You might also like
- Volvo Ingersoll Rand DD14S DD16Document4 pagesVolvo Ingersoll Rand DD14S DD16Jozef50% (2)
- Sick Lector CLV TCP CP v2 1 enDocument25 pagesSick Lector CLV TCP CP v2 1 enRafael GagoNo ratings yet
- Sick Lector CLV TCP CP v2 1 enDocument25 pagesSick Lector CLV TCP CP v2 1 enRafael GagoNo ratings yet
- 6th Central Pay Commission Salary CalculatorDocument15 pages6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- Film Slitting Machine: (System Configuration)Document16 pagesFilm Slitting Machine: (System Configuration)Rafael GagoNo ratings yet
- 07E SpecSheetDocument2 pages07E SpecSheet张连杉No ratings yet
- Pick Up - MurphyDocument2 pagesPick Up - MurphyMauricio Oropeza CabreraNo ratings yet
- Worm Gear Efficiency and Motor Stall Torque Relation CalculationDocument8 pagesWorm Gear Efficiency and Motor Stall Torque Relation CalculationVenkateswaran venkateswaranNo ratings yet
- Maxon GP 81 ADocument1 pageMaxon GP 81 AElectromateNo ratings yet
- Manhole ScheduleDocument7 pagesManhole SchedulejibinNo ratings yet
- Magnetic Pickups Models MP3298, MP7905 and MP7906Document2 pagesMagnetic Pickups Models MP3298, MP7905 and MP7906andreshuertascalderon02No ratings yet
- 850/12-12/53.5° overviewDocument4 pages850/12-12/53.5° overviewbasvkaranNo ratings yet
- 4 Eng PDFDocument31 pages4 Eng PDFZaYnab IbrahimNo ratings yet
- Maxon GP 62 ADocument1 pageMaxon GP 62 AElectromateNo ratings yet
- Caps Submittal - Dampers, Mapfre Miraflores, 080722 - SubmittalDocument43 pagesCaps Submittal - Dampers, Mapfre Miraflores, 080722 - SubmittalJose AlvitrezNo ratings yet
- X-Ray DongmunDocument3 pagesX-Ray DongmunCarlos TorralbaNo ratings yet
- Transilvania University Designs Narrow V-BeltsDocument2 pagesTransilvania University Designs Narrow V-BeltsDiana Maria CozmaNo ratings yet
- Design of Machine Elements Project: Topic: Two-Stage Reduction GearboxDocument9 pagesDesign of Machine Elements Project: Topic: Two-Stage Reduction GearboxRam CharanNo ratings yet
- WINCH DRIVE and MOTOR SELECTION DatasheetDocument1 pageWINCH DRIVE and MOTOR SELECTION DatasheetLy Thanh HaNo ratings yet
- Esls ErieDocument16 pagesEsls ErieHavanhuy HaNo ratings yet
- Power Plant EnginesDocument3 pagesPower Plant EnginesManuel Armando Salazar BravoNo ratings yet
- YASKAWA AC Drive CR700 Supplemental Manual Wire Length Detection & Cargo Swing SuppressionDocument22 pagesYASKAWA AC Drive CR700 Supplemental Manual Wire Length Detection & Cargo Swing SuppressionJefersonStreitNo ratings yet
- M35SP 7TDocument2 pagesM35SP 7TRuka Nunes100% (1)
- 5248 Dieselmax Tier 2 TCA IPUDocument4 pages5248 Dieselmax Tier 2 TCA IPUGuillermo Pablo ColladoNo ratings yet
- Bea XL MB1Document1 pageBea XL MB1CAT CYLINDERNo ratings yet
- 5247 Dieselmax Tier 2 TC IPUDocument4 pages5247 Dieselmax Tier 2 TC IPUGuillermo Pablo ColladoNo ratings yet
- CALCULATION SHEET DESIGNDocument2 pagesCALCULATION SHEET DESIGNrammohanNo ratings yet
- Low Profile Xyθ Stage: Kohzu Precision Co.,LtdDocument2 pagesLow Profile Xyθ Stage: Kohzu Precision Co.,LtdHan JeeNo ratings yet
- 12 32 4寸牵引机报价和技术方案(英文版)02Document13 pages12 32 4寸牵引机报价和技术方案(英文版)02shubham444vyasNo ratings yet
- ASTM Rebars Properties PDFDocument4 pagesASTM Rebars Properties PDFDAN ANDNo ratings yet
- Design of Anchor BoltsDocument1 pageDesign of Anchor BoltsdineshNo ratings yet
- Sew servo motorsDocument4 pagesSew servo motorsScott LawlessNo ratings yet
- UniCrimp 200 DS 2018 10 15 EN A4 V3Document2 pagesUniCrimp 200 DS 2018 10 15 EN A4 V3johnsgdNo ratings yet
- 2/1.5 AH - Horizontal Pump: InstallationDocument2 pages2/1.5 AH - Horizontal Pump: InstallationGuiver Santisteban IbañezNo ratings yet
- 2 - 1.5 BAH DS - Rev - 00 PDFDocument2 pages2 - 1.5 BAH DS - Rev - 00 PDFGuiver Santisteban IbañezNo ratings yet
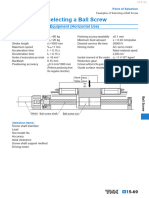
- Examples of Selecting A Ball Screw: High-Speed Transfer Equipment (Horizontal Use)Document26 pagesExamples of Selecting A Ball Screw: High-Speed Transfer Equipment (Horizontal Use)tarunNo ratings yet
- 2 - 6 Cylinder Blocks in Line On HMC S and VMC SDocument22 pages2 - 6 Cylinder Blocks in Line On HMC S and VMC SManjunathNo ratings yet
- Gears Presentation BubuDocument37 pagesGears Presentation BubuAbebaw AyeleNo ratings yet
- Technical Data: 4.1 Machine Model CodeDocument5 pagesTechnical Data: 4.1 Machine Model CodeAhmed AbdelradyNo ratings yet
- Linear Guide SelectionDocument26 pagesLinear Guide Selectionarman.kamrani7No ratings yet
- SM-Series Tachometer & Line Speed Meter FunctionsDocument4 pagesSM-Series Tachometer & Line Speed Meter FunctionsnehalNo ratings yet
- End Main GirderDocument31 pagesEnd Main Girdersakar shresthaNo ratings yet
- 00-02-0181.PDF Magnetic Pick UpDocument2 pages00-02-0181.PDF Magnetic Pick UpOruteNo ratings yet
- Sany 150ton Load ChartDocument21 pagesSany 150ton Load ChartAkhilesh kumar100% (1)
- Barge Ro-Ro RampsDocument5 pagesBarge Ro-Ro RampsBoyNo ratings yet
- Black Max Downhole Motors PDFDocument52 pagesBlack Max Downhole Motors PDFGeorge BoafoNo ratings yet
- Student Manual of Torsional Damped & Un Damped ApparatusDocument3 pagesStudent Manual of Torsional Damped & Un Damped ApparatusaqibNo ratings yet
- Antecedentes HuincheDocument5 pagesAntecedentes HuincheMatias TobarNo ratings yet
- Gears PresentationDocument33 pagesGears PresentationNaveen YadavNo ratings yet
- Technical GearsDocument19 pagesTechnical GearsM.NatarajanNo ratings yet
- Height Depth: The World's Is Determined by Our DrillingDocument2 pagesHeight Depth: The World's Is Determined by Our Drillingrandy yupanquiNo ratings yet
- Square Shaded-Pole Motors: Multi-Function DesignDocument5 pagesSquare Shaded-Pole Motors: Multi-Function DesignJimmy Arias (JimmyStron)No ratings yet
- Lonking CDM856 ZFDocument2 pagesLonking CDM856 ZFBagus RusliNo ratings yet
- Brochure Specification Zoomlion ZCC550H (55 Ton)Document12 pagesBrochure Specification Zoomlion ZCC550H (55 Ton)apray aprayNo ratings yet
- Tyre Development Inputs-CEATDocument1 pageTyre Development Inputs-CEATk.shiva KiranNo ratings yet
- SR14M-2/SR14MP-2: Mechanical Vibratory RollerDocument2 pagesSR14M-2/SR14MP-2: Mechanical Vibratory RollerTaufiq AkbarNo ratings yet
- Cogging Torque Reduction of Interior Permanent-MagnetDocument4 pagesCogging Torque Reduction of Interior Permanent-MagnetrobschaelNo ratings yet
- Cylindrical Compression Helix Springs For Suspension SystemsFrom EverandCylindrical Compression Helix Springs For Suspension SystemsNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Tia PortalDocument46 pagesTia PortalAndré GomesNo ratings yet
- TIAPortalSivarcenUS en-USDocument236 pagesTIAPortalSivarcenUS en-USRafael GagoNo ratings yet
- Training Document For Comprehensive Automation Solutions Totally Integrated Automation (T I A)Document45 pagesTraining Document For Comprehensive Automation Solutions Totally Integrated Automation (T I A)Đạt PhạmNo ratings yet
- Totally Integrated Automation Portal V13 SP1 Upd9Document1 pageTotally Integrated Automation Portal V13 SP1 Upd9Rafael GagoNo ratings yet
- SickDocument16 pagesSickRafael GagoNo ratings yet
- Sick Lector CLV PNDP v2 00 enDocument24 pagesSick Lector CLV PNDP v2 00 enRafael GagoNo ratings yet
- Sick Lector CLV PNDP v2 00 enDocument24 pagesSick Lector CLV PNDP v2 00 enRafael GagoNo ratings yet
- SickDocument16 pagesSickRafael GagoNo ratings yet
- Sick Lector CLV PN CP v2 1 enDocument28 pagesSick Lector CLV PN CP v2 1 enRafael GagoNo ratings yet
- Vertical Packaging Machine: (System Configuration)Document22 pagesVertical Packaging Machine: (System Configuration)Rafael GagoNo ratings yet
- Sick Lector CLV PNDP v2 00 enDocument24 pagesSick Lector CLV PNDP v2 00 enRafael GagoNo ratings yet
- Sick Lector CLV PNDP v2 00 enDocument24 pagesSick Lector CLV PNDP v2 00 enRafael GagoNo ratings yet
- ReaderDocument54 pagesReaderaeromexpower2009No ratings yet
- OpcovwDocument16 pagesOpcovwRafael GagoNo ratings yet
- SickDocument16 pagesSickRafael GagoNo ratings yet
- Opc Docexample EnuDocument16 pagesOpc Docexample EnuRafael GagoNo ratings yet
- Dacust 20Document186 pagesDacust 20Rafael GagoNo ratings yet
- Opcae101 PDFDocument108 pagesOpcae101 PDFRafael GagoNo ratings yet
- Sign LicDocument3 pagesSign LicSumit GoyalNo ratings yet
- S7-1500 SW News KosekDocument36 pagesS7-1500 SW News KosekRafael GagoNo ratings yet
- Data Access Automation Interface Standard February 4, 1999Document100 pagesData Access Automation Interface Standard February 4, 1999Rafael GagoNo ratings yet
- OpccomnDocument33 pagesOpccomnRafael GagoNo ratings yet
- BFP A8618Document323 pagesBFP A8618Rafael GagoNo ratings yet
- Vertical Packaging Machine: (System Configuration)Document22 pagesVertical Packaging Machine: (System Configuration)Rafael GagoNo ratings yet
- GTW3 5Document1 pageGTW3 5Rafael GagoNo ratings yet
- MELSEC-L Digital-Analog Converter Module Sample Ladder Reference ManualDocument33 pagesMELSEC-L Digital-Analog Converter Module Sample Ladder Reference ManualRafael GagoNo ratings yet
- BCN b62005 666 - ADocument18 pagesBCN b62005 666 - ARafael GagoNo ratings yet
- A New Higher Order Shear DeforDocument8 pagesA New Higher Order Shear Deforamira khaldiNo ratings yet
- Performance Study On Multipath Routing Algorithm Using Temporarily Ordered Routing Algorithm (TORA) Using Link '" Reversal in Wireless NetworksDocument4 pagesPerformance Study On Multipath Routing Algorithm Using Temporarily Ordered Routing Algorithm (TORA) Using Link '" Reversal in Wireless NetworksEditor IJTSRDNo ratings yet
- A15 201-NYC Linear AlgebraDocument5 pagesA15 201-NYC Linear AlgebraNicole GuNo ratings yet
- Challenges PDFDocument40 pagesChallenges PDFYahooNo ratings yet
- Composite Optimisation of A Formula One Front WingDocument10 pagesComposite Optimisation of A Formula One Front WingaerostressNo ratings yet
- "Bureaucracy" and "Rationality" in Weber's Organization TheoryDocument6 pages"Bureaucracy" and "Rationality" in Weber's Organization TheoryAnonymous LGZHCYwNo ratings yet
- Te T Nop Sic 56 (1979) Tl7-T26: FieldDocument10 pagesTe T Nop Sic 56 (1979) Tl7-T26: Fieldfrancarlos de la cruz chuquimangoNo ratings yet
- Circular Motion Lab For Physics 2016 SpringDocument1 pageCircular Motion Lab For Physics 2016 SpringIrwansyah Ramadhani100% (1)
- Report ErythromycinDocument26 pagesReport ErythromycinKraken UrNo ratings yet
- SP-Q3 Note#7 Area Under Normal CurveDocument4 pagesSP-Q3 Note#7 Area Under Normal CurvePaulo Amposta CarpioNo ratings yet
- Normal Distribution1Document24 pagesNormal Distribution1Arun RaiNo ratings yet
- Mathematics SSC-I (3rd Set)Document7 pagesMathematics SSC-I (3rd Set)AroobaKanwalNo ratings yet
- 2 - SHELL281 - Creating A Preintegrated General Shell SectionDocument3 pages2 - SHELL281 - Creating A Preintegrated General Shell SectionArtero96No ratings yet
- Multi Component DistillationDocument71 pagesMulti Component DistillationManu Jain83% (6)
- BCA 4th Sem. Asst. 2018-19Document15 pagesBCA 4th Sem. Asst. 2018-19Kumar InfoNo ratings yet
- Class 5 HCF and LCMDocument49 pagesClass 5 HCF and LCMChitra AmruNo ratings yet
- Mechanical Measurements and Control System-1-194 - 1-97 PDFDocument97 pagesMechanical Measurements and Control System-1-194 - 1-97 PDFElangoNo ratings yet
- Kindergarten Lesson Teaches Basic ShapesDocument15 pagesKindergarten Lesson Teaches Basic ShapesMarcel CharaschasNo ratings yet
- 9709 w15 Ms 42Document7 pages9709 w15 Ms 42yuke kristinaNo ratings yet
- FS@Document9 pagesFS@Nidhie ✫ SinghNo ratings yet
- Lecture 14: Principal Component Analysis: Computing The Principal ComponentsDocument6 pagesLecture 14: Principal Component Analysis: Computing The Principal ComponentsShebinNo ratings yet
- Common Technical Definition: QuantificationDocument2 pagesCommon Technical Definition: QuantificationNidaNo ratings yet
- Dac 314 Group 3 (C-V-P Analysis)Document39 pagesDac 314 Group 3 (C-V-P Analysis)Eustus KipkemboiNo ratings yet
- Reflection with MirrorsDocument4 pagesReflection with MirrorsSenenNo ratings yet
- Performance Evaluation of Air Conditioner Using Earth Air Tunnel Heat ExchangerDocument5 pagesPerformance Evaluation of Air Conditioner Using Earth Air Tunnel Heat ExchangerInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Diff Shortening of Tall Steel Building Columns TaranathDocument8 pagesDiff Shortening of Tall Steel Building Columns TaranathgoggingsNo ratings yet
- Deep Learning Linear ModelsDocument49 pagesDeep Learning Linear Modelsthecoolguy96No ratings yet
- Creating Data Tables: Skills IntroductionDocument4 pagesCreating Data Tables: Skills Introductionjane deeNo ratings yet
- Lecture 8.1 Geometric ConstructionDocument26 pagesLecture 8.1 Geometric ConstructionIriama RobertNo ratings yet
- 7-1-The Design of Embankments On Soft Clays, JakobsonDocument11 pages7-1-The Design of Embankments On Soft Clays, Jakobsonد.م. محمد الطاهرNo ratings yet