You might also like
- Power Systems Modelling and Fault Analysis: Theory and PracticeFrom EverandPower Systems Modelling and Fault Analysis: Theory and PracticeRating: 2 out of 5 stars2/5 (1)
- Edibon Reynolds ManualDocument29 pagesEdibon Reynolds ManualArianne Batallones0% (1)
- Astm c110 - CalDocument23 pagesAstm c110 - CalDouglas Ribeiro100% (3)
- (Walter Podolny, JR., John B. Scalzi) Construction PDFDocument354 pages(Walter Podolny, JR., John B. Scalzi) Construction PDFJuan Carlos CastroNo ratings yet
- Design of Tension PilesDocument1 pageDesign of Tension PilesKhaliqe Ahmad0% (1)
- 3 Cylinder Radial Steam EngineDocument3 pages3 Cylinder Radial Steam Engineidriss0% (1)
- Multiphase Electric Machines For Variable-Speed ApplicationsDocument17 pagesMultiphase Electric Machines For Variable-Speed ApplicationsSHUBHAM DABRALNo ratings yet
- A Simple Indirect Field-Oriented Control Scheme For Multiphase Induction Machine, 2005.Document8 pagesA Simple Indirect Field-Oriented Control Scheme For Multiphase Induction Machine, 2005.Ali H. NumanNo ratings yet
- Multiphase Electric Machines For Variable Speed Appl PDFDocument17 pagesMultiphase Electric Machines For Variable Speed Appl PDFDrYs Kishore Babu0% (1)
- Online Cage Rotor Fault DetectionDocument6 pagesOnline Cage Rotor Fault DetectionPedro OdorizziNo ratings yet
- Zarri. OpfDocument13 pagesZarri. OpfAnonymous 1D3dCWNcNo ratings yet
- Experimental Fault-Tolerant Control of A PMSM DriveDocument8 pagesExperimental Fault-Tolerant Control of A PMSM DriveahmedNo ratings yet
- A Review of Induction Motors Signature Analysis As A Medium For Faults DetectionDocument10 pagesA Review of Induction Motors Signature Analysis As A Medium For Faults DetectionIsrael ZamudioNo ratings yet
- 98 e Elm 440Document7 pages98 e Elm 440Mohamad AlimadadiNo ratings yet
- Standard Three-Phase Stator Frames For Multiphase Machines of Prime-Phase Order: Optimal Selection of Slot/Pole CombinationDocument22 pagesStandard Three-Phase Stator Frames For Multiphase Machines of Prime-Phase Order: Optimal Selection of Slot/Pole CombinationHuNo ratings yet
- Thermal Analysis of Induction and Synchronous Reluctance MotorsDocument6 pagesThermal Analysis of Induction and Synchronous Reluctance MotorsShraddha kaleNo ratings yet
- A Generalized Dynamic Model For Brushless Doubly-Fed Induction MachinesDocument11 pagesA Generalized Dynamic Model For Brushless Doubly-Fed Induction MachinesTarak BenslimaneNo ratings yet
- Performance Characteristics Brushless DC Drives: Abstruct-A Simulation Model For The Performance Prediction ofDocument6 pagesPerformance Characteristics Brushless DC Drives: Abstruct-A Simulation Model For The Performance Prediction ofhanxinNo ratings yet
- Work RDDS IEL 11923455 622b3fbedc0c6Document6 pagesWork RDDS IEL 11923455 622b3fbedc0c6LIU LINo ratings yet
- A Review of Drive Techniques For Multiphase MachinesDocument9 pagesA Review of Drive Techniques For Multiphase MachinesMURALI RAJUNo ratings yet
- Evaluation of Stator Winding Faults Severity in Inverter-Fed InductionmotorsDocument12 pagesEvaluation of Stator Winding Faults Severity in Inverter-Fed Inductionmotorsgoncalves.wellington.renanNo ratings yet
- VFDMachinery Vibration Fatigue Lifeand Multilevel Inverter EffectDocument16 pagesVFDMachinery Vibration Fatigue Lifeand Multilevel Inverter EffectGiovanni EsguerraNo ratings yet
- Transient Finite-Element Analysis and Testing of A Salient-Pole Synchronous Generator With Different Damper Winding Design SolutionsDocument7 pagesTransient Finite-Element Analysis and Testing of A Salient-Pole Synchronous Generator With Different Damper Winding Design Solutionsafru2000No ratings yet
- 9470 English TarjomeFaDocument10 pages9470 English TarjomeFatusarNo ratings yet
- A Novel Approach To Detection of Some Parameters For IMDocument6 pagesA Novel Approach To Detection of Some Parameters For IMsajs201No ratings yet
- Terminal Voltage Waveform ComponentsDocument6 pagesTerminal Voltage Waveform ComponentshamidrezaNo ratings yet
- Remedial For Faults Synchronous: ControllerDocument1 pageRemedial For Faults Synchronous: ControllerOmar Chayña VelásquezNo ratings yet
- DC Link Measurements Based Sensorless Induction Motor Variable-Speed DriveDocument14 pagesDC Link Measurements Based Sensorless Induction Motor Variable-Speed DriveNationalinstituteDsnrNo ratings yet
- Turboqtneratortbased Overview of Mathematical Generator ModelingDocument1 pageTurboqtneratortbased Overview of Mathematical Generator ModelingGino Román CisnerosNo ratings yet
- Damper Cages in Genset AlternatorsDocument8 pagesDamper Cages in Genset AlternatorsedsoneiccNo ratings yet
- Consideration About Problems and Solutions of Speed Estimation Method and Parameter Tuning For Speed-Sensorless Vector Control of IM DrivesDocument8 pagesConsideration About Problems and Solutions of Speed Estimation Method and Parameter Tuning For Speed-Sensorless Vector Control of IM Drivessajs201No ratings yet
- Motor Open Circuit ControlDocument12 pagesMotor Open Circuit Controlzy lNo ratings yet
- Modeling of Three-Phase Induction Motor With Two Stator Phases Open-CircuitDocument7 pagesModeling of Three-Phase Induction Motor With Two Stator Phases Open-CircuitMohamed Abdel-Aal MohamedNo ratings yet
- Fast Flux Linkage Measurement For Switched Reluctance Motors Excluding Rotor Clamping Devices and Position SensorsDocument7 pagesFast Flux Linkage Measurement For Switched Reluctance Motors Excluding Rotor Clamping Devices and Position SensorsLalbahadur MajhiNo ratings yet
- Automated Current Control Method For Flux-Linkage Measurement of Synchronous Reluctance MachinesDocument11 pagesAutomated Current Control Method For Flux-Linkage Measurement of Synchronous Reluctance MachinesViệt Anh PhạmNo ratings yet
- A Fast Method For Modelling Skew and Its Effects in Salient-Pole Synchronous GeneratorsDocument10 pagesA Fast Method For Modelling Skew and Its Effects in Salient-Pole Synchronous GeneratorsGuru NathanNo ratings yet
- Induction Machine ModelDocument9 pagesInduction Machine ModelHernanda BudizNo ratings yet
- Mitigation of Fatigue Damage and Vibration Severity of Electric Drivetrains by Systematic Selection of Motion ProfilesDocument10 pagesMitigation of Fatigue Damage and Vibration Severity of Electric Drivetrains by Systematic Selection of Motion ProfilesashishNo ratings yet
- Decomposition Wavelet Transform As Identification of Outer Race Bearing Damage Through Stator Flow Analysis in Induction MotorDocument5 pagesDecomposition Wavelet Transform As Identification of Outer Race Bearing Damage Through Stator Flow Analysis in Induction MotorIradiratu DpkNo ratings yet
- An Overview of Various Faults DetectionDocument14 pagesAn Overview of Various Faults DetectionhamidrezaNo ratings yet
- A Frequency Domain Detection of Stator WDocument8 pagesA Frequency Domain Detection of Stator Wfares noureddineNo ratings yet
- Electric Propulsion System Characterization Through ExperimentsDocument9 pagesElectric Propulsion System Characterization Through Experiments呂文祺No ratings yet
- Tall Am 2002Document6 pagesTall Am 2002AndréNo ratings yet
- 2018 ICEM FSCW KPI Draft1 checkOKDocument8 pages2018 ICEM FSCW KPI Draft1 checkOKMaycon MaranNo ratings yet
- ISA Transactions: Research ArticleDocument12 pagesISA Transactions: Research Articlemarut1999No ratings yet
- A Detailed Model For The Statcom Using Atpdraw: April 2008Document6 pagesA Detailed Model For The Statcom Using Atpdraw: April 2008Eduardo KilianNo ratings yet
- BER-56 Case Stories of Induction Motors Fault Diagnosis Based On Current AnalysisDocument9 pagesBER-56 Case Stories of Induction Motors Fault Diagnosis Based On Current AnalysisClaylson Figueiredo JúlioNo ratings yet
- Machines 11 00132Document18 pagesMachines 11 00132Balan SelvanNo ratings yet
- 2015 - Four Quadrant Torque Ripple Minimization of SRM Through Current Profiling With Mitigation of Rotor Eccentricity Problem and Sensor ErrorsDocument8 pages2015 - Four Quadrant Torque Ripple Minimization of SRM Through Current Profiling With Mitigation of Rotor Eccentricity Problem and Sensor ErrorsMarcelo Vinicius de PaulaNo ratings yet
- Evaluation of Progressive Deterioration of A Squirrel-Cage Rotor, With A Condition Monitoring System That Implements The Sideband MethodologyDocument6 pagesEvaluation of Progressive Deterioration of A Squirrel-Cage Rotor, With A Condition Monitoring System That Implements The Sideband MethodologyLeo ArguijoNo ratings yet
- Turbine-Generator Shaft Torques and Fatigue - Part I - Simulation Methods and Fatigue AnalysisDocument9 pagesTurbine-Generator Shaft Torques and Fatigue - Part I - Simulation Methods and Fatigue AnalysisashishNo ratings yet
- 1 PDFDocument7 pages1 PDFaniezahid100% (1)
- Simulation of A Double-Sided Axial Flux Brushless DC Two-Phase Motor DynamicsDocument7 pagesSimulation of A Double-Sided Axial Flux Brushless DC Two-Phase Motor Dynamicsrupalchopade5163No ratings yet
- International Transactions On Electrical Energy Systems - 2018 - Chinmaya - Experimental Analysis of Various Space Vector PDFDocument15 pagesInternational Transactions On Electrical Energy Systems - 2018 - Chinmaya - Experimental Analysis of Various Space Vector PDFPedro Henrique BayerNo ratings yet
- Analysis and Validation of A Real-Time AC Drive Simulator, 2004.Document10 pagesAnalysis and Validation of A Real-Time AC Drive Simulator, 2004.Ali H. NumanNo ratings yet
- Statistic-Based Method To Monitor Belt Transmission Looseness Through Motor Phase CurrentsDocument9 pagesStatistic-Based Method To Monitor Belt Transmission Looseness Through Motor Phase CurrentsJOEL EZEQUIEL PACHECO MENANo ratings yet
- A Review of Condition Monitoring of Induction Motors Based On Stray FluxDocument7 pagesA Review of Condition Monitoring of Induction Motors Based On Stray FluxRenergy NusantaraNo ratings yet
- Torsional Vibration Analysis of Large Rotor System Using Finite-Element and Matlab ProceduresDocument6 pagesTorsional Vibration Analysis of Large Rotor System Using Finite-Element and Matlab ProceduresDynamix SolverNo ratings yet
- Computation of Additional Losses Due To Rotoreccentricity in Electrical MachinesDocument8 pagesComputation of Additional Losses Due To Rotoreccentricity in Electrical Machinesafru2000No ratings yet
- Analytical and Experimental Evaluation of A WECS Based On A Cage Induction Generator Fed by A Matrix ConverterDocument12 pagesAnalytical and Experimental Evaluation of A WECS Based On A Cage Induction Generator Fed by A Matrix ConverterVipul PanchalNo ratings yet
- A Comparative Study Between Direct Torque ControlDocument9 pagesA Comparative Study Between Direct Torque Control1032212420No ratings yet
- Simulation of Static Frequency Converter For Synchronous Machine Operation and Investigation of Shaft VoltageDocument6 pagesSimulation of Static Frequency Converter For Synchronous Machine Operation and Investigation of Shaft VoltageraghavremNo ratings yet
- Nakayama 2019Document11 pagesNakayama 2019Harsh PatilNo ratings yet
- Packing: Flexible, Resilient, Proven ReliabilityDocument12 pagesPacking: Flexible, Resilient, Proven Reliabilitykeo85No ratings yet
- Route InformationDocument12 pagesRoute InformationSas Marian SasNo ratings yet
- Fire Alarm ProjectDocument12 pagesFire Alarm ProjectX14SlayerNo ratings yet
- Pp10 CCGT Power Station: Sootblower Operation and Maintenance ManualDocument78 pagesPp10 CCGT Power Station: Sootblower Operation and Maintenance Manualanbesivam87_49857255No ratings yet
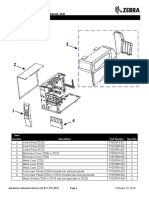
- Zt200 Series Parts Catalog en UsDocument10 pagesZt200 Series Parts Catalog en UsJonel BuenaventuraNo ratings yet
- Elemen 3.3 PELATIHAN K3LL UMUM KEPADA SELURUH PEKERJA - Compressed - Compressed (1) - Compressed - Opt PDFDocument321 pagesElemen 3.3 PELATIHAN K3LL UMUM KEPADA SELURUH PEKERJA - Compressed - Compressed (1) - Compressed - Opt PDFLubrisindo Jaya GemilangNo ratings yet
- LA Maint Inst CR193 Vac GEH5306CDocument16 pagesLA Maint Inst CR193 Vac GEH5306CMike RobertsonNo ratings yet
- Sulfonated Asphalt CCCDocument7 pagesSulfonated Asphalt CCCwynneralphNo ratings yet
- Drawings Chapter 4: Computer: Introduction To CadDocument2 pagesDrawings Chapter 4: Computer: Introduction To CadLakshmi ChaitanyaNo ratings yet
- Civil and Structural Standards For Intelligent Transportation System (ITS) - V2.1 QCS 2014 - Release NoteDocument6 pagesCivil and Structural Standards For Intelligent Transportation System (ITS) - V2.1 QCS 2014 - Release NotePrasanth KBNo ratings yet
- ManualDraftStab PDFDocument51 pagesManualDraftStab PDFДмитрий ЯрычNo ratings yet
- AN PRC 104A - Serv - User - TM11 5820 919 12 - 1986Document106 pagesAN PRC 104A - Serv - User - TM11 5820 919 12 - 1986changiz2220No ratings yet
- Helicopter 1Document28 pagesHelicopter 1chelsyNo ratings yet
- Technical Specification Sandvik LH514-5Document3 pagesTechnical Specification Sandvik LH514-5Franklin Labbe100% (1)
- Welding Safety QuestionnaireDocument4 pagesWelding Safety QuestionnaireNicolae MarinNo ratings yet
- 2007 Hoyt Compound ManualDocument16 pages2007 Hoyt Compound ManualMatthew WaldronNo ratings yet
- Gpu Cuda 2Document72 pagesGpu Cuda 2Joaquin FuentesNo ratings yet
- Asme Standards Committee Gas Technology InstituteDocument30 pagesAsme Standards Committee Gas Technology InstituteWalid MohammedNo ratings yet
- Tool Function Q+A: # Answer 1Document2 pagesTool Function Q+A: # Answer 1David BumbaloughNo ratings yet
- Modified Lo-Chau QKD ProtocolDocument5 pagesModified Lo-Chau QKD ProtocolMLhkuNo ratings yet
- Topologyies by SyedDocument19 pagesTopologyies by SyedSyed hasan haiderNo ratings yet
- Hazard Communication ProgramDocument9 pagesHazard Communication Programelvis1979No ratings yet
- WEG UBW Molded Case Circuit Breaker enDocument36 pagesWEG UBW Molded Case Circuit Breaker enHélio SousaNo ratings yet
- Silicones PhophazenesDocument35 pagesSilicones PhophazenesGaurav 016No ratings yet
- Bolt CapacityDocument9 pagesBolt CapacityElias PantaleoNo ratings yet