You might also like
- Governor TutorialDocument13 pagesGovernor TutorialWalid Fattah100% (1)
- What Is The Difference Between Droop and Isochronous OperationDocument5 pagesWhat Is The Difference Between Droop and Isochronous OperationTonoTony100% (2)
- How Generator Works and Compete With Load Set PointDocument7 pagesHow Generator Works and Compete With Load Set PointLakshmi NarayanNo ratings yet
- Droop Vs IsochronousDocument3 pagesDroop Vs IsochronousSandeep Sans100% (1)
- Droop Vs IsochronousDocument3 pagesDroop Vs IsochronousSuresh K Krishnasamy100% (1)
- Isochronous and DroopDocument15 pagesIsochronous and DroopNadeem Khan100% (1)
- Govenor DroopDocument29 pagesGovenor Droophosein30100% (2)
- If You Have A Speedtronic Mark IV or Mark V or Mark VIDocument55 pagesIf You Have A Speedtronic Mark IV or Mark V or Mark VIAnonymous fDP5ceNo ratings yet
- Droop Setting in TurbineDocument2 pagesDroop Setting in TurbinepurnaNo ratings yet
- Modes of TurbineDocument20 pagesModes of Turbinenabil160874No ratings yet
- Fig. 1a. Overlaid Plot of Voltage (Blue) and Rms Current (Red) of A Motor Start As A Function ofDocument5 pagesFig. 1a. Overlaid Plot of Voltage (Blue) and Rms Current (Red) of A Motor Start As A Function ofTapi SkNo ratings yet
- TN16 - Sensor Selection GuideDocument13 pagesTN16 - Sensor Selection GuideAsitha KulasekeraNo ratings yet
- Coupling Failures in VFD Motor Fan: Torsional VibrationDocument15 pagesCoupling Failures in VFD Motor Fan: Torsional VibrationCairo Oil Refining Co.100% (1)
- Case Study Tuning Out Difficult Torsional Vibration ProblemDocument15 pagesCase Study Tuning Out Difficult Torsional Vibration Problempathakshashank100% (1)
- Governing of Turbine HydraulicDocument3 pagesGoverning of Turbine HydraulicMike100% (1)
- Why Do Surge Testing?Document4 pagesWhy Do Surge Testing?astromo100% (1)
- Vibration Analysis1Document68 pagesVibration Analysis1mister pogi0% (1)
- Compressor Map Prediction Tool: IOP Conference Series: Materials Science and EngineeringDocument11 pagesCompressor Map Prediction Tool: IOP Conference Series: Materials Science and Engineeringthlim19078656No ratings yet
- Introduction To Automatic SynchronizingDocument12 pagesIntroduction To Automatic SynchronizingGavaskar GovindarajNo ratings yet
- Vibration Analysis2Document59 pagesVibration Analysis2mister pogiNo ratings yet
- Bently Reverse Rotation ProtectionDocument6 pagesBently Reverse Rotation ProtectionDipti BhanjaNo ratings yet
- Turbo SupervisionDocument140 pagesTurbo SupervisionRamalingamNo ratings yet
- Lesson Mechanalysis - The Key To Machinery ConditionDocument13 pagesLesson Mechanalysis - The Key To Machinery Conditionmister pogiNo ratings yet
- O&M - TurbineDocument108 pagesO&M - TurbineRam KrishnaNo ratings yet
- OELDocument6 pagesOELjunsanaNo ratings yet
- Understanding Shaft Voltage and Grounding Currents of Turbine GeneratorsDocument12 pagesUnderstanding Shaft Voltage and Grounding Currents of Turbine GeneratorsJose PradoNo ratings yet
- Generator Protection Relay DGP ManualDocument278 pagesGenerator Protection Relay DGP ManualArif KhattakNo ratings yet
- Vibration Monitoring Reveals Foundation IssueDocument53 pagesVibration Monitoring Reveals Foundation IssueAmit Singh DehuryNo ratings yet
- Plane Balancing of Rotors PresentationDocument29 pagesPlane Balancing of Rotors PresentationOleg1142No ratings yet
- Synchronous Motor Test TestDocument5 pagesSynchronous Motor Test TestChidamparam PalaniyappanNo ratings yet
- Load SheddingDocument4 pagesLoad SheddingMuhammad RooshanNo ratings yet
- Liquid Propellant Rocket Engine Control SystemsDocument73 pagesLiquid Propellant Rocket Engine Control Systemsnandakumar kalyanNo ratings yet
- Rotor balancing simulator projectDocument38 pagesRotor balancing simulator projectMahmoud SamirNo ratings yet
- Swirl AngleDocument3 pagesSwirl AngleNIGERE100% (4)
- Chandra Gupt Porwal, CMD, NIMDC PVT LTD.Document13 pagesChandra Gupt Porwal, CMD, NIMDC PVT LTD.CHANDRA GUPT PORWALNo ratings yet
- Axial PositionDocument23 pagesAxial PositionArif Insurgent67% (3)
- TB KeyPerformanceEvaluation PDFDocument2 pagesTB KeyPerformanceEvaluation PDFvcharles100% (1)
- CAT - G3516H Temperature Ratio of Coolant To Oil Is Low PDFDocument3 pagesCAT - G3516H Temperature Ratio of Coolant To Oil Is Low PDFwagner_guimarães_1No ratings yet
- 12MW Logic Writeup 62OP42338 - U1 - 625040022RDocument13 pages12MW Logic Writeup 62OP42338 - U1 - 625040022RPrima WesiNo ratings yet
- Generator Protection PPT TurboDocument29 pagesGenerator Protection PPT TurbocheshankarNo ratings yet
- Sizing Generators for Leading Power Factor OperationDocument9 pagesSizing Generators for Leading Power Factor Operation최형식No ratings yet
- Continuous torque monitoring improves predictive maintenanceDocument13 pagesContinuous torque monitoring improves predictive maintenancemlouredocasadoNo ratings yet
- Axial Displacement: Understanding the Hazards of Excessive Axial MotionDocument7 pagesAxial Displacement: Understanding the Hazards of Excessive Axial MotionYudha SimbolonNo ratings yet
- Stator and Rotor Winding Ground Protection FailuresDocument46 pagesStator and Rotor Winding Ground Protection FailuresSalvador ArcosNo ratings yet
- ATPOL II - FULL Pattern Recognition ManualDocument44 pagesATPOL II - FULL Pattern Recognition ManualDaniel AguilarNo ratings yet
- Torsional Vibration Analysis of Reciprocating Compressor Trains Driven B...Document11 pagesTorsional Vibration Analysis of Reciprocating Compressor Trains Driven B...fuzhi2016No ratings yet
- Centrifugal Compressor Vibrations: Oil & Gas Customer Training CenterDocument44 pagesCentrifugal Compressor Vibrations: Oil & Gas Customer Training CenterBrahim Rostane100% (1)
- Short Course: Motor Current Signature Analysis FOR Diagnosis of Faults in Induction Motor DrivesDocument20 pagesShort Course: Motor Current Signature Analysis FOR Diagnosis of Faults in Induction Motor Drivessubha_yavanaNo ratings yet
- Introduction to Machinery Vibration and Noise CharacteristicsDocument34 pagesIntroduction to Machinery Vibration and Noise Characteristicsmister pogiNo ratings yet
- Seal Oil and Hydrogen SystemDocument34 pagesSeal Oil and Hydrogen Systemashish_ntpcNo ratings yet
- Gas Turbine Control ParametersDocument16 pagesGas Turbine Control Parameterstetsa zangetsuNo ratings yet
- Synchronous Generator: How Rotor and Stator Magnetic Fields InteractDocument42 pagesSynchronous Generator: How Rotor and Stator Magnetic Fields InteractLeelananda100% (1)
- Isochronous and Droop Speed Control ModesDocument12 pagesIsochronous and Droop Speed Control ModesSanjeet Saud100% (2)
- CSA 17 September, 2009 - 5:58 PM: by OnDocument11 pagesCSA 17 September, 2009 - 5:58 PM: by OnJagadish Patra100% (1)
- Excitation ControlDocument35 pagesExcitation ControlLibyanManNo ratings yet
- How gas turbines increase electrical load by boosting fuel flowDocument10 pagesHow gas turbines increase electrical load by boosting fuel flowabhijit.adgube3376No ratings yet
- LOAD FREQUENCY CONTROL KEEPS GRID STABLEDocument5 pagesLOAD FREQUENCY CONTROL KEEPS GRID STABLEsrikaanth06100% (2)
- ISOC Control GenreatorsDocument4 pagesISOC Control GenreatorsStuart Robinson100% (1)
- In An Isolated System Prime Mover Generator May Operate in Droop Mode and Isochronous ModeDocument7 pagesIn An Isolated System Prime Mover Generator May Operate in Droop Mode and Isochronous ModeSabeeh Hasnain100% (1)
- CH 08Document8 pagesCH 08ArdvarkNo ratings yet
- Harolds Partial Fractions Cheat Sheet 2016Document2 pagesHarolds Partial Fractions Cheat Sheet 2016ArdvarkNo ratings yet
- EE 1103 Basic Electrical Engineering Phasor AlgebraDocument48 pagesEE 1103 Basic Electrical Engineering Phasor AlgebraGustavo PérezNo ratings yet
- CH 10Document9 pagesCH 10ArdvarkNo ratings yet
- Problem 7.65: SolutionDocument1 pageProblem 7.65: SolutionArdvarkNo ratings yet
- Integration Rules and TechniquesDocument6 pagesIntegration Rules and TechniquesUmar LaghariNo ratings yet
- IELTS Study PlannerDocument7 pagesIELTS Study PlannerArdvarkNo ratings yet
- Ielts Academic Task 1Document59 pagesIelts Academic Task 1Ammar Mustafa Mahadi Alzein93% (41)
- Practice Differentiation ProblemsDocument6 pagesPractice Differentiation ProblemsArdvarkNo ratings yet
- Instrumentation in Hazardous AreasDocument12 pagesInstrumentation in Hazardous AreasArdvarkNo ratings yet
- Improving Control System Security with ISA/IEC 62443 StandardsDocument12 pagesImproving Control System Security with ISA/IEC 62443 StandardsArdvarkNo ratings yet
- Phasor Algebra ExplainedDocument20 pagesPhasor Algebra ExplainedArdvarkNo ratings yet
- VALVES - 28 - Butteryfly - PVC and CPVCDocument17 pagesVALVES - 28 - Butteryfly - PVC and CPVCAdditya ChoudhharyNo ratings yet
- Ielts Writing Task 2 Cheat Sheet'Document37 pagesIelts Writing Task 2 Cheat Sheet'Patel hasmukhbhaiNo ratings yet
- Instruction Manual: Electro-Pneumatic Valve PositionersDocument31 pagesInstruction Manual: Electro-Pneumatic Valve PositionersArdvarkNo ratings yet
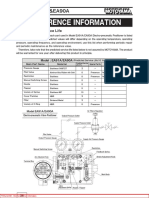
- Reference Information 9: Model EA91A EA90ADocument1 pageReference Information 9: Model EA91A EA90AArdvarkNo ratings yet
- 9 Reference Information: Model EA91A EA90ADocument1 page9 Reference Information: Model EA91A EA90AArdvarkNo ratings yet
- 3BUA000150-600 A en System 800xa Asset Optimization 6.0 OperationDocument202 pages3BUA000150-600 A en System 800xa Asset Optimization 6.0 OperationArdvarkNo ratings yet
- Reliablity Issue at Ca 2 - 680552332Document73 pagesReliablity Issue at Ca 2 - 680552332ArdvarkNo ratings yet
- Facility Sitting Methodology ChartDocument5 pagesFacility Sitting Methodology ChartArdvarkNo ratings yet
- RMA Control System Redundancy MHSEDocument4 pagesRMA Control System Redundancy MHSEArdvarkNo ratings yet
- Modern Instrumentation Simplifies MaintenanceDocument9 pagesModern Instrumentation Simplifies MaintenanceArdvarkNo ratings yet
- PH Analyzers & Detectors Reliability EnhancementDocument23 pagesPH Analyzers & Detectors Reliability EnhancementArdvarkNo ratings yet
- Chapter 13 EX Wiring MethodsDocument51 pagesChapter 13 EX Wiring Methodsmaurice86No ratings yet
- Online Condition Monitoring of Critical MachinesDocument35 pagesOnline Condition Monitoring of Critical MachinesArdvark100% (1)
- FAQ Explosion ProofDocument1 pageFAQ Explosion ProofudamuruNo ratings yet
- D1S4A Implementation EI Installation in Haz Area Classification PHE ONWJ PDFDocument53 pagesD1S4A Implementation EI Installation in Haz Area Classification PHE ONWJ PDFhkaruvathilNo ratings yet
- Positioner Cabling Best PracticesDocument160 pagesPositioner Cabling Best PracticesArdvarkNo ratings yet
- OSHA Cable TraysDocument2 pagesOSHA Cable TraysYousuf IbrahimNo ratings yet
- Automatic or Grab Sampling For Hazardous ChemicalsDocument28 pagesAutomatic or Grab Sampling For Hazardous ChemicalsArdvarkNo ratings yet
- Ignition Key Number Stamped Position: Starter Motor Will Not OperateDocument1 pageIgnition Key Number Stamped Position: Starter Motor Will Not Operategreaternorthroad8820No ratings yet
- Orbit27999 Manual PDFDocument32 pagesOrbit27999 Manual PDFDanno NNo ratings yet
- Farm Collector-September 2021Document62 pagesFarm Collector-September 2021Ionut GabrielNo ratings yet
- BSA M20 Maintenance ManualDocument55 pagesBSA M20 Maintenance ManualAlok Balsekar100% (1)
- F100 Engine Components: Part Name Part Number CommentsDocument2 pagesF100 Engine Components: Part Name Part Number CommentsMASOUDNo ratings yet
- SSP 840193. 3.0 Liter V6 TDI. Clean Diesel EngineDocument108 pagesSSP 840193. 3.0 Liter V6 TDI. Clean Diesel EngineFernando García100% (2)
- 4045AFM85 and 4045SFM85 Marine Engine Installation Instructions For Double Wall Fuel Line KitDocument44 pages4045AFM85 and 4045SFM85 Marine Engine Installation Instructions For Double Wall Fuel Line KitKrieteNo ratings yet
- Service Manual: Tennant A80Document33 pagesService Manual: Tennant A80Павел КорчагинNo ratings yet
- VIT University SMEC Thermal Engineering Systems assignmentDocument4 pagesVIT University SMEC Thermal Engineering Systems assignmentVedant KarnatakNo ratings yet
- M100-10 (M-MA Meters) - V3 - 2.11.19 - 1Document28 pagesM100-10 (M-MA Meters) - V3 - 2.11.19 - 1ronald mudimuNo ratings yet
- Bosch Rexroth Gear Pumps and MotorsDocument7 pagesBosch Rexroth Gear Pumps and Motorsnemuriciu232No ratings yet
- Vibration and Balance Issues Resulting From Keyway FittingDocument22 pagesVibration and Balance Issues Resulting From Keyway FittingsanthoshNo ratings yet
- Failure Code Display Algorithm ExplainedDocument4 pagesFailure Code Display Algorithm Explainedalcowo100% (1)
- Xv250 Torque Values and Screw SizesDocument2 pagesXv250 Torque Values and Screw Sizesmatute62No ratings yet
- MAHLE Product Catalog Cat 3116 Dijelovi MotoraDocument18 pagesMAHLE Product Catalog Cat 3116 Dijelovi MotoraMile BelojicaNo ratings yet
- P01 P09 PDFDocument9 pagesP01 P09 PDFSankar BabuNo ratings yet
- Part Cat-Soil Compactor BW 212Document218 pagesPart Cat-Soil Compactor BW 212Dhru Ti100% (7)
- Despiece Ehfb10t4ssDocument3 pagesDespiece Ehfb10t4ssCarmen Adriana Garcia MendozaNo ratings yet
- Balancing Act of The Fulcrum Examples: Jason LauraDocument9 pagesBalancing Act of The Fulcrum Examples: Jason LauraLykaNo ratings yet
- 2011 Ford Explorer 3.5L Ti-VCT Engine: Key FeaturesDocument2 pages2011 Ford Explorer 3.5L Ti-VCT Engine: Key Featuresraumil1237590No ratings yet
- HDP 172Document4 pagesHDP 172Nahid RahmaniNo ratings yet
- Marine Propulsion: Tailored Solutions ForDocument8 pagesMarine Propulsion: Tailored Solutions ForramsesiNo ratings yet
- Hour Meter: Component Tracking - Lac Des Iles Mines LTDDocument7 pagesHour Meter: Component Tracking - Lac Des Iles Mines LTDgrtyyNo ratings yet
- Modifikasi Socket Fuel Pressure Sensor Pada Engine Model Saa12v140e-3 Unit HD Di Pt. United Tractors Sims Site Batu Kajang Kalimantan Timur PDFDocument90 pagesModifikasi Socket Fuel Pressure Sensor Pada Engine Model Saa12v140e-3 Unit HD Di Pt. United Tractors Sims Site Batu Kajang Kalimantan Timur PDFsartono indo fransNo ratings yet
- How Dishwashers Work: A Guide to Components and CyclesDocument11 pagesHow Dishwashers Work: A Guide to Components and CyclesMuhammad Tayyab Madni100% (1)
- Indigo Manza Quadrajet SafireDocument188 pagesIndigo Manza Quadrajet SafireSujeet RanjanNo ratings yet
- E C M InputsDocument12 pagesE C M InputsMario RaafatNo ratings yet
- Assignment 2 PP PDFDocument21 pagesAssignment 2 PP PDFjamesplanetearthNo ratings yet
- John Deere - Parts Catalog - Frame 5 - 60D Power Flow HeadDocument2 pagesJohn Deere - Parts Catalog - Frame 5 - 60D Power Flow Headbruno.menezesNo ratings yet
- Friction SpinningDocument2 pagesFriction SpinningShailendra MishraNo ratings yet
- The Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionFrom EverandThe Innovators: How a Group of Hackers, Geniuses, and Geeks Created the Digital RevolutionRating: 4.5 out of 5 stars4.5/5 (543)
- Practical Electronics for Inventors, Fourth EditionFrom EverandPractical Electronics for Inventors, Fourth EditionRating: 4 out of 5 stars4/5 (3)
- Conquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeFrom EverandConquering the Electron: The Geniuses, Visionaries, Egomaniacs, and Scoundrels Who Built Our Electronic AgeRating: 5 out of 5 stars5/5 (8)
- Teach Yourself Electricity and Electronics, 6th EditionFrom EverandTeach Yourself Electricity and Electronics, 6th EditionRating: 3.5 out of 5 stars3.5/5 (15)
- Upcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)From EverandUpcycled Technology: Clever Projects You Can Do With Your Discarded Tech (Tech gift)Rating: 4.5 out of 5 stars4.5/5 (2)
- 2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersFrom Everand2022 Adobe® Premiere Pro Guide For Filmmakers and YouTubersRating: 5 out of 5 stars5/5 (1)
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- C++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingFrom EverandC++ Programming Language: Simple, Short, and Straightforward Way of Learning C++ ProgrammingRating: 4 out of 5 stars4/5 (1)
- Open Radio Access Network (O-RAN) Systems Architecture and DesignFrom EverandOpen Radio Access Network (O-RAN) Systems Architecture and DesignNo ratings yet
- Pocket Guide to Flanges, Fittings, and Piping DataFrom EverandPocket Guide to Flanges, Fittings, and Piping DataRating: 3.5 out of 5 stars3.5/5 (22)
- Practical Electrical Wiring: Residential, Farm, Commercial, and IndustrialFrom EverandPractical Electrical Wiring: Residential, Farm, Commercial, and IndustrialRating: 3.5 out of 5 stars3.5/5 (3)
- Lithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsFrom EverandLithium-Ion Battery: The Power of Electric Vehicles with Basics, Design, Charging technology & Battery Management SystemsRating: 5 out of 5 stars5/5 (2)
- The Graphene Revolution: The Weird Science of the Ultra-thinFrom EverandThe Graphene Revolution: The Weird Science of the Ultra-thinRating: 4.5 out of 5 stars4.5/5 (4)
- The Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesFrom EverandThe Phone Fix: The Brain-Focused Guide to Building Healthy Digital Habits and Breaking Bad OnesRating: 5 out of 5 stars5/5 (1)
- ARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)From EverandARDUINO CODE: Mastering Arduino Programming for Embedded Systems (2024 Guide)No ratings yet
- Gas-Liquid And Liquid-Liquid SeparatorsFrom EverandGas-Liquid And Liquid-Liquid SeparatorsRating: 3.5 out of 5 stars3.5/5 (3)
- Power Quality in Power Systems and Electrical MachinesFrom EverandPower Quality in Power Systems and Electrical MachinesRating: 4.5 out of 5 stars4.5/5 (11)
- Off-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemFrom EverandOff-Grid Projects: Step-by-Step Guide to Building Your Own Off-Grid SystemNo ratings yet