You might also like
- Real Time Feature Extraction of ECG Signal On Android PlatformDocument6 pagesReal Time Feature Extraction of ECG Signal On Android PlatformphatvhupNo ratings yet
- An Area Efficient Low Power FIR Filter For ECG Noise Removal ApplicationDocument10 pagesAn Area Efficient Low Power FIR Filter For ECG Noise Removal ApplicationKRISHNARAJ RNo ratings yet
- Using of Fir and IIR Filters For Noise Removal From ECG SignalDocument9 pagesUsing of Fir and IIR Filters For Noise Removal From ECG SignalViprilia RakhmahNo ratings yet
- Design and Implementation of Bioamplifier For Portable ECG DeviceDocument19 pagesDesign and Implementation of Bioamplifier For Portable ECG Devicej4everNo ratings yet
- A Novel Method of QRS Detection Using Adaptive Multilevel Thresholding With Statistical False Peak EliminationDocument10 pagesA Novel Method of QRS Detection Using Adaptive Multilevel Thresholding With Statistical False Peak EliminationIJRASETPublicationsNo ratings yet
- JTECPaper ECG 2017Document11 pagesJTECPaper ECG 2017Felipe Cavalcante da SilvaNo ratings yet
- Venkat Es An 2018Document8 pagesVenkat Es An 2018muraliNo ratings yet
- Kahankova MartinekDocument15 pagesKahankova MartinekRIDAKORDOR KAMAR,BIOMEDICAL(19-23) Vel Tech, ChennaiNo ratings yet
- 201 1496639237 - 05-06-2017 PDFDocument4 pages201 1496639237 - 05-06-2017 PDFEditor IJRITCCNo ratings yet
- FPGA Based High Speed ECG Signal Diagnosis For ArtifactsDocument4 pagesFPGA Based High Speed ECG Signal Diagnosis For ArtifactsEditor IJRITCCNo ratings yet
- On-Line Monitoring and AnyalisisDocument7 pagesOn-Line Monitoring and AnyalisisOmar Dario Urrego CardenasNo ratings yet
- Design of A Real-Time ECG Filter For Portable Mobile Medical SystemsDocument9 pagesDesign of A Real-Time ECG Filter For Portable Mobile Medical SystemsIsma IbaNo ratings yet
- Verilog AATDocument11 pagesVerilog AATChinmaya BhatNo ratings yet
- ECG Noise Cancellation Using Digital Filters: March 1998Document3 pagesECG Noise Cancellation Using Digital Filters: March 1998Hala MostafaNo ratings yet
- Evaluating ECG Capturing Using Sound-Card of PCLapDocument23 pagesEvaluating ECG Capturing Using Sound-Card of PCLapMarcus WagnerNo ratings yet
- Ijreas Volume 2, Issue 2 (February 2012) ISSN: 2249-3905 Filtering Techniques For Ecg Signal ProcessingDocument9 pagesIjreas Volume 2, Issue 2 (February 2012) ISSN: 2249-3905 Filtering Techniques For Ecg Signal ProcessingHarshit JainNo ratings yet
- Reviewpaperon Feature Extraction Methodsfor EEGSignal AnalysisDocument9 pagesReviewpaperon Feature Extraction Methodsfor EEGSignal AnalysisAstha NayakNo ratings yet
- Ecg AnalysisDocument20 pagesEcg AnalysisDeepesh RajpootNo ratings yet
- Fariha 2020 J. Phys. Conf. Ser. 1532 012022Document12 pagesFariha 2020 J. Phys. Conf. Ser. 1532 012022Anagha PradeepNo ratings yet
- Computers in Biology and MedicineDocument10 pagesComputers in Biology and Medicineisaí lozanoNo ratings yet
- Electrical Impedance Tomography Spectroscopy (EITS) For Human Head ImagingDocument14 pagesElectrical Impedance Tomography Spectroscopy (EITS) For Human Head ImagingVladimir TrujilloNo ratings yet
- Resource Efficient LDPC Decoders: From Algorithms to Hardware ArchitecturesFrom EverandResource Efficient LDPC Decoders: From Algorithms to Hardware ArchitecturesNo ratings yet
- Project BookDocument9 pagesProject BookArunim SharmaNo ratings yet
- Base Line Wander, Power Line Interference Noise Suppression and QRS Detection in ECG Signal Using SCILABDocument7 pagesBase Line Wander, Power Line Interference Noise Suppression and QRS Detection in ECG Signal Using SCILABIJRASETPublicationsNo ratings yet
- Universal Application-Specific Integrated Circuit For Bioelectric Data AcquisitionDocument7 pagesUniversal Application-Specific Integrated Circuit For Bioelectric Data AcquisitionSohei LaNo ratings yet
- Developments and Applications for ECG Signal Processing: Modeling, Segmentation, and Pattern RecognitionFrom EverandDevelopments and Applications for ECG Signal Processing: Modeling, Segmentation, and Pattern RecognitionJoao Paulo do Vale MadeiroNo ratings yet
- Removal of Noise From Electrocardiogram Using Digital FIR and IIR Filters With Various MethodsDocument6 pagesRemoval of Noise From Electrocardiogram Using Digital FIR and IIR Filters With Various MethodsRimsha MaryamNo ratings yet
- 24 79 1 PBDocument4 pages24 79 1 PBLavdrim PanxhaNo ratings yet
- Improved Spectrogram Analysis For ECG Signal in Emergency Medical ApplicationsDocument6 pagesImproved Spectrogram Analysis For ECG Signal in Emergency Medical ApplicationsEditor IJACSANo ratings yet
- Arrhy HD ResearchPaperDocument25 pagesArrhy HD ResearchPaperidesign whatNo ratings yet
- Ramiso Camba Banaay FinalProjectPresentationSlidesDocument44 pagesRamiso Camba Banaay FinalProjectPresentationSlidesJames CambaNo ratings yet
- ECG Signal Processing, Classification and Interpretation: A Comprehensive Framework of Computational IntelligenceFrom EverandECG Signal Processing, Classification and Interpretation: A Comprehensive Framework of Computational IntelligenceNo ratings yet
- Ecg Monitoring SystemDocument7 pagesEcg Monitoring SystemGestión WebNo ratings yet
- VLSI Implementation of QRS Complex Detector Based On Wavelet DecompositionDocument11 pagesVLSI Implementation of QRS Complex Detector Based On Wavelet DecompositionVengababu VeturiNo ratings yet
- A Review of Electrocardiogram Filtering: Shen Luo, PHD, Paul JohnstonDocument11 pagesA Review of Electrocardiogram Filtering: Shen Luo, PHD, Paul Johnstonvenkat301485No ratings yet
- DWT PDFDocument7 pagesDWT PDFsumanth_0678No ratings yet
- Research Proposal - Haseeb - DSPDocument2 pagesResearch Proposal - Haseeb - DSPAhsan Altaf100% (1)
- Ganesan 2018Document5 pagesGanesan 2018Ryan Azmi Zuhdi DamanikNo ratings yet
- ABC Optimized RBF Network Classifies EEG SignalsDocument12 pagesABC Optimized RBF Network Classifies EEG SignalsGAGAN SACHDEVANo ratings yet
- JTECPaper-ECG-2017Document11 pagesJTECPaper-ECG-2017Jaderson RobertoNo ratings yet
- Symmetry 13 01461Document16 pagesSymmetry 13 01461lokesh patilNo ratings yet
- Estimation of ECG Features Using LabVIEW PDFDocument5 pagesEstimation of ECG Features Using LabVIEW PDFAstrid LovaszNo ratings yet
- Time-Frequency Domain for Segmentation and Classification of Non-stationary Signals: The Stockwell Transform Applied on Bio-signals and Electric SignalsFrom EverandTime-Frequency Domain for Segmentation and Classification of Non-stationary Signals: The Stockwell Transform Applied on Bio-signals and Electric SignalsNo ratings yet
- Proof: Engineering Science and Technology, An International JournalDocument8 pagesProof: Engineering Science and Technology, An International JournalAmbica AnnavarapuNo ratings yet
- Partial-Update Adaptive Signal Processing: Design Analysis and ImplementationFrom EverandPartial-Update Adaptive Signal Processing: Design Analysis and ImplementationNo ratings yet
- Estimation of Respiratory Rate Through Breathing AudioDocument12 pagesEstimation of Respiratory Rate Through Breathing AudioIJRASETPublicationsNo ratings yet
- Classification Algorithm For Feature Extraction Using Linear Discriminant Analysis and Cross-Correlation On ECG SignalsDocument14 pagesClassification Algorithm For Feature Extraction Using Linear Discriminant Analysis and Cross-Correlation On ECG SignalsHassan SayedNo ratings yet
- Classification Algorithm For Feature Extraction Using Linear Discriminant Analysis and Cross-Correlation On ECG SignalsDocument14 pagesClassification Algorithm For Feature Extraction Using Linear Discriminant Analysis and Cross-Correlation On ECG SignalsHassan SayedNo ratings yet
- Wireless Monitoring of Physiological Data Using Nexus-10 & BiotraceDocument64 pagesWireless Monitoring of Physiological Data Using Nexus-10 & BiotraceInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- 77 PubDocument6 pages77 PubMojtaba JabbariNo ratings yet
- Automatic fault diagnosis of internal combustion engines using spectrogram analysis and neural networksDocument8 pagesAutomatic fault diagnosis of internal combustion engines using spectrogram analysis and neural networksznadeem2No ratings yet
- Impact_of_filtration_elements_on_bioelectrical_sigDocument6 pagesImpact_of_filtration_elements_on_bioelectrical_sigMuhammad Arifatul TriyonoNo ratings yet
- The Physics and Technology of Diagnostic Ultrasound: Study Guide (Second Edition)From EverandThe Physics and Technology of Diagnostic Ultrasound: Study Guide (Second Edition)No ratings yet
- Simulink Implementation of RLS AlgorithmDocument14 pagesSimulink Implementation of RLS AlgorithmAkilesh MDNo ratings yet
- Haptic Feedback: Rationale and Source of Our Project IdeaDocument25 pagesHaptic Feedback: Rationale and Source of Our Project IdeasrujanNo ratings yet
- A Robust Approach To Wavelet Transform Feature Extraction of ECG Signal-IJAERDV03I1271886Document10 pagesA Robust Approach To Wavelet Transform Feature Extraction of ECG Signal-IJAERDV03I1271886Editor IJAERDNo ratings yet
- Ieee Digital Signal Processing 2015 Matlab Project List Mtech BeDocument3 pagesIeee Digital Signal Processing 2015 Matlab Project List Mtech BeHassan RohailNo ratings yet
- Echo Cancellation ThesisDocument5 pagesEcho Cancellation Thesisafjrqxflw100% (2)
- CA3 Free Paper FiguresDocument3 pagesCA3 Free Paper FiguresLaura CursaruNo ratings yet
- DICOM and Slicer: A TutorialDocument75 pagesDICOM and Slicer: A TutorialLaura CursaruNo ratings yet
- Cryopreservation AdvancesDocument22 pagesCryopreservation AdvancesLaura CursaruNo ratings yet
- Basics of Data Loading and 3D Visualization in 3D Slicer: Sonia Pujol, PH.DDocument52 pagesBasics of Data Loading and 3D Visualization in 3D Slicer: Sonia Pujol, PH.DLaura CursaruNo ratings yet
- 10 0000@www Ncbi NLM Nih gov@PMC2781097Document9 pages10 0000@www Ncbi NLM Nih gov@PMC2781097Laura CursaruNo ratings yet
- Cryopreservation Aims To Engineer Novel Ways To Freeze, Store, and Thaw OrgansDocument3 pagesCryopreservation Aims To Engineer Novel Ways To Freeze, Store, and Thaw OrgansLaura CursaruNo ratings yet
- 4694 FullDocument9 pages4694 FullLaura CursaruNo ratings yet
- Upper-Body Motion Mode Recognition Based On Imus For A Dynamic Spine BraceDocument4 pagesUpper-Body Motion Mode Recognition Based On Imus For A Dynamic Spine BraceLaura CursaruNo ratings yet
- New Approaches To Cryopreservation of Cells, Tissues, and OrgansDocument19 pagesNew Approaches To Cryopreservation of Cells, Tissues, and OrgansLaura CursaruNo ratings yet
- United States Patent (19) : 73) Assignee: Children's Hospital at Stanford, PaloDocument7 pagesUnited States Patent (19) : 73) Assignee: Children's Hospital at Stanford, PaloLaura CursaruNo ratings yet
- Entropy: Wavelet Entropy Automatically Detects Episodes of Atrial Fibrillation From Single-Lead ElectrocardiogramsDocument21 pagesEntropy: Wavelet Entropy Automatically Detects Episodes of Atrial Fibrillation From Single-Lead ElectrocardiogramsLaura CursaruNo ratings yet
- Robotic Nurse Duties in The Urology Operative Room: 11 Years of ExperienceDocument8 pagesRobotic Nurse Duties in The Urology Operative Room: 11 Years of ExperienceLaura CursaruNo ratings yet
- Aplicatii de Baza Rulate in SimulatorDocument12 pagesAplicatii de Baza Rulate in SimulatorAlexandra DumitruNo ratings yet
- Biomedical Signal Processing and Control: Jibin Wang, Ping Wang, Suping WangDocument10 pagesBiomedical Signal Processing and Control: Jibin Wang, Ping Wang, Suping WangLaura CursaruNo ratings yet
- Livrare de Medicamente, Operatii La Scala Nano, Sensibilitate Si DetoxifiereDocument11 pagesLivrare de Medicamente, Operatii La Scala Nano, Sensibilitate Si DetoxifiereLaura CursaruNo ratings yet
- Nanorobots in Healthcare ApplicationsDocument9 pagesNanorobots in Healthcare ApplicationsLaura CursaruNo ratings yet
- Plant Layout and its Types in 40 CharactersDocument15 pagesPlant Layout and its Types in 40 CharactersRocks KiranNo ratings yet
- (1-01) Spesifikasi BTL-6000 High Intensity Laser 12 Watt (HIL 12 Watt)Document2 pages(1-01) Spesifikasi BTL-6000 High Intensity Laser 12 Watt (HIL 12 Watt)Fardiyan SyafriNo ratings yet
- Ac 1Document2 pagesAc 1Alfredo jose Medina revattaNo ratings yet
- 40Gb/s TIA AGCDocument14 pages40Gb/s TIA AGCAsif JahangirNo ratings yet
- Semi-Prefabricated, 27762 FT: 1760 KW, Tier 3, Indirect Air EconomizerDocument7 pagesSemi-Prefabricated, 27762 FT: 1760 KW, Tier 3, Indirect Air EconomizerdexiNo ratings yet
- ARCH684 Velikov Theory Since 1989Document6 pagesARCH684 Velikov Theory Since 1989mlparedes2No ratings yet
- Category and Selection of Roller BitDocument23 pagesCategory and Selection of Roller BitEyanya MtilaNo ratings yet
- IRON TRAINGLE PROJECT MANAGEMENT PRACTICE AND CHALLENGES: IN CASE OF IT PROJECTS IN COMMERCIAL BANK OF ETHIOPIA. Kelemie Tebkew YirdawDocument91 pagesIRON TRAINGLE PROJECT MANAGEMENT PRACTICE AND CHALLENGES: IN CASE OF IT PROJECTS IN COMMERCIAL BANK OF ETHIOPIA. Kelemie Tebkew YirdawAnonymous AtMx4p6dPB100% (1)
- Gpover Ip FormatDocument61 pagesGpover Ip FormatGaurav SethiNo ratings yet
- TOFD - Study Material, Rev.1, 24.05.2019Document125 pagesTOFD - Study Material, Rev.1, 24.05.2019Agung Prastyo Wibowo100% (2)
- Serpentine Pavilion Press PackDocument21 pagesSerpentine Pavilion Press PackAlvaro RosaDayerNo ratings yet
- HP Notebook BIOS Setup GuideDocument8 pagesHP Notebook BIOS Setup GuideBalaRajKumarNo ratings yet
- Roadmap Slides For Powerpoint: This Is A Sample Text. Insert Your Desired Text HereDocument5 pagesRoadmap Slides For Powerpoint: This Is A Sample Text. Insert Your Desired Text HereSai ChaitanyaNo ratings yet
- Report On Breeam 30.08.19Document8 pagesReport On Breeam 30.08.19gayatri parkarNo ratings yet
- Karthikeyan: No:97, Arumugam Street, Vellanaikottai, Sivagiri (TK) Tirunelveli (DT) - 627758Document4 pagesKarthikeyan: No:97, Arumugam Street, Vellanaikottai, Sivagiri (TK) Tirunelveli (DT) - 627758prasannapharaohNo ratings yet
- Governing System of 210mw KwuDocument21 pagesGoverning System of 210mw KwuNitesh Rasekar100% (3)
- PH - Scalance X 300 X 400 - 76Document344 pagesPH - Scalance X 300 X 400 - 76Alejandro BarrazaNo ratings yet
- CC2640CC2650 Bluetooth Low Energy Software Developer's Guide PDFDocument249 pagesCC2640CC2650 Bluetooth Low Energy Software Developer's Guide PDFminhneoNo ratings yet
- Denon PMA-720AE Ver.14 PDFDocument50 pagesDenon PMA-720AE Ver.14 PDFboroda241090% (10)
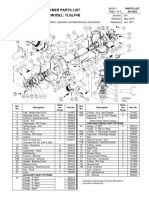
- Blackmer Parts List Pump Model: Tlglf4BDocument2 pagesBlackmer Parts List Pump Model: Tlglf4BRAUL ARMANDO PALOMO CAMPOSNo ratings yet
- TOC - Table of Compliance Arsitek SimDocument40 pagesTOC - Table of Compliance Arsitek SimImran nasution0% (1)
- Intech200906 FocusDocument29 pagesIntech200906 FocusMauro Sánchez100% (1)
- Advanced Product Quality Planning 2 Edition: Changes SummaryDocument18 pagesAdvanced Product Quality Planning 2 Edition: Changes SummaryjerobuNo ratings yet
- Developing Enterprise ArchitectsDocument12 pagesDeveloping Enterprise ArchitectskikinjoNo ratings yet
- L&T QuestionsDocument19 pagesL&T QuestionsVALLI NNo ratings yet
- NAVODILA ZGIB BI4xx GB Ver 1.00Document2 pagesNAVODILA ZGIB BI4xx GB Ver 1.00Catalin NacuNo ratings yet
- Term Paper OF: Online Automation SystemsDocument20 pagesTerm Paper OF: Online Automation SystemsAditya MalhotraNo ratings yet
- SATR-J-6512 - Rev 0 PDFDocument5 pagesSATR-J-6512 - Rev 0 PDFAdel KlkNo ratings yet
- Manuale PlayStation 2Document88 pagesManuale PlayStation 2Davide MaffettoniNo ratings yet
- Risk assessment checklist for bagging, loading and delivery operationsDocument10 pagesRisk assessment checklist for bagging, loading and delivery operationsKamran ZafarNo ratings yet