You might also like
- PHD Course Lectures: OptimizationDocument25 pagesPHD Course Lectures: OptimizationGafeer FableNo ratings yet
- DNSDocument19 pagesDNSMonty0% (1)
- MusicTech Synthesis Master ClassDocument7 pagesMusicTech Synthesis Master Classmorbid mary100% (5)
- More On Functions 2 REDONE 2022Document11 pagesMore On Functions 2 REDONE 2022Lazy BanditNo ratings yet
- Ch8 (3) Numerical IntegrationDocument19 pagesCh8 (3) Numerical Integrationআসিফ রেজাNo ratings yet
- Final Exam-2018Document3 pagesFinal Exam-2018혁준No ratings yet
- Apuntes Calculo 1 Tema 2Document45 pagesApuntes Calculo 1 Tema 2Andres Miguel Cruz CalleNo ratings yet
- Complex Traveling-Wave and Solutions To TheDocument11 pagesComplex Traveling-Wave and Solutions To Thesongs qaumiNo ratings yet
- CH 1 Functions 2Document15 pagesCH 1 Functions 2Mohammed GhallabNo ratings yet
- Final Exam-2020Document3 pagesFinal Exam-2020혁준No ratings yet
- Research Article: Numerical Solution of Two-Point Boundary Value Problems by Interpolating Subdivision SchemesDocument14 pagesResearch Article: Numerical Solution of Two-Point Boundary Value Problems by Interpolating Subdivision SchemesSyeda Tehmina EjazNo ratings yet
- Tutorial 4.: Functions, Their Domains and Ranges, Graphs of FunctionsDocument3 pagesTutorial 4.: Functions, Their Domains and Ranges, Graphs of FunctionsKevon BvunzaNo ratings yet
- Finite Difference Methods For Two-Point Boundary Value Prob-LemsDocument3 pagesFinite Difference Methods For Two-Point Boundary Value Prob-LemsasasdNo ratings yet
- 02rules of DifferentiationDocument16 pages02rules of DifferentiationAtta SoomroNo ratings yet
- 05.applications of Definite Integrals - TDocument15 pages05.applications of Definite Integrals - TEverything What U WantNo ratings yet
- PR 8 Aero Komputasi Rizqy Agung - 13617072Document16 pagesPR 8 Aero Komputasi Rizqy Agung - 13617072Rizqy AgungNo ratings yet
- Numerical Integration N6Document23 pagesNumerical Integration N6HayderyNo ratings yet
- ECE 3040 Lecture 9: Taylor Series Approximation II: © Prof. Mohamad HassounDocument23 pagesECE 3040 Lecture 9: Taylor Series Approximation II: © Prof. Mohamad HassounKen ZhengNo ratings yet
- Exam Review QuestionsDocument2 pagesExam Review QuestionsLoje LabNo ratings yet
- A Comment On Methods To Deal With Divergent Series and IntegralsDocument14 pagesA Comment On Methods To Deal With Divergent Series and Integralseljose1234100% (2)
- Maulina Putri Lestari - M0220052 - Tugas 1Document5 pagesMaulina Putri Lestari - M0220052 - Tugas 1Maulina Putri LestariNo ratings yet
- TAREA 3 Rosas Perez ErikaDocument12 pagesTAREA 3 Rosas Perez ErikaRosas Pérez Erika ArlethNo ratings yet
- Differential CalculusDocument51 pagesDifferential CalculusCheenee RiveraNo ratings yet
- Maulina Putri Lestari - M0220052 - Tugas 3Document10 pagesMaulina Putri Lestari - M0220052 - Tugas 3Maulina Putri LestariNo ratings yet
- Solution For WA1-v2Document2 pagesSolution For WA1-v2mariaalmasri00No ratings yet
- Numerical Methods For CSE Problem Sheet 4: Problem 1. Order of Convergence From Error Recursion (Core Prob-Lem)Document14 pagesNumerical Methods For CSE Problem Sheet 4: Problem 1. Order of Convergence From Error Recursion (Core Prob-Lem)DANIEL ALEJANDRO VARGAS UZURIAGANo ratings yet
- QUARTER - 3 - / SEMESTER - 2nd - Week 7Document10 pagesQUARTER - 3 - / SEMESTER - 2nd - Week 7Tristan Paul PagalananNo ratings yet
- Remarks On Chapter 5 in L. Trefethen: Spectral Methods in MATLABDocument8 pagesRemarks On Chapter 5 in L. Trefethen: Spectral Methods in MATLABTri NguyenNo ratings yet
- Chapter 7dDocument16 pagesChapter 7dSuman SamaiNo ratings yet
- Unit-II - (Vector Integration - New)Document26 pagesUnit-II - (Vector Integration - New)Sunay B SNo ratings yet
- Unit 3 PDFDocument35 pagesUnit 3 PDFRogz BautistaNo ratings yet
- Chapter 4 Functions and GraphDocument67 pagesChapter 4 Functions and Graphabdullahhaiyan786No ratings yet
- Lesson 13Document7 pagesLesson 13Jayron John Puguon AquinoNo ratings yet
- Maths MSDocument12 pagesMaths MSUNDERWORLD MAFIANo ratings yet
- Extra Problems For FinalDocument5 pagesExtra Problems For FinalleeNo ratings yet
- MAT2002 Assignment 1Document4 pagesMAT2002 Assignment 1sigfried rigmundNo ratings yet
- Assignment 4Document2 pagesAssignment 4snehilgamit04No ratings yet
- Tutorial 4 SolutionsDocument10 pagesTutorial 4 Solutionssama abd elgelilNo ratings yet
- Green Theorem QuestionDocument20 pagesGreen Theorem QuestionBarnedNo ratings yet
- Day-11: Section 13.7 Tangent Planes and Normal VectorsDocument13 pagesDay-11: Section 13.7 Tangent Planes and Normal VectorsFaizaNo ratings yet
- GEn Math Lecture NotesDocument12 pagesGEn Math Lecture NotesAna Marie Valenzuela100% (1)
- Legth of Plane CurvesDocument7 pagesLegth of Plane Curvesbahadir korkutanNo ratings yet
- MP01 Genmath Week01 Functions GreenDocument53 pagesMP01 Genmath Week01 Functions Greenfelix florentinoNo ratings yet
- LECTURE 1 Revised 2 10122020Document5 pagesLECTURE 1 Revised 2 10122020Joy Rianne HoriqueNo ratings yet
- Functions: Prepared: Selvarani NasaratnamDocument8 pagesFunctions: Prepared: Selvarani NasaratnamSelvarani NasaratnamNo ratings yet
- Lesson 1 Mat183Document11 pagesLesson 1 Mat183itsmeliyaarmyNo ratings yet
- Lesson 3 Math 311Document22 pagesLesson 3 Math 311mc604011No ratings yet
- 3.1 The Double Integral and Rectangular RegionsDocument8 pages3.1 The Double Integral and Rectangular Regionsshamarplummer0923No ratings yet
- 6-Lecture-Special Functions MAT - M Sc-IVDocument7 pages6-Lecture-Special Functions MAT - M Sc-IVMadina GraphicsNo ratings yet
- Techniques of IntegrationDocument7 pagesTechniques of IntegrationMero MahmoudNo ratings yet
- SLG 2.2.1 Piecewise-Defined Functions (Session 1 of 2)Document9 pagesSLG 2.2.1 Piecewise-Defined Functions (Session 1 of 2)jvvuvuuv lopezNo ratings yet
- Numerical Methods: Finite Difference Approach: Lecture-13Document14 pagesNumerical Methods: Finite Difference Approach: Lecture-13Jerry boyNo ratings yet
- RevisionExercises List4 SolutionsDocument8 pagesRevisionExercises List4 SolutionsTeresa EsquívelNo ratings yet
- ECE 3040 Lecture 18: Curve Fitting by Least-Squares-Error RegressionDocument38 pagesECE 3040 Lecture 18: Curve Fitting by Least-Squares-Error RegressionKen ZhengNo ratings yet
- 00 HW Functions SolutionsDocument5 pages00 HW Functions SolutionsMaxNo ratings yet
- TD FunctionsDocument8 pagesTD FunctionsMR NOBODYNo ratings yet
- MTH 102 Chapter OneDocument13 pagesMTH 102 Chapter OneMuhammad AbdulazizNo ratings yet
- 2.2 The Derivative FunctionDocument16 pages2.2 The Derivative FunctionlegoNo ratings yet
- CalcvarDocument5 pagesCalcvarKumardeep MukhopadhyayNo ratings yet
- Studying Some Approaches To Estimate The Smoothing Parameter For The Nonparametric Regression ModelDocument11 pagesStudying Some Approaches To Estimate The Smoothing Parameter For The Nonparametric Regression ModelÚt NhỏNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- NetspeedDocument1 pageNetspeededuardolarangeiraNo ratings yet
- Sgpipe 001Document1 pageSgpipe 001eduardolarangeiraNo ratings yet
- Final Exam Exercise 2Document2 pagesFinal Exam Exercise 2eduardolarangeiraNo ratings yet
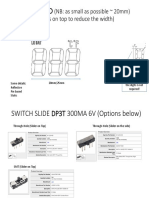
- Sketch of LCD and Switch Requirement Rev2Document2 pagesSketch of LCD and Switch Requirement Rev2eduardolarangeiraNo ratings yet
- Building Better Products With FEA Analysis Pg.17Document9 pagesBuilding Better Products With FEA Analysis Pg.17eduardolarangeiraNo ratings yet
- HP 9000 rp5430 (L1500) Servers - Server rp5400 - rp5405 - rp5430 - rp5450 - rp5470 - OverviewDocument3 pagesHP 9000 rp5430 (L1500) Servers - Server rp5400 - rp5405 - rp5430 - rp5450 - rp5470 - OverviewPOLLYCORPNo ratings yet
- 1st To 6th BSC AllDocument35 pages1st To 6th BSC Allشامخ يمانيNo ratings yet
- Nipo ODIN VariablesDocument3 pagesNipo ODIN VariablesTejasvi HegdeNo ratings yet
- Web Programming With Python and JavascriptDocument66 pagesWeb Programming With Python and JavascriptMoudi MouhamadouNo ratings yet
- EXCEL Practice ActivitiesDocument3 pagesEXCEL Practice Activitiescatalina doogaruNo ratings yet
- WFC70 ConfiguringHolidays PDFDocument30 pagesWFC70 ConfiguringHolidays PDFmandapatiNo ratings yet
- Simulation With AirMagnet Survey Using Heat Maps Inside Indoor Scenarios in Wireless Local Area NetworksDocument5 pagesSimulation With AirMagnet Survey Using Heat Maps Inside Indoor Scenarios in Wireless Local Area NetworksInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Mifos - Data - SheetJuly 2015 PDFDocument4 pagesMifos - Data - SheetJuly 2015 PDFmariaduque9No ratings yet
- Figure 2: Hybrid Re-Engineering TracksDocument12 pagesFigure 2: Hybrid Re-Engineering TracksFortune MinerNo ratings yet
- Business Trip DurationDocument6 pagesBusiness Trip Durationhamdy20017121No ratings yet
- MPU6050 Pinout, Configuration, Features, Arduino Interfacing & DatasheetDocument8 pagesMPU6050 Pinout, Configuration, Features, Arduino Interfacing & DatasheetAhmad Khanif FikriNo ratings yet
- Shonkwiler R., Lefton L. An Introduction To Parallel and Vector Scientific Computing (CUP, 2006) (ISBN 052186478X) (303s) - CsAl - PDFDocument303 pagesShonkwiler R., Lefton L. An Introduction To Parallel and Vector Scientific Computing (CUP, 2006) (ISBN 052186478X) (303s) - CsAl - PDFYasser Abdella100% (1)
- Tom's MaineDocument3 pagesTom's MaineDynafromNo ratings yet
- Modifying GD&T and FTA in CATIADocument10 pagesModifying GD&T and FTA in CATIAMohammad AlthafNo ratings yet
- Ligand-Based Design Workflow. Paul Hawkins and Geo Skillman OpenEye Scientific SoftwareDocument17 pagesLigand-Based Design Workflow. Paul Hawkins and Geo Skillman OpenEye Scientific SoftwareRangwani NesbitNo ratings yet
- CSCI 332 - Operating Systems - Spring 2023Document8 pagesCSCI 332 - Operating Systems - Spring 2023Dokin NikodNo ratings yet
- Eatree MT5 v2 0 User Guide EnglishDocument41 pagesEatree MT5 v2 0 User Guide EnglishRudi PrayogoNo ratings yet
- Ultrawide Band (Uwb) Architecture PreviewDocument22 pagesUltrawide Band (Uwb) Architecture PreviewminisurabhiNo ratings yet
- 0 ClassNotesDocument144 pages0 ClassNotespaladugu dileep kumar0% (1)
- Pioneer DVH p5950Document94 pagesPioneer DVH p5950Petchi MuthuNo ratings yet
- C Sharp (C#) : Benadir UniversityDocument29 pagesC Sharp (C#) : Benadir UniversityAbdiraxman MaxamedNo ratings yet
- An865a Sia 1Document32 pagesAn865a Sia 1felixsafar3243No ratings yet
- SAP CRM Tax ConfigurationDocument18 pagesSAP CRM Tax Configurationtushar_kansaraNo ratings yet
- Esaote MyLab40 BrochureDocument8 pagesEsaote MyLab40 BrochureDiegoNo ratings yet
- Crash 2021 08 22 - 10.16.08 ServerDocument3 pagesCrash 2021 08 22 - 10.16.08 ServerヴァルキリーしゅんたNo ratings yet
- Client Server Echo Program in JavaDocument3 pagesClient Server Echo Program in JavakrishsmartNo ratings yet
- 95-8533-20.1 - (EQP) Det Tronics PDFDocument145 pages95-8533-20.1 - (EQP) Det Tronics PDFLuchoNo ratings yet
- Laboratory Exercises MS WordDocument4 pagesLaboratory Exercises MS WordESTHER LANCITANo ratings yet