework #1 Statics and Mechanics of MaterialsDocument4 pagesENGR0135 Homework #1 Statics and Mechanics of MaterialsAbdulazeez AbiolaNo ratings yet
- Coimisiún Na Scrúduithe Stáit State Examinations Commission: Eaving Ertificate XaminationDocument12 pagesCoimisiún Na Scrúduithe Stáit State Examinations Commission: Eaving Ertificate Xaminationfrank mutaleNo ratings yet
- Coimisiún Na Scrúduithe Stáit State Examinations Commission: Eaving Ertificate XaminationDocument12 pagesCoimisiún Na Scrúduithe Stáit State Examinations Commission: Eaving Ertificate Xaminationfrank mutaleNo ratings yet
- Vib104 HW1Document5 pagesVib104 HW1Tai-Yuan HsuNo ratings yet
- NUST dynamics coursework on spring oscillationsDocument6 pagesNUST dynamics coursework on spring oscillationsMunyaradzi MwananziNo ratings yet
- KCT MODEL EXAM ENGINEERING MECHANICSDocument4 pagesKCT MODEL EXAM ENGINEERING MECHANICSArunGopal PonnusamyNo ratings yet
- ROTATING MASSES BALANCINGDocument25 pagesROTATING MASSES BALANCINGEngineering DesignNo ratings yet
- Sherif1991 PDFDocument14 pagesSherif1991 PDFAnderson Steven Pena SabogalNo ratings yet
- Module 3 With SolutionsDocument31 pagesModule 3 With SolutionsGovind GauravNo ratings yet
- Step 1: Mathematical Modeling: 1 Vibration Analysis ProcedureDocument22 pagesStep 1: Mathematical Modeling: 1 Vibration Analysis ProcedureNirmal JayanthNo ratings yet
- Tutorial 1Document4 pagesTutorial 1Aaditya BhandariNo ratings yet
- Questions 91 1 PDFDocument5 pagesQuestions 91 1 PDFMoj JamaranNo ratings yet
- Multiple Degrees of FreedomDocument44 pagesMultiple Degrees of FreedomShafiq Ahmed Shahbaz100% (1)
- Drill-10 - Engineering MechanicsDocument24 pagesDrill-10 - Engineering MechanicsTine AbellanosaNo ratings yet
- Assignment #1 Analyzes Column BucklingDocument22 pagesAssignment #1 Analyzes Column BucklingOneil Prettyboyswagg LeitchNo ratings yet
- 5826Document6 pages5826zubbbuNo ratings yet
- Dynamic Systems 334 (308814 v1) End of Semester 1 Examinations, June 2007Document12 pagesDynamic Systems 334 (308814 v1) End of Semester 1 Examinations, June 2007Jill Dagreat100% (1)
- Sheet of Problems in Vibration Prepared byDocument38 pagesSheet of Problems in Vibration Prepared byاحمد الربيعيNo ratings yet
- Static's Lecture 1-5 2Document121 pagesStatic's Lecture 1-5 2HaadS.AbbasiNo ratings yet
- Section A Physics Paper 1 Mechanics Revision Questions For A Level With AnswersDocument120 pagesSection A Physics Paper 1 Mechanics Revision Questions For A Level With Answersakramkaweesi7No ratings yet
- NIT Tiruchirappalli Geotechnical Engineering AssignmentDocument6 pagesNIT Tiruchirappalli Geotechnical Engineering AssignmentAmbu DeviNo ratings yet
- Question Paper Set2 Aeronautical Engineering An14 703 - Vibration and Aero ElasticityDocument3 pagesQuestion Paper Set2 Aeronautical Engineering An14 703 - Vibration and Aero ElasticityJohny GeorgeNo ratings yet
- Modeling Material Damping Properties in AnsysDocument16 pagesModeling Material Damping Properties in AnsysNono_geotec100% (1)
- ME3103 endSEM 2021Document2 pagesME3103 endSEM 2021Priyojit GhoshNo ratings yet
- Vibrations HW CH 1-4Document33 pagesVibrations HW CH 1-4osullivryan67% (3)
- Strength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresFrom EverandStrength of Materials and Structures: An Introduction to the Mechanics of Solids and StructuresRating: 4 out of 5 stars4/5 (1)
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- Lineapelle: Leather & Non-LeatherDocument16 pagesLineapelle: Leather & Non-LeatherShikha BhartiNo ratings yet
- Daily Assessment RecordDocument4 pagesDaily Assessment Recordapi-342236522100% (2)
- European Business in China Position Paper 2017 2018 (English Version)Document408 pagesEuropean Business in China Position Paper 2017 2018 (English Version)Prasanth RajuNo ratings yet
- Early Diabetic Risk Prediction Using Machine Learning Classification TechniquesDocument6 pagesEarly Diabetic Risk Prediction Using Machine Learning Classification TechniquesInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Final Annotated BibiliographyDocument4 pagesFinal Annotated Bibiliographyapi-491166748No ratings yet
- Mind Map On The History of Science, Technology and SocietyDocument1 pageMind Map On The History of Science, Technology and SocietyJohn Michael Vincent CarreonNo ratings yet
- POPULARITY OF CREDIT CARDS ISSUED BY DIFFERENT BANKSDocument25 pagesPOPULARITY OF CREDIT CARDS ISSUED BY DIFFERENT BANKSNaveed Karim Baksh75% (8)
- Ahu, Chiller, Fcu Technical Bid TabulationDocument15 pagesAhu, Chiller, Fcu Technical Bid TabulationJohn Henry AsuncionNo ratings yet
- Angelomorphic Christology and The Book of Revelation - Matthias Reinhard HoffmannDocument374 pagesAngelomorphic Christology and The Book of Revelation - Matthias Reinhard HoffmannEusebius325100% (2)
- DNA Affirmative - MSDI 2015Document146 pagesDNA Affirmative - MSDI 2015Michael TangNo ratings yet
- PrintDocument18 pagesPrintHookandcrookNo ratings yet
- BOQ - Hearts & Arrows Office 04sep2023Document15 pagesBOQ - Hearts & Arrows Office 04sep2023ChristianNo ratings yet
- Lecture 29: Curl, Divergence and FluxDocument2 pagesLecture 29: Curl, Divergence and FluxKen LimoNo ratings yet
- Barelwiyah, Barelvi Chapter 1 (Part 2 of 5)Document31 pagesBarelwiyah, Barelvi Chapter 1 (Part 2 of 5)Dawah ChannelNo ratings yet
- Presentation of Urban RegenerationsDocument23 pagesPresentation of Urban RegenerationsRafiuddin RoslanNo ratings yet
- TILE FIXING GUIDEDocument1 pageTILE FIXING GUIDEStavros ApostolidisNo ratings yet
- Boala Cronica Obstructive: BpocDocument21 pagesBoala Cronica Obstructive: BpocNicoleta IliescuNo ratings yet
- PiXL Knowledge Test ANSWERS - AQA B1 CORE Science - Legacy (2016 and 2017)Document12 pagesPiXL Knowledge Test ANSWERS - AQA B1 CORE Science - Legacy (2016 and 2017)Mrs S BakerNo ratings yet
- Rotational Equilibrium SimulationDocument3 pagesRotational Equilibrium SimulationCamille ManlongatNo ratings yet
- Scientology Abridged Dictionary 1973Document21 pagesScientology Abridged Dictionary 1973Cristiano Manzzini100% (2)
- K230F Equipment ManualsDocument166 pagesK230F Equipment ManualsHui ChenNo ratings yet
- Environmental Threats Differentiated Reading Comprehension Ver 1Document20 pagesEnvironmental Threats Differentiated Reading Comprehension Ver 1Camila DiasNo ratings yet
- Business StrategiesDocument2 pagesBusiness Strategiesthristanlexter694No ratings yet
- Mad LabDocument66 pagesMad LabBalamurugan MNo ratings yet
- GKInvest Market ReviewDocument66 pagesGKInvest Market ReviewjhonxracNo ratings yet
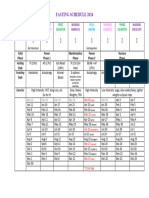
- Moon Fast Schedule 2024Document1 pageMoon Fast Schedule 2024mimiemendoza18No ratings yet
- Jotrun TDSDocument4 pagesJotrun TDSBiju_PottayilNo ratings yet
- Galambos 1986Document18 pagesGalambos 1986gcoNo ratings yet
- Analysis and Design of Multi Storey Building by Using STAAD ProDocument5 pagesAnalysis and Design of Multi Storey Building by Using STAAD Prolikith rockNo ratings yet
- Lesson Plan 2 Revised - Morgan LegrandDocument19 pagesLesson Plan 2 Revised - Morgan Legrandapi-540805523No ratings yet