You might also like
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- Driving Without WheelsDocument14 pagesDriving Without WheelsSen AnushaNo ratings yet
- Small Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsFrom EverandSmall Dynamos and How to Make Them - Practical Instruction on Building a Variety of Machines Including Electric MotorsNo ratings yet
- "Driving Without Wheels, Flying Without Wings": (Magnetic Levitation)Document15 pages"Driving Without Wheels, Flying Without Wings": (Magnetic Levitation)Boreda RahulNo ratings yet
- Maglev Trains: Rajamah EndriDocument9 pagesMaglev Trains: Rajamah EndrikudupudinageshNo ratings yet
- Magnetic LevitationDocument26 pagesMagnetic LevitationSalil Sharma100% (1)
- Magnetic Leviation: MaglevDocument27 pagesMagnetic Leviation: MaglevAjay Kumar DasNo ratings yet
- MAGLEV - Magnetic Levitation TechnologyDocument25 pagesMAGLEV - Magnetic Levitation TechnologyAyanBiswas22No ratings yet
- Maglev Train: Magnetic Levitation and Types of Maglev TrainsDocument7 pagesMaglev Train: Magnetic Levitation and Types of Maglev TrainsGaneshNo ratings yet
- Magnetic LevitationDocument26 pagesMagnetic LevitationABDUL SHAFI M100% (5)
- Magnetic LevitationDocument21 pagesMagnetic LevitationSaurabh AnandNo ratings yet
- Maglev Technology's Future PotentialDocument26 pagesMaglev Technology's Future PotentialSatwik ShridharNo ratings yet
- Magnetic Levitation: An Efficient Transportation System in 40 CharactersDocument12 pagesMagnetic Levitation: An Efficient Transportation System in 40 CharacterstirumalarajNo ratings yet
- Maglev Train Report SummaryDocument15 pagesMaglev Train Report Summarybansilal085No ratings yet
- Everything You Need to Know About Magnetic Levitation TransportationDocument15 pagesEverything You Need to Know About Magnetic Levitation TransportationDev KumarNo ratings yet
- Visvesvaraya Technological University, Belgaum: Maglev TrainsDocument6 pagesVisvesvaraya Technological University, Belgaum: Maglev Trainschethan rNo ratings yet
- Driving Without Wheels, Flying Without WingsDocument18 pagesDriving Without Wheels, Flying Without Wingsaditya_kumar_me100% (1)
- Nalanda: Institute of Technology (Nit)Document23 pagesNalanda: Institute of Technology (Nit)RAGHU RAGHUNo ratings yet
- Paper On Magnetic LevitationDocument13 pagesPaper On Magnetic LevitationAshutosh Agrawal100% (7)
- Seminar ReportDocument35 pagesSeminar Reportamalcyriac2108No ratings yet
- MaglevDocument23 pagesMaglevSneha NagaruruNo ratings yet
- 44driving Without Wheels Flying Without Wings (Magn LevitDocument12 pages44driving Without Wheels Flying Without Wings (Magn LevitArimilli SricharanNo ratings yet
- Maglev Paper PresentationDocument12 pagesMaglev Paper Presentationaditya_kumar_me100% (1)
- Presentation1 SeminarDocument18 pagesPresentation1 SeminarSatyabrataPradhanNo ratings yet
- Magnetic Levitation Magnetic LevitationDocument6 pagesMagnetic Levitation Magnetic LevitationAnanth Sai YadavNo ratings yet
- Levitation EMS EDLDocument38 pagesLevitation EMS EDLhemanth sai kumar giduturiNo ratings yet
- Maglev Train Propulsion and Levitation SystemsDocument10 pagesMaglev Train Propulsion and Levitation SystemsammuNo ratings yet
- Maglev trains propelled by magnetic fieldsDocument19 pagesMaglev trains propelled by magnetic fieldsThejeswara ReddyNo ratings yet
- Magnetic Levitating TrainsDocument8 pagesMagnetic Levitating TrainsArindomNo ratings yet
- Presentation On Maglev - Magnetic Levitation Trasportation: Submitted byDocument19 pagesPresentation On Maglev - Magnetic Levitation Trasportation: Submitted byAishacumen BhargavaNo ratings yet
- Anilal PRTDocument16 pagesAnilal PRTAmal JithNo ratings yet
- Paper Presented at Youth Conference On Magnetic Levitation TechnologyDocument8 pagesPaper Presented at Youth Conference On Magnetic Levitation TechnologyFaisal EmmanuelNo ratings yet
- Levitation and Maglev Train Work ProcessDocument5 pagesLevitation and Maglev Train Work Processrobinislam2002khanNo ratings yet
- Magnetic LevitationDocument16 pagesMagnetic LevitationPrabhat PatelNo ratings yet
- MagLev Technology for TransportationDocument28 pagesMagLev Technology for TransportationSanjid ElahiNo ratings yet
- Magnetic LevitationDocument4 pagesMagnetic Levitationtowfiqeee0% (1)
- Maglev TrainDocument8 pagesMaglev TrainPrabir Kumar PatiNo ratings yet
- MAGLEV TRAIN TECHDocument17 pagesMAGLEV TRAIN TECHMartin AntoNo ratings yet
- MagLev Train History and TechnologyDocument22 pagesMagLev Train History and TechnologySreedhar SaiNo ratings yet
- Eddy Current BrakesDocument24 pagesEddy Current BrakesMd Jawed AkhtarNo ratings yet
- Maglev Train Design and PLC ControlDocument68 pagesMaglev Train Design and PLC ControlmakrandnkulkarniNo ratings yet
- Review of Maglev Train Technologies-Seminar SubhuDocument13 pagesReview of Maglev Train Technologies-Seminar Subhurich2subhu2009No ratings yet
- Basic Structure of Eddy Current Brakes: Found in Cars As WellDocument7 pagesBasic Structure of Eddy Current Brakes: Found in Cars As Wellpseudo networkNo ratings yet
- Maglev Trains: Magnetic Levitation Technology ExplainedDocument17 pagesMaglev Trains: Magnetic Levitation Technology ExplainedrituNo ratings yet
- Electromagnetic Car Synopsis: An Introduction to Design and ApplicationsDocument3 pagesElectromagnetic Car Synopsis: An Introduction to Design and ApplicationsyrikkiNo ratings yet
- AbstractDocument28 pagesAbstractrnarayanjoshiNo ratings yet
- MAGNETIC LEVITATION TRAINS (SeminarDocument19 pagesMAGNETIC LEVITATION TRAINS (SeminarTejas KadamNo ratings yet
- Magnetic Levitated Wheel Final (Updated)Document10 pagesMagnetic Levitated Wheel Final (Updated)Sumek NayanNo ratings yet
- MaglevDocument22 pagesMaglevSneha JainNo ratings yet
- Magnetic Levitation TransportationDocument17 pagesMagnetic Levitation Transportationmahender_yanala6319No ratings yet
- Eddy Current BrakesDocument30 pagesEddy Current Brakesmd shoaib nadafNo ratings yet
- Seminar ReportDocument28 pagesSeminar ReportMohammed Abdul JabbarNo ratings yet
- ECBDocument22 pagesECBBipin RajendranNo ratings yet
- Magnetic Suspension For Motorcycles: Aniket BharambeDocument6 pagesMagnetic Suspension For Motorcycles: Aniket BharambeabiNo ratings yet
- Self Study Presentation (Autosaved)Document26 pagesSelf Study Presentation (Autosaved)Rishabh GuptaNo ratings yet
- Maglev Train Seminar: Principles, Benefits & ApplicationsDocument19 pagesMaglev Train Seminar: Principles, Benefits & ApplicationsVaibhav KantNo ratings yet
- Project Paper Maglev FinalDocument26 pagesProject Paper Maglev Finaljp2002sonuNo ratings yet
- Department of Mechanical EngineeringDocument18 pagesDepartment of Mechanical EngineeringMuddukrishna C ShettyNo ratings yet
- Principles of Superconducting LevitationDocument7 pagesPrinciples of Superconducting LevitationandiNo ratings yet
- Electromagnetic and Magnetic Suspension: IJEDR1703070 474Document8 pagesElectromagnetic and Magnetic Suspension: IJEDR1703070 474Naani ChowdaryNo ratings yet
- Assessing The Future Trends of Reactive Power Demand of Distribution NetworksDocument11 pagesAssessing The Future Trends of Reactive Power Demand of Distribution NetworksSurya VamshiNo ratings yet
- Career Objective:: Suryavamshi KandagatlaDocument2 pagesCareer Objective:: Suryavamshi KandagatlaSurya VamshiNo ratings yet
- Teegala Krishna Reddy Engineering CollegeDocument11 pagesTeegala Krishna Reddy Engineering CollegeSurya VamshiNo ratings yet
- Driving Without Wheels: An Overview of Magnetic Levitation TechnologyDocument14 pagesDriving Without Wheels: An Overview of Magnetic Levitation TechnologySurya VamshiNo ratings yet
- Teegala Krishna Reddy Engineering CollegeDocument11 pagesTeegala Krishna Reddy Engineering CollegeSurya VamshiNo ratings yet
- Assessing The Future Trends of Reactive Power Demand of Distribution NetworksDocument11 pagesAssessing The Future Trends of Reactive Power Demand of Distribution NetworksSurya VamshiNo ratings yet
- Assessing The Future Trends of Reactive Power Demand of Distribution NetworksDocument11 pagesAssessing The Future Trends of Reactive Power Demand of Distribution NetworksSurya VamshiNo ratings yet
- Driving Without Wheels: An Overview of Magnetic Levitation TechnologyDocument14 pagesDriving Without Wheels: An Overview of Magnetic Levitation TechnologySurya VamshiNo ratings yet
- Analysis Sheet Pile-1Document7 pagesAnalysis Sheet Pile-1Imam MaulanaNo ratings yet
- Part 3 - 5.mooring FacilitiesDocument49 pagesPart 3 - 5.mooring FacilitiesIlham Hussein RasyidNo ratings yet
- Noise From Rail Infrastruct - ProjectsDocument30 pagesNoise From Rail Infrastruct - ProjectsEbru EvranNo ratings yet
- Multimodal TransportDocument10 pagesMultimodal Transportpakawat1100% (1)
- Expressor CompressorDocument81 pagesExpressor Compressormep.No ratings yet
- EDS 06-0017 Customer Installation Earthing DesignDocument48 pagesEDS 06-0017 Customer Installation Earthing DesignelectworldNo ratings yet
- Maintaining rolling gearDocument15 pagesMaintaining rolling gearSATISHNo ratings yet
- 01 Rail BEMO BrochureDocument19 pages01 Rail BEMO Brochurenugra h okiraNo ratings yet
- DTC - Bus Routes DelhiDocument24 pagesDTC - Bus Routes Delhiarvinds40% (2)
- Saudi Projects Update March 2018Document2 pagesSaudi Projects Update March 2018sureshmechanical86No ratings yet
- Acuerdo Europeo Sobre Las Principales Arterias de Tráfico Internacional. Ginebra, 15 de Noviembre de 1975Document55 pagesAcuerdo Europeo Sobre Las Principales Arterias de Tráfico Internacional. Ginebra, 15 de Noviembre de 1975dipublicoNo ratings yet
- Surat Metro Rail Project Feasibility StudyDocument373 pagesSurat Metro Rail Project Feasibility StudyRaj Shah50% (2)
- Exploring Penang on a BudgetDocument8 pagesExploring Penang on a BudgetIza AhmadNo ratings yet
- BRDM-2 Tech Manual enDocument107 pagesBRDM-2 Tech Manual enAndrewStaib86% (7)
- Understanding Sequence of OperationsDocument32 pagesUnderstanding Sequence of OperationsShashi Bhusan SinghNo ratings yet
- Hi SpanDocument54 pagesHi Spangdoyle7282No ratings yet
- Shriram Solitaire BrochureDocument20 pagesShriram Solitaire BrochureProperty SpecialistNo ratings yet
- PD 532 ANTI PIRACY AND HIGHWAY ROBBERYodtDocument2 pagesPD 532 ANTI PIRACY AND HIGHWAY ROBBERYodtDawn JessaNo ratings yet
- North West London Night 071016Document1 pageNorth West London Night 071016Daniel PaiusNo ratings yet
- July 30,2014Document12 pagesJuly 30,2014Maple Lake MessengerNo ratings yet
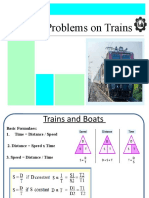
- Trains and Boats FinalDocument52 pagesTrains and Boats FinalSurya AnjuNo ratings yet
- Warren Mi History Part Two Pages 29-51Document23 pagesWarren Mi History Part Two Pages 29-51Wesley E ArnoldNo ratings yet
- CHALLENGES IN IMPLEMENTING A NEW SIGNALLING SYSTEM TO REPLACE AN EXISTING SIGNALLING SYSTEM WHILE MAINTAINING NORMAL TRAIN SERVICE-good ReferenceDocument47 pagesCHALLENGES IN IMPLEMENTING A NEW SIGNALLING SYSTEM TO REPLACE AN EXISTING SIGNALLING SYSTEM WHILE MAINTAINING NORMAL TRAIN SERVICE-good ReferencePulin ChaudhariNo ratings yet
- Change of Concrete Schedule For 902 T BoxDocument2 pagesChange of Concrete Schedule For 902 T BoxkunalkhubaniNo ratings yet
- Ti-Spc-Psi-Protct-6070 (9 08) PDFDocument49 pagesTi-Spc-Psi-Protct-6070 (9 08) PDFsrdeetrdsbc100% (2)
- Science NotesDocument1 pageScience NotesKunal DhimanNo ratings yet
- Unsolicited Proposals - SortedDocument7 pagesUnsolicited Proposals - SortedKim MarquezNo ratings yet
- Is 14665 1 2000Document15 pagesIs 14665 1 2000Kanav SharmaNo ratings yet
- Guidelines For Passenger Services at European AirportsDocument120 pagesGuidelines For Passenger Services at European AirportsJPFJ12100% (2)
- Leap Year PDFDocument123 pagesLeap Year PDFEliane MasonNo ratings yet