You might also like
- 2marks and 3 Marks Questions From Unit-2Document5 pages2marks and 3 Marks Questions From Unit-2soumya vollalaNo ratings yet
- Chapter 3 MSDocument42 pagesChapter 3 MSRounak ChoudhuryNo ratings yet
- Ideal Transformer:: S P S PDocument9 pagesIdeal Transformer:: S P S Ptitubd0% (1)
- Transformer Interview QuestionsDocument11 pagesTransformer Interview QuestionsAnonymous sAmJfcV33% (3)
- TransformersDocument12 pagesTransformersberatgunes543No ratings yet
- Transformers FAQDocument5 pagesTransformers FAQnmvikramNo ratings yet
- Electrical Power Transformer. Theory, ProtectionDocument109 pagesElectrical Power Transformer. Theory, ProtectionAdeel ZafarNo ratings yet
- Unit IIIDocument11 pagesUnit IIIAshok BNo ratings yet
- Autotransformer Connection ExplaineDocument6 pagesAutotransformer Connection ExplaineNepoliyanNo ratings yet
- Complete Basics and Theory of Electrical TransformerDocument6 pagesComplete Basics and Theory of Electrical Transformergokul srinivasanNo ratings yet
- Auto Transformer: Auto Transformer Is Kind of Electrical Transformer Where Primary and Secondary Shares SameDocument8 pagesAuto Transformer: Auto Transformer Is Kind of Electrical Transformer Where Primary and Secondary Shares SameAbhishek PareekNo ratings yet
- Transformers Short Interview QuestionsDocument3 pagesTransformers Short Interview QuestionsIkramul HaqueNo ratings yet
- Auto Transformer ConnectionDocument3 pagesAuto Transformer Connectionamirubote4No ratings yet
- Transformer: Transformer or Transformers or Transformer Is A Component of AnDocument6 pagesTransformer: Transformer or Transformers or Transformer Is A Component of AneoussambaszieyNo ratings yet
- Transformers: What Is An Electric Transformer?Document14 pagesTransformers: What Is An Electric Transformer?Mohamed IbrahemNo ratings yet
- Transformers: What Is An Electric Transformer?Document14 pagesTransformers: What Is An Electric Transformer?Mohamed IbrahemNo ratings yet
- Electrical TransformerDocument19 pagesElectrical Transformer164ec1f5100% (1)
- Basic Construction of TransformerDocument17 pagesBasic Construction of TransformerRudra DeviNo ratings yet
- Transformer 2Document3 pagesTransformer 2mohammadham242No ratings yet
- Transformer - Electrical ExamsDocument123 pagesTransformer - Electrical ExamsFarhan SafdarNo ratings yet
- Auto TransformerDocument4 pagesAuto TransformerMajid GhaffarNo ratings yet
- An Ordinary TransformerDocument4 pagesAn Ordinary Transformersopan saNo ratings yet
- Chapter 3: Transformer: Electrical MachineDocument39 pagesChapter 3: Transformer: Electrical MachineThe zeroNo ratings yet
- Pel Internship ReportDocument44 pagesPel Internship ReportMuhammad FaisalNo ratings yet
- Transformer QuestionsDocument48 pagesTransformer QuestionsPraveen ChandranNo ratings yet
- Physics Porject Report Class 12th MathsDocument22 pagesPhysics Porject Report Class 12th MathsAaditya TomarNo ratings yet
- Transformers: What Is An Electric Transformer?Document8 pagesTransformers: What Is An Electric Transformer?Mohamed IbrahemNo ratings yet
- Electrical Machines 2 MARKSDocument9 pagesElectrical Machines 2 MARKSdtselvanNo ratings yet
- Construction & WorkingDocument22 pagesConstruction & WorkingShah Aizat Razali100% (1)
- TransformerDocument11 pagesTransformerahmed saidNo ratings yet
- Electrical Power Transformer - Definition and Types of TransformerDocument6 pagesElectrical Power Transformer - Definition and Types of Transformersampath kumarNo ratings yet
- HHHHHHHHHDocument21 pagesHHHHHHHHHjameswovelee7No ratings yet
- Electrical Machines Two Marks Noorul Islam Colleege of Engineering KumaracoilDocument6 pagesElectrical Machines Two Marks Noorul Islam Colleege of Engineering KumaracoilSuresh DulamNo ratings yet
- Physics Transformer Project Calss XLLDocument14 pagesPhysics Transformer Project Calss XLLPraveena S BNo ratings yet
- Transformer QuestionsDocument21 pagesTransformer QuestionsKhawaja Adil NajeebNo ratings yet
- Cars SurveyDocument15 pagesCars SurveyabcdefgNo ratings yet
- Introduction of Transformers: Instructor: Mrs. Gopika Agarwal Done By: Jivitesh Varshney (B.Tech-3rd Year) Branch-ENDocument26 pagesIntroduction of Transformers: Instructor: Mrs. Gopika Agarwal Done By: Jivitesh Varshney (B.Tech-3rd Year) Branch-ENNishika SharmaNo ratings yet
- ReportDocument21 pagesReporthrishikesh anvekarNo ratings yet
- Capacitance:: Armature Windings Lap and Wave Windings (Year - 2) - YoutubeDocument6 pagesCapacitance:: Armature Windings Lap and Wave Windings (Year - 2) - YoutubeMukeshKumarMahtoNo ratings yet
- UNIT 3 Transformer BEEDocument18 pagesUNIT 3 Transformer BEElakshya purbiaNo ratings yet
- Bee Voltage Regulation EfficiencyDocument8 pagesBee Voltage Regulation EfficiencyrasoolNo ratings yet
- Answer:: What Is "Pu" in Electrical Engineering?Document4 pagesAnswer:: What Is "Pu" in Electrical Engineering?SAjjad aliNo ratings yet
- Transformer: Presented byDocument23 pagesTransformer: Presented byPrashant PuriNo ratings yet
- Unit IV TransformerDocument31 pagesUnit IV TransformerParikshit SinghNo ratings yet
- TransformerDocument17 pagesTransformerKULDEEP SOLANKINo ratings yet
- Transformer PresentationDocument29 pagesTransformer PresentationHannan AhmedNo ratings yet
- Ee208 Chapter 2 TransformersDocument15 pagesEe208 Chapter 2 TransformersTinozivasheNo ratings yet
- Transformer DetailsDocument26 pagesTransformer DetailsMadhu Mathi ErNo ratings yet
- II yr/III Sem/Mech/EEE 2 Marks With Answers Unit-IDocument6 pagesII yr/III Sem/Mech/EEE 2 Marks With Answers Unit-IanunilaNo ratings yet
- Instrument Transformers 1Document11 pagesInstrument Transformers 1Elisha NissiNo ratings yet
- EMS Assign1Document5 pagesEMS Assign1Shahbaz ZafarNo ratings yet
- PHYSICS TransformerDocument19 pagesPHYSICS TransformerSHIVAM GUPTANo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Power Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesFrom EverandPower Electronics Applied to Industrial Systems and Transports, Volume 3: Switching Power SuppliesNo ratings yet
- Auto-Transformer Design - A Practical Handbook for Manufacturers, Contractors and WiremenFrom EverandAuto-Transformer Design - A Practical Handbook for Manufacturers, Contractors and WiremenRating: 4 out of 5 stars4/5 (2)
- STEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10From EverandSTEM: Science, Technology, Engineering and Maths Principles Teachers Pack V10No ratings yet
- Practical Transformer Handbook: for Electronics, Radio and Communications EngineersFrom EverandPractical Transformer Handbook: for Electronics, Radio and Communications EngineersRating: 4 out of 5 stars4/5 (16)
- Transformers: Sector Energy Dseptinc Steffen SchmidtDocument34 pagesTransformers: Sector Energy Dseptinc Steffen SchmidtJitamitra BehuraNo ratings yet
- Clearances and CreepageDocument4 pagesClearances and CreepageAjit KalelNo ratings yet
- Ca Unimix (En) G 1VCP000008-0909 PDFDocument32 pagesCa Unimix (En) G 1VCP000008-0909 PDFMarco CornelioNo ratings yet
- GTP 33 KV CTCTS, PTs Upto 33KV, SMC Boxes, Deep Drawn Boxes, AB Switch, DO Fuse Set, Isolators, Hardware Fittings, Chemical Earthing, C&R Panels Upto 33KVDocument4 pagesGTP 33 KV CTCTS, PTs Upto 33KV, SMC Boxes, Deep Drawn Boxes, AB Switch, DO Fuse Set, Isolators, Hardware Fittings, Chemical Earthing, C&R Panels Upto 33KVSharafatNo ratings yet
- Select A Transformer Sizing or Rating For Commercial and IndustrialDocument5 pagesSelect A Transformer Sizing or Rating For Commercial and Industrial10rodriguezNo ratings yet
- Presentation PPT On Wireless Energy TransferDocument31 pagesPresentation PPT On Wireless Energy TransferSumit Varshney60% (5)
- Types of Overcurrents & Calculations - NECDocument29 pagesTypes of Overcurrents & Calculations - NECDanielAlejandroRamosQueroNo ratings yet
- MODULE 6 Distribution of Electric PowerDocument54 pagesMODULE 6 Distribution of Electric PowerSharapov Mechanic (Все просто)100% (2)
- Electrical DiagramsDocument45 pagesElectrical Diagramsprasad_rvs100% (2)
- Datacom 507 - Manual PDFDocument29 pagesDatacom 507 - Manual PDFvasilimertzani100% (1)
- Induction MotorDocument27 pagesInduction MotorHermione Calliope ChanNo ratings yet
- Power Quality Improvement Technique Prof. Avik Bhattacharya Department of Electrical Engineering Indian Institute of Technology, Roorkee Lecture - 01Document18 pagesPower Quality Improvement Technique Prof. Avik Bhattacharya Department of Electrical Engineering Indian Institute of Technology, Roorkee Lecture - 01Minali patelNo ratings yet
- 3500 and 3500B Generator With MUI and EUI Engines Electrical SystemDocument4 pages3500 and 3500B Generator With MUI and EUI Engines Electrical Systemkrisari90% (1)
- D-4000-10 Ground MonitorDocument3 pagesD-4000-10 Ground MonitorLuisIgnacioGarciaRivasNo ratings yet
- How To Perform The Load Flow Analysis of IEEE 9 Bus System MATPOWERDocument35 pagesHow To Perform The Load Flow Analysis of IEEE 9 Bus System MATPOWERMuhammet AlkaşNo ratings yet
- Savon I Us Wind Calculator 7Document1 pageSavon I Us Wind Calculator 7Marco NunesNo ratings yet
- Sicop Bimetal OL Relay Type 3UA5-6 3UC5-6Document14 pagesSicop Bimetal OL Relay Type 3UA5-6 3UC5-6erkamlakar2234No ratings yet
- 1-10-020-15 ThyristorDocument9 pages1-10-020-15 ThyristornishantpsbNo ratings yet
- Manual On Protection of GEN and GEN Transformer and 220 KV and 400 KV Network CBIPDocument56 pagesManual On Protection of GEN and GEN Transformer and 220 KV and 400 KV Network CBIPMallikarjun Reddy92% (12)
- 8 - Renewable EnergyDocument128 pages8 - Renewable EnergysaaraanNo ratings yet
- CPT Cirprotec PSC4 12 - 5 400 TT IR 77738406Document8 pagesCPT Cirprotec PSC4 12 - 5 400 TT IR 77738406niltonnas80No ratings yet
- V20 V50 en PDFDocument16 pagesV20 V50 en PDFSubramanian gokulNo ratings yet
- Bta16 600B ArkDocument1 pageBta16 600B ArkBhadreshkumar SharmaNo ratings yet
- Hydrogen-Related R&D - DTU Wind - Nov 2023Document29 pagesHydrogen-Related R&D - DTU Wind - Nov 2023gisele.goesNo ratings yet
- Lehe0886 00Document3 pagesLehe0886 00clavergara100% (1)
- EET432 Sept 2017 - Electricity TariffDocument53 pagesEET432 Sept 2017 - Electricity TariffTie Siang FuiNo ratings yet
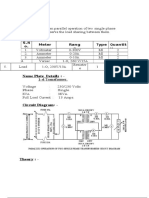
- A I M:-Appar Atus:-: S.N O. Meter Rang e Type Quantit yDocument4 pagesA I M:-Appar Atus:-: S.N O. Meter Rang e Type Quantit yTapobroto ChatterjeeNo ratings yet
- Features and Benefits: Model CB 15-100 HP BoilersDocument5 pagesFeatures and Benefits: Model CB 15-100 HP BoilerssebaversaNo ratings yet
- Engels ASB FDocument3 pagesEngels ASB FharmlesdragonNo ratings yet
- Regulador de TensionDocument8 pagesRegulador de TensionRichard PolNo ratings yet