You might also like
- 3 Band Magnetic Loop PDFDocument3 pages3 Band Magnetic Loop PDFbushconnNo ratings yet
- Article Antenna Mag Loop 2Document33 pagesArticle Antenna Mag Loop 2PENIKMAT KOPI VESPA & RADIONo ratings yet
- Magnetic Loop For HF, Amateur BandsDocument15 pagesMagnetic Loop For HF, Amateur BandsDimitrie Strătilă100% (1)
- Flame SensorDocument5 pagesFlame SensorImranRafiqNo ratings yet
- Antenna Article Small Ant EfficiencyDocument144 pagesAntenna Article Small Ant Efficiencyatlantisrd2005100% (1)
- Build a High-Gain Slim Jim Antenna for Ham Radio Bands Under 40 CharactersDocument9 pagesBuild a High-Gain Slim Jim Antenna for Ham Radio Bands Under 40 CharactersAmanda HardyNo ratings yet
- Understanding LEL, UEL and PPMDocument8 pagesUnderstanding LEL, UEL and PPMSherwin Delfin CincoNo ratings yet
- CD Nozzle Technical OverviewDocument4 pagesCD Nozzle Technical OverviewAravind Pradhyumnan BalajiNo ratings yet
- Cavity ResonatorDocument14 pagesCavity ResonatorVenkata RatnamNo ratings yet
- Flow through pipes experimental vs ideal head lossDocument5 pagesFlow through pipes experimental vs ideal head lossPei IngNo ratings yet
- Swirling IncenDocument42 pagesSwirling Incendrop shipNo ratings yet
- Vent Size Imp For Pressure VesselsDocument3 pagesVent Size Imp For Pressure Vesselsthomas_v501925No ratings yet
- Semi Elliptical Head Volume and AreaDocument2 pagesSemi Elliptical Head Volume and AreaRNo ratings yet
- Choosing the Right Positioner: Understanding the Benefits of Analog vs. DigitalDocument33 pagesChoosing the Right Positioner: Understanding the Benefits of Analog vs. DigitalluciaNo ratings yet
- Balun Basics Primer - A Tutorial On Baluns, Balun Transformers, Magic-Ts, and 180° HybridsDocument8 pagesBalun Basics Primer - A Tutorial On Baluns, Balun Transformers, Magic-Ts, and 180° HybridsArun KumarNo ratings yet
- Level Measurement SystemDocument8 pagesLevel Measurement SystemVarun Kumar100% (1)
- Tutorial 06Document7 pagesTutorial 06moon bloodNo ratings yet
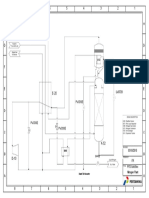
- PFD - Nitrogen Plant UTL Plaju (Cold Box)Document1 pagePFD - Nitrogen Plant UTL Plaju (Cold Box)Julia Dwi LestariNo ratings yet
- LTBHDocument20 pagesLTBHİ. Çağlar YILDIRIMNo ratings yet
- Air CannonDocument2 pagesAir CannonJohn FulksNo ratings yet
- Ows Piping Size2BLDocument3 pagesOws Piping Size2BLreach_arindomNo ratings yet
- Cavity ResonatorDocument20 pagesCavity ResonatorHarsh KaushalyaNo ratings yet
- Newbie Antenna WoesDocument52 pagesNewbie Antenna WoesfooobaaarNo ratings yet
- MC1648 DataSheetDocument11 pagesMC1648 DataSheetKWojtekNo ratings yet
- Demostrador de Antenas ASD512Document4 pagesDemostrador de Antenas ASD512carlosNo ratings yet
- Newnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1From EverandNewnes Electronics Circuits Pocket Book (Linear IC): Newnes Electronics Circuits Pocket Book, Volume 1Rating: 4.5 out of 5 stars4.5/5 (3)
- Zpev 2Document19 pagesZpev 2vissie01No ratings yet
- Infrared Emitter From CMOS 555 Robot RoomDocument6 pagesInfrared Emitter From CMOS 555 Robot RoomnkimlevnNo ratings yet
- ICL8038 Function GeneratorDocument6 pagesICL8038 Function Generatorvali dNo ratings yet
- S.No. TopicsDocument71 pagesS.No. TopicsKratika JainNo ratings yet
- AC Current Monitor by LM358Document14 pagesAC Current Monitor by LM358wlen2012No ratings yet
- Antenna Systems Demostrator ASD512pdfDocument4 pagesAntenna Systems Demostrator ASD512pdfMiguel OrdoñezNo ratings yet
- An Analog Current Controller Design For Laser Diodes: Todd P. MeyrathDocument7 pagesAn Analog Current Controller Design For Laser Diodes: Todd P. MeyrathAfzal345No ratings yet
- Reference Design Low Cost CompassDocument4 pagesReference Design Low Cost CompassHany MaximousNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- 8GE02 0e Active Antennas For RadiomonitoringDocument35 pages8GE02 0e Active Antennas For RadiomonitoringMostafa hdghNo ratings yet
- Integrator Circuits: 7.0.1 ReadingDocument5 pagesIntegrator Circuits: 7.0.1 Readingnaveenkv10_105528408No ratings yet
- ElectronicsDocument18 pagesElectronicsSrinjay BhattacharyaNo ratings yet
- Rangkaian RangkaianDocument30 pagesRangkaian RangkaianAhmad JuheriNo ratings yet
- Sound Activated Intercom DocuDocument15 pagesSound Activated Intercom DocuGanimid AlvarezNo ratings yet
- Power Supply Projects: A Collection of Innovative and Practical Design ProjectsFrom EverandPower Supply Projects: A Collection of Innovative and Practical Design ProjectsRating: 3 out of 5 stars3/5 (2)
- Function Generator XR2206Document8 pagesFunction Generator XR2206and roidNo ratings yet
- LA400 Manual Antenna ActiveDocument14 pagesLA400 Manual Antenna Activedenivaldo2009No ratings yet
- Differential Protection Using ArduinoDocument2 pagesDifferential Protection Using ArduinoMahammad Muneer0% (1)
- Remote Control Fan RegulatorDocument42 pagesRemote Control Fan Regulatorshiningstar_abhi376567% (3)
- Atmel AVR042 Avr Hardware Design Considerations Application Note 7 2013Document17 pagesAtmel AVR042 Avr Hardware Design Considerations Application Note 7 2013Naigel DiasNo ratings yet
- Home Automation Circuit GuideDocument26 pagesHome Automation Circuit GuidePratiksha SharmaNo ratings yet
- Remote Override of Traffic Signals in EmergenciesDocument23 pagesRemote Override of Traffic Signals in EmergenciesDebashishParidaNo ratings yet
- Infrared RaysDocument7 pagesInfrared RaysShree RaiNo ratings yet
- Arduino Waveform Generator: Step 1: Technical ConsiderationsDocument11 pagesArduino Waveform Generator: Step 1: Technical ConsiderationsdheenadayalanNo ratings yet
- Power Failure AlarmDocument17 pagesPower Failure AlarmPurva Patil33% (3)
- 110 Waveform Generator Projects for the Home ConstructorFrom Everand110 Waveform Generator Projects for the Home ConstructorRating: 4 out of 5 stars4/5 (1)
- DiDocument6 pagesDipani256No ratings yet
- Arduino XR-2206 Function GeneratorDocument15 pagesArduino XR-2206 Function GeneratorWagner MirandaNo ratings yet
- Arduino Based Lightning Detector ProjectDocument6 pagesArduino Based Lightning Detector ProjectBenjamin DoverNo ratings yet
- Microwave Integrated Power Detectors: Paul Wade W1GHZ ©2009Document8 pagesMicrowave Integrated Power Detectors: Paul Wade W1GHZ ©2009Jaime LazoNo ratings yet
- Secondary Synchronization Signal in 5G New RadioDocument6 pagesSecondary Synchronization Signal in 5G New Radioyigit ozcanNo ratings yet
- Exp.1 Basic SignalsDocument8 pagesExp.1 Basic SignalsDeepesh AgrawalNo ratings yet
- Fundamental of TelecommunicationDocument28 pagesFundamental of TelecommunicationMofasser Ahmed (Tamal)88% (8)
- Smart Home Technologies: NetworkingDocument89 pagesSmart Home Technologies: NetworkingMaria PattersonNo ratings yet
- Mo FG506-13Document3 pagesMo FG506-13Rafael VeranoNo ratings yet
- Sonet/Sdh: Yaakov (J) Stein Chief Scientist RAD Data CommunicationsDocument110 pagesSonet/Sdh: Yaakov (J) Stein Chief Scientist RAD Data CommunicationsRk ManjunathNo ratings yet
- Reflection Coefficient and VSWRDocument5 pagesReflection Coefficient and VSWREmilio EscalanteNo ratings yet
- Interoperability Report: Alcatel-Lucent OT8118/8128 Motorola Solutions, RFS/NX Controllers AP650/6511/6532/7131Document18 pagesInteroperability Report: Alcatel-Lucent OT8118/8128 Motorola Solutions, RFS/NX Controllers AP650/6511/6532/7131Mohamed SalhiNo ratings yet
- Adc - DacDocument4 pagesAdc - DacShaheer TariqNo ratings yet
- EXPLAIN M05 - 1 Coverage PlanningDocument22 pagesEXPLAIN M05 - 1 Coverage PlanningMiguel Andres Vanegas GNo ratings yet
- Schematic Diagrams: KD-AR270, KD-G220, KD-G227 KD-G321, KD-G322, KD-G323 KD-G324, KD-G325, KD-G326 KD-G327Document50 pagesSchematic Diagrams: KD-AR270, KD-G220, KD-G227 KD-G321, KD-G322, KD-G323 KD-G324, KD-G325, KD-G326 KD-G327electronistulNo ratings yet
- Differential GPS ExplainedDocument5 pagesDifferential GPS Explained87291472BG100% (2)
- 4.1.2.4 Lab - Identifying Network Devices and CablingDocument3 pages4.1.2.4 Lab - Identifying Network Devices and CablingAnonymous YetiFo5kMa0% (1)
- Traffic-Aware Advanced Sleep Modes Management in 5G NetworksDocument7 pagesTraffic-Aware Advanced Sleep Modes Management in 5G NetworksHiba AyoubNo ratings yet
- Review QuestionsDocument9 pagesReview QuestionsAbraham GadissaNo ratings yet
- Analog and Digital Communication-Course Strength Session: Ezhilazhahi - AM (Asst - Prof) ECE dept-ACTDocument25 pagesAnalog and Digital Communication-Course Strength Session: Ezhilazhahi - AM (Asst - Prof) ECE dept-ACTEzhil Azhahi.AM Assistant ProfessorNo ratings yet
- 5g Ran2.0 Channel Management - 1.1Document64 pages5g Ran2.0 Channel Management - 1.1Wawan Aji100% (4)
- CAE Aero and Avi ProjectsDocument73 pagesCAE Aero and Avi ProjectsSabeeh SafdarNo ratings yet
- Passive Optical NetworkDocument21 pagesPassive Optical NetworkSunil ShresthaNo ratings yet
- MycvDocument2 pagesMycvNader RihanNo ratings yet
- 4G Wireless Networks AssignmentDocument6 pages4G Wireless Networks AssignmentStephen OndiekNo ratings yet
- 2G And 3G KPI OptimizationDocument7 pages2G And 3G KPI OptimizationLily PuttNo ratings yet
- Performing Electronic Attack in The US and Canada - CJCS-US-EADocument82 pagesPerforming Electronic Attack in The US and Canada - CJCS-US-EAkhnumdumandfullofcumNo ratings yet
- Phased Array AntennaDocument24 pagesPhased Array AntennaPranabKumarGoswamiNo ratings yet
- Regulatory Requirement of Import Handphone Adapter - Fauziah Fadzil PDFDocument42 pagesRegulatory Requirement of Import Handphone Adapter - Fauziah Fadzil PDFsppramNo ratings yet
- Detecting Broken Rotor Bars in ElectricalDocument5 pagesDetecting Broken Rotor Bars in ElectricalMohd Hasanudin Hamadion100% (1)
- Local Area Network: Suhail Q. MirDocument24 pagesLocal Area Network: Suhail Q. MirSuhail QadirNo ratings yet
- C Pole AntennaDocument3 pagesC Pole AntennaDominique VankeirsbilckNo ratings yet
- Chapter Two: Formatting and Baseband ModulationDocument43 pagesChapter Two: Formatting and Baseband ModulationAhmed Hassan MohammedNo ratings yet