You might also like
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- En CD00003897 PDFDocument7 pagesEn CD00003897 PDFJosias AndradeNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- A 32nm Tunnel FET SRAM For Ultra Low LeakageDocument4 pagesA 32nm Tunnel FET SRAM For Ultra Low LeakageNITHINNo ratings yet
- Organic Light-Emitting Transistors: Towards the Next Generation Display TechnologyFrom EverandOrganic Light-Emitting Transistors: Towards the Next Generation Display TechnologyNo ratings yet
- 86 A Grid Dip Oscillator: 1. It Has A Frequency Range of 1.6 To 35.2 MHZ in Four Ranges Using A Set ofDocument7 pages86 A Grid Dip Oscillator: 1. It Has A Frequency Range of 1.6 To 35.2 MHZ in Four Ranges Using A Set ofMauro MarafonNo ratings yet
- EMC Design GuidelinesDocument6 pagesEMC Design Guidelinessenkum812002No ratings yet
- Class D Amplifier PDFDocument7 pagesClass D Amplifier PDFHoracio Dorantes ReyesNo ratings yet
- An 4160Document8 pagesAn 4160aurumstar2000No ratings yet
- DP83865 Gig PHYTER V 10/100/1000 Ethernet Physical Layer Design GuideDocument8 pagesDP83865 Gig PHYTER V 10/100/1000 Ethernet Physical Layer Design GuideUseful Videos DevotionalNo ratings yet
- Ground Fault Protection PaperDocument4 pagesGround Fault Protection PaperAbhishek ParmarNo ratings yet
- 5.8Ghz Circularly Polarized Rectennas Using Schottky Diode and Ltc5535 Rectifier For RF Energy HarvestingDocument4 pages5.8Ghz Circularly Polarized Rectennas Using Schottky Diode and Ltc5535 Rectifier For RF Energy HarvestingNag ChallaNo ratings yet
- Cheesemd 2Document7 pagesCheesemd 2Guillermo Gómez MiñonesNo ratings yet
- Agilent Manual 34972ADocument34 pagesAgilent Manual 34972AValério Lucas GonçalvesNo ratings yet
- Lect 4Document10 pagesLect 4ngupta999No ratings yet
- Lab 4 Directional CouplerDocument10 pagesLab 4 Directional Couplernurin runNo ratings yet
- Lectura 3 M PDFDocument12 pagesLectura 3 M PDFFlakita S MelcOchitaNo ratings yet
- Design and Simulation of A Two Stage OPAMPDocument4 pagesDesign and Simulation of A Two Stage OPAMPAbd TashNo ratings yet
- Microwave CommunicationsDocument6 pagesMicrowave CommunicationsAkhil AhmedNo ratings yet
- Design and Analysis of A Symmetric Phase Locked Loop For Low Frequencies in 180 NM TechnologyDocument6 pagesDesign and Analysis of A Symmetric Phase Locked Loop For Low Frequencies in 180 NM TechnologyRahul YadavNo ratings yet
- (Assignment No: 4 & 5) Summation Date: 2074/11/25Document1 page(Assignment No: 4 & 5) Summation Date: 2074/11/25Binod KafleNo ratings yet
- Prospects of IGCT Technology: High Power SemiconductorsDocument3 pagesProspects of IGCT Technology: High Power SemiconductorspjacqmaeNo ratings yet
- An0002 Efm32 Hardware Design ConsiderationsDocument16 pagesAn0002 Efm32 Hardware Design ConsiderationsRam SakthiNo ratings yet
- Design of An Optoelectronic State Machine With Integrated BDD Based Optical LogicDocument3 pagesDesign of An Optoelectronic State Machine With Integrated BDD Based Optical Logicayush685cheetahNo ratings yet
- Transformer Insulation Advantage of Single-Pair-EthernetDocument7 pagesTransformer Insulation Advantage of Single-Pair-EthernetAndrey MelsNo ratings yet
- Design of A 3-Phase MOSFET Inverter by Lovatt H PDFDocument5 pagesDesign of A 3-Phase MOSFET Inverter by Lovatt H PDFJoshua Immanuel GaniNo ratings yet
- Direct Torque Control of Induction Motors With Fuzzy Logic ControllerDocument6 pagesDirect Torque Control of Induction Motors With Fuzzy Logic ControllerDurgaprasad MadamsettyNo ratings yet
- A Fully Differential Switched-Current Delta-Sigma Modulator Using Single 3.347 Power-Supply VoltageDocument4 pagesA Fully Differential Switched-Current Delta-Sigma Modulator Using Single 3.347 Power-Supply VoltageRamakrishnaVakulabharanamNo ratings yet
- Qs & As Class I+IIDocument9 pagesQs & As Class I+IIphyoNo ratings yet
- Phototransistor Switching Time Analysis: Output WaveformsDocument8 pagesPhototransistor Switching Time Analysis: Output WaveformsklklkNo ratings yet
- A 13nV HZ 4.5W Chopper Instrumentation Amplifier With Robust Ripple Reduction and Input Impedance Boosting TechniquesDocument5 pagesA 13nV HZ 4.5W Chopper Instrumentation Amplifier With Robust Ripple Reduction and Input Impedance Boosting TechniquesRizwan Shaik PeerlaNo ratings yet
- Digitally Controlled Oscillator ReportDocument18 pagesDigitally Controlled Oscillator ReportVinidhra ShivakumarNo ratings yet
- How To Drive Mosfets and Igbts Into The 21St Century: IXAN0009Document28 pagesHow To Drive Mosfets and Igbts Into The 21St Century: IXAN0009mmNo ratings yet
- Pulse-Forming Networks: in Order To Circumvent These Disadvantages, Lumped Constant NetworksDocument18 pagesPulse-Forming Networks: in Order To Circumvent These Disadvantages, Lumped Constant NetworksМилица МијатовићNo ratings yet
- DTMF Receiver For Telephones: BU8874 / BU8874FDocument10 pagesDTMF Receiver For Telephones: BU8874 / BU8874FYazan HaidarNo ratings yet
- Open Ended 1Document12 pagesOpen Ended 1AneeshaNo ratings yet
- Optimizing Read Range in RFID Systems: DesignfeatureDocument7 pagesOptimizing Read Range in RFID Systems: DesignfeaturePrajeesh RaviNo ratings yet
- An Introduction To Telephone Line Interfacing Using The PIC Micro ControllerDocument46 pagesAn Introduction To Telephone Line Interfacing Using The PIC Micro Controllerayaz_shiraziNo ratings yet
- PWR Bal CalDocument36 pagesPWR Bal Calarijeetdguy3051No ratings yet
- Active Ferrite Rod AntennaDocument9 pagesActive Ferrite Rod AntennaFernandoMilaneziNo ratings yet
- المحاضرة الثانية (بور الكترونيك) دراسات انسانيةDocument9 pagesالمحاضرة الثانية (بور الكترونيك) دراسات انسانيةHussam Noman AlAnssaryNo ratings yet
- Power Harvester Design For Semi-Passive UHF RFID Tag Using A Tunable Impedance TransformationDocument5 pagesPower Harvester Design For Semi-Passive UHF RFID Tag Using A Tunable Impedance TransformationM ANo ratings yet
- Ofc Lab Manual 2Document21 pagesOfc Lab Manual 2Shobhit JainNo ratings yet
- An436 Application NoteDocument9 pagesAn436 Application NoteEdgar MuñozNo ratings yet
- Project 1 FullDocument10 pagesProject 1 FullSaratul AkmaNo ratings yet
- Analytical Comparison of Predistorter Circuits For DS-CDMA PADocument5 pagesAnalytical Comparison of Predistorter Circuits For DS-CDMA PAInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Alarm CircuitDocument29 pagesAlarm CircuitAnkit baghelNo ratings yet
- Application Aspects: Section 5Document27 pagesApplication Aspects: Section 5Mohammed Raif MelhimNo ratings yet
- Power Transformer DesignDocument4 pagesPower Transformer DesignMetalloyNo ratings yet
- A Low-Cost Surface Mount PIN Diode Attenuator: Application Note 1048Document6 pagesA Low-Cost Surface Mount PIN Diode Attenuator: Application Note 1048parsa mahvisNo ratings yet
- IGBT Characteristic CurveDocument17 pagesIGBT Characteristic CurveSanaKayaniNo ratings yet
- 130nm CMOS Technology Design of Passive UHF RFID Tag inDocument4 pages130nm CMOS Technology Design of Passive UHF RFID Tag inDuc DucNo ratings yet
- Extending The SPI Bus For Long Distnce CommDocument7 pagesExtending The SPI Bus For Long Distnce CommFelipe Ademir Aleman Hdez100% (2)
- AN282 Systemizing RF Power Amplifier DesignDocument6 pagesAN282 Systemizing RF Power Amplifier DesignfahkingmoronNo ratings yet
- Gate Driver For N-Channel Mosfet: Experiment 6Document34 pagesGate Driver For N-Channel Mosfet: Experiment 6Noona MigleiNo ratings yet
- Isolated Gate Driver For SiC MOSFETs With Constant Negative Off VoltageDocument4 pagesIsolated Gate Driver For SiC MOSFETs With Constant Negative Off VoltageHainan DingNo ratings yet
- Lesson 8 Hard and Soft Switching of Power SemiconductorsDocument12 pagesLesson 8 Hard and Soft Switching of Power SemiconductorsChacko MathewNo ratings yet
- A 0.5-Wireless Applications: M Cmos T/R Switch For 900-MhzDocument7 pagesA 0.5-Wireless Applications: M Cmos T/R Switch For 900-MhzAnonymous jxm0WNS7QaNo ratings yet
- D 119Document35 pagesD 119Mohammad Ayatullah MaktoomNo ratings yet
- SteppersDocument3 pagesSteppersdanyNo ratings yet
- A New Procedure For Electroless Tin Plating of Copper: June 2005Document7 pagesA New Procedure For Electroless Tin Plating of Copper: June 2005danyNo ratings yet
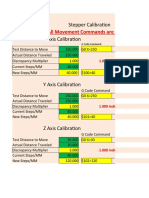
- Insure That All Movement Commands Are Sent in Millimeters: Stepper Calibration X Axis CalibrationDocument3 pagesInsure That All Movement Commands Are Sent in Millimeters: Stepper Calibration X Axis CalibrationdanyNo ratings yet
- Certain Investigations On The Characteristics of Pulse Plating Using Silver On Printed Circuit BoardDocument151 pagesCertain Investigations On The Characteristics of Pulse Plating Using Silver On Printed Circuit BoarddanyNo ratings yet
- Pulse Plating of Sacrificial MN Cu Alloy PDFDocument7 pagesPulse Plating of Sacrificial MN Cu Alloy PDFdanyNo ratings yet
- Transparent 21Document2 pagesTransparent 21danyNo ratings yet
- KL 4030 PDFDocument1 pageKL 4030 PDFdanyNo ratings yet
- United States Patent Office: Patented Mar. 21, 1972Document4 pagesUnited States Patent Office: Patented Mar. 21, 1972danyNo ratings yet
- Pulse and Pulse-Reverse ElectroplatingDocument6 pagesPulse and Pulse-Reverse ElectroplatingdanyNo ratings yet
- United States Patent Office: Ch-Ch-OhDocument4 pagesUnited States Patent Office: Ch-Ch-OhdanyNo ratings yet
- United States Patent Office: Benzylideneacetone-CH-CH CH-CO-CH3Document4 pagesUnited States Patent Office: Benzylideneacetone-CH-CH CH-CO-CH3danyNo ratings yet
- This Should Be A 100mm X 100mm Square. If Not, Adjust Your Horizontal and / or Vertical Resolution Setting(s), and Make Another Test Print To ConfirmDocument1 pageThis Should Be A 100mm X 100mm Square. If Not, Adjust Your Horizontal and / or Vertical Resolution Setting(s), and Make Another Test Print To ConfirmdanyNo ratings yet
- PCB PCB Manufacturing Manufacturing 2 2: Me Me + e + e Me MeDocument25 pagesPCB PCB Manufacturing Manufacturing 2 2: Me Me + e + e Me MedanyNo ratings yet
- 1600060Document4 pages1600060danyNo ratings yet
- Grit Comparison Chart PDFDocument3 pagesGrit Comparison Chart PDFdanyNo ratings yet
- Circuit Boards With Orcad LayoutDocument27 pagesCircuit Boards With Orcad LayoutdanyNo ratings yet
- Cadence Spec C Tra Auto RouterDocument47 pagesCadence Spec C Tra Auto RouterdanyNo ratings yet
- Orcad Tutorial ItalianDocument28 pagesOrcad Tutorial ItaliandanyNo ratings yet
- How To Create Footprints in OrCAD Layout HOA2003Document4 pagesHow To Create Footprints in OrCAD Layout HOA2003danyNo ratings yet
- Hci 634 GDocument263 pagesHci 634 GdanyNo ratings yet
- TL 060Document17 pagesTL 060danyNo ratings yet
- LGB Burner Controls N7435enDocument28 pagesLGB Burner Controls N7435endanyNo ratings yet
- Tin Plated Solutions enDocument1 pageTin Plated Solutions endanyNo ratings yet
- HCI634G1 Installation+Service+Maintenance ManualDocument8 pagesHCI634G1 Installation+Service+Maintenance ManualdanyNo ratings yet
- HCI634G1 Installation+Service+Maintenance ManualDocument8 pagesHCI634G1 Installation+Service+Maintenance ManualdanyNo ratings yet
- Electric Machine - I SyllabiDocument1 pageElectric Machine - I SyllabiRohan SharmaNo ratings yet
- MCQ of DC Machines Madhuri NewDocument31 pagesMCQ of DC Machines Madhuri NewAnkit KumarNo ratings yet
- 2AB.0 Electricity, Worksheet, IGCSEDocument5 pages2AB.0 Electricity, Worksheet, IGCSEjasimNo ratings yet
- User'S Manual: GMBH, GermanyDocument167 pagesUser'S Manual: GMBH, GermanyAndres Felipe CaceresNo ratings yet
- Combined Resin Silicon Bushings Comem CRS Leaflet EN-2019 12 09Document2 pagesCombined Resin Silicon Bushings Comem CRS Leaflet EN-2019 12 09semih1443No ratings yet
- Installation Guide: Roadrelay™ 4Document54 pagesInstallation Guide: Roadrelay™ 4ugruposandres100% (3)
- Assignment 1 Magnetic CircuitDocument4 pagesAssignment 1 Magnetic CircuitMozammeer DeenmahomedNo ratings yet
- HVAC Humidity / Temperature Transmitter For Indoor ApplicationsDocument2 pagesHVAC Humidity / Temperature Transmitter For Indoor ApplicationsАлекс ОколотенкоNo ratings yet
- Iec 60364-7-701Document18 pagesIec 60364-7-701murat tombayoglu100% (2)
- Power N Pack Price List. 01.08.2020Document10 pagesPower N Pack Price List. 01.08.2020DJadee Anuppur AmlaiNo ratings yet
- Electrical Machines II Lab ManualDocument28 pagesElectrical Machines II Lab ManualAnith Krishnan83% (6)
- Circuito Integrado MAP3204Document11 pagesCircuito Integrado MAP3204Lindomar ChavesNo ratings yet
- BBT - Technical Write - UpDocument2 pagesBBT - Technical Write - Upmanoj vermaNo ratings yet
- Measuring Synchronous Generator Model ParametersDocument21 pagesMeasuring Synchronous Generator Model Parametersmuhammadarsalank01No ratings yet
- Voltage RegulatorDocument23 pagesVoltage RegulatorJulio Gabriel AseronNo ratings yet
- SSVR Three Phase enDocument4 pagesSSVR Three Phase enMallikarjunNo ratings yet
- Peak 3A, Low Dropout Regulator With Enable: Features General DescriptionDocument1 pagePeak 3A, Low Dropout Regulator With Enable: Features General Descriptionluis alberto perez monteroNo ratings yet
- Chapter 5 Machine 1Document44 pagesChapter 5 Machine 1martazemeduNo ratings yet
- ERF and ELRDocument21 pagesERF and ELRChhinPiden100% (1)
- MC34063AB, MC34063AC, MC34063EB, MC34063EC: DC-DC Converter Control CircuitsDocument23 pagesMC34063AB, MC34063AC, MC34063EB, MC34063EC: DC-DC Converter Control CircuitsEduardo Brayan Melchor BricenoNo ratings yet
- Smart Power High-Side-Switch: Features Product SummaryDocument16 pagesSmart Power High-Side-Switch: Features Product SummaryMarquinho SilvaNo ratings yet
- Foot Switch Selection GuideDocument4 pagesFoot Switch Selection GuideAshraidah DMNo ratings yet
- 30A Solar Charge ControllerDocument3 pages30A Solar Charge ControllerBasim AlshehriNo ratings yet
- ResolverDocument2 pagesResolverVladimirAgeevNo ratings yet
- Boq ElectricalDocument22 pagesBoq Electricaleng_hosNo ratings yet
- STP For Inverter WiringDocument5 pagesSTP For Inverter WiringVignesh U PNo ratings yet
- O&M Guidelines NPDocument6 pagesO&M Guidelines NPPaldexNo ratings yet
- Power Electronics SCRDocument9 pagesPower Electronics SCREden HazardNo ratings yet
- Automatic Voltage RegulatorDocument3 pagesAutomatic Voltage RegulatorsamkousNo ratings yet
- Ard System - 20000RsDocument3 pagesArd System - 20000RsAbhishek RaiNo ratings yet