You might also like
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Rating: 2.5 out of 5 stars2.5/5 (3)
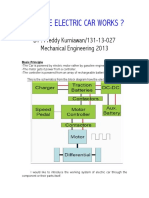
- How The Electric Car WorksDocument6 pagesHow The Electric Car WorksFreddy KurniawanNo ratings yet
- Partial Discharge IEC 60270Document9 pagesPartial Discharge IEC 60270Kamal Tomar0% (9)
- Absolute Pressure Sensor: FunctionDocument48 pagesAbsolute Pressure Sensor: FunctionLuisfernando TovarsanchezNo ratings yet
- 04493430Document7 pages04493430Krishna KarthikNo ratings yet
- BJT Small SignalDocument56 pagesBJT Small SignalMohammad Gulam AhamadNo ratings yet
- The Papermaking ProcessDocument4 pagesThe Papermaking ProcessL Deepanti PunjabanNo ratings yet
- Unidrive SP Elevator Issue 1Document100 pagesUnidrive SP Elevator Issue 1thanggimme.phanNo ratings yet
- An Introduction To Brushless DC Motor ControlDocument33 pagesAn Introduction To Brushless DC Motor ControlIgor TrimcevskiNo ratings yet
- Ev Engine ResearchDocument15 pagesEv Engine ResearchAnshul YadavNo ratings yet
- General Functioning of Various Parts of Electric CarsDocument10 pagesGeneral Functioning of Various Parts of Electric CarsRahul PalNo ratings yet
- Inspection Checklist For Installation of Earthing SystemDocument4 pagesInspection Checklist For Installation of Earthing SystemShahir Ibrahimi100% (2)
- Diesel LocomotivesDocument20 pagesDiesel LocomotivesAashish Singhal100% (2)
- Power Generation Through Speed BreakersDocument22 pagesPower Generation Through Speed BreakersSaikumar MysaNo ratings yet
- EIM Grade 8 Modules and Activity SheetsDocument41 pagesEIM Grade 8 Modules and Activity SheetsJessie Olantigue78% (9)
- Mason-The Art & Science of Protective Relaying (002-010)Document9 pagesMason-The Art & Science of Protective Relaying (002-010)Marian Arjona100% (1)
- Induction Motor: Principle of OperationDocument7 pagesInduction Motor: Principle of OperationAbhishek ChibNo ratings yet
- Vlsi Very Imp QaDocument38 pagesVlsi Very Imp QaAjay Kumar MattupalliNo ratings yet
- Discovery of BLDC Motor: Brushless vs. Brushed DC MotorDocument9 pagesDiscovery of BLDC Motor: Brushless vs. Brushed DC MotorNoni MaheshwariNo ratings yet
- EGEE 203L - Experiment 5 ChrisDocument12 pagesEGEE 203L - Experiment 5 Chrisaguinaga9No ratings yet
- Chapter III - Electrical Power Generation Using Speed Breaker - Jefferson BeloDocument6 pagesChapter III - Electrical Power Generation Using Speed Breaker - Jefferson BeloJefferson BeloNo ratings yet
- Fabrication of Automatic Side Stand Braking Mechanism For Two WheelerDocument28 pagesFabrication of Automatic Side Stand Braking Mechanism For Two Wheelergnana muruganNo ratings yet
- Electric Motor Cycle and ScooterDocument9 pagesElectric Motor Cycle and ScooterA A.DevanandhNo ratings yet
- Automatic Street Light That Is Powered Through Speed Breaker Chapter - 1Document54 pagesAutomatic Street Light That Is Powered Through Speed Breaker Chapter - 1Anu GraphicsNo ratings yet
- Brake Pad Actuation Using Electromagnetic Coils: Original ArticleDocument5 pagesBrake Pad Actuation Using Electromagnetic Coils: Original ArticleDawit Getachew MelsselNo ratings yet
- Induction Current Braking SystemDocument58 pagesInduction Current Braking SystemVinod SoniNo ratings yet
- Regenerative Braking of Series-Wound Brushed DC Electric Motors For Electric VehiclesDocument6 pagesRegenerative Braking of Series-Wound Brushed DC Electric Motors For Electric Vehiclesbeastlt12No ratings yet
- 12 - Chapter 6Document23 pages12 - Chapter 6Gunal KuttyNo ratings yet
- Shock AbaborDocument29 pagesShock AbaborlucasNo ratings yet
- Literature Review of BLDCDocument6 pagesLiterature Review of BLDCsushil63666No ratings yet
- Reaction PaperDocument6 pagesReaction PaperAngelo Escoro Dante100% (1)
- DYNAMIC BRAKING OF DC MOTOR 184 FinalDocument5 pagesDYNAMIC BRAKING OF DC MOTOR 184 FinalMuhammad QamarNo ratings yet
- Ggenerator AlternatorDocument4 pagesGgenerator AlternatorShakir FadzliNo ratings yet
- Report On Lecture 37Document3 pagesReport On Lecture 37Surajit SahaNo ratings yet
- Fuzzy Logic Controller For Four Quadrant Operation of Three Phase BLDC MotorDocument5 pagesFuzzy Logic Controller For Four Quadrant Operation of Three Phase BLDC MotorijtetjournalNo ratings yet
- Power Steering System PDFDocument10 pagesPower Steering System PDFDanistergladwinNo ratings yet
- DJDHDJDocument6 pagesDJDHDJAvengersNo ratings yet
- BLDC Motor: 4 Pole 2 Phase Motor OperationDocument10 pagesBLDC Motor: 4 Pole 2 Phase Motor OperationG.R.AzhaguvelSaranya Professor MechanicalNo ratings yet
- Design of A Hybrid Bicycle With Regenerative Braking Using BLDC MotorDocument3 pagesDesign of A Hybrid Bicycle With Regenerative Braking Using BLDC MotorInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Technical: The Performance and Costing of Electric Traction TrainsDocument9 pagesTechnical: The Performance and Costing of Electric Traction TrainsHafsa AlhaddabiNo ratings yet
- Electrical System in AutomobileDocument13 pagesElectrical System in AutomobileRohit kendreNo ratings yet
- What Is Dynamic BrakingDocument10 pagesWhat Is Dynamic BrakinghiteshNo ratings yet
- Electric Motor IT ReportDocument9 pagesElectric Motor IT ReportVincentNo ratings yet
- Ijseas 20160421Document5 pagesIjseas 20160421Bhavika SoodNo ratings yet
- Synopsis: 3.2. D.C. MOTORSDocument3 pagesSynopsis: 3.2. D.C. MOTORSRahul PandeyNo ratings yet
- Dual Axis Solar Panel ComponentsDocument11 pagesDual Axis Solar Panel ComponentsRaj Kothari MNo ratings yet
- Research Paper On DC Motor ControlDocument8 pagesResearch Paper On DC Motor Controlfvgjcq6aNo ratings yet
- 13 EbikeDocument7 pages13 EbikeVignesh SenthilNo ratings yet
- Robotic Trolley For Material HandlingDocument46 pagesRobotic Trolley For Material HandlingSaggy ChhataniNo ratings yet
- DC MotorDocument102 pagesDC MotorTestNo ratings yet
- Current Source InvertersDocument3 pagesCurrent Source InvertersgghussainNo ratings yet
- Assosa University: College of Engineering, Department of Mechanical EngineeringDocument22 pagesAssosa University: College of Engineering, Department of Mechanical EngineeringElijah T DhNo ratings yet
- Regenerative Braking SystemDocument4 pagesRegenerative Braking SystemAkash MishraNo ratings yet
- Solar Tracking System With GSM Monitoring: Report On Stepper Motor DriverDocument30 pagesSolar Tracking System With GSM Monitoring: Report On Stepper Motor DriverRam PrasathNo ratings yet
- Triple Source Utilization of Motor Bike: Dhinesh Kumar.U, Francklin Inbaraj.A, Mathanparthiban.R & A.R.LavanyaDocument9 pagesTriple Source Utilization of Motor Bike: Dhinesh Kumar.U, Francklin Inbaraj.A, Mathanparthiban.R & A.R.Lavanyavicepresident marketingNo ratings yet
- Automatic Rain Operated WiperDocument20 pagesAutomatic Rain Operated WiperAakash SheelvantNo ratings yet
- Overview of Industrial Motor Control SystemsDocument8 pagesOverview of Industrial Motor Control Systemsiwuo4797No ratings yet
- Which Motor Has High Starting Torque and Staring Current DC Motor, Induction Motor or Synchronous Motor?Document26 pagesWhich Motor Has High Starting Torque and Staring Current DC Motor, Induction Motor or Synchronous Motor?NavdeepNo ratings yet
- Dinamic BrakeDocument18 pagesDinamic BrakeSam eagle goodNo ratings yet
- A Novel Method of Designing Multifunctional Electrical VehicleDocument27 pagesA Novel Method of Designing Multifunctional Electrical VehicleSiva ForeviewNo ratings yet
- Design and Fabrication of Electric BicycleDocument4 pagesDesign and Fabrication of Electric BicycleSachinhonnatti SachinhonnattiNo ratings yet
- 1.1 Introduction of Project: 1.1.1 MOTORSDocument37 pages1.1 Introduction of Project: 1.1.1 MOTORSSanjit PanchalNo ratings yet
- Project WorkDocument15 pagesProject Workakif akifnaimNo ratings yet
- Hev M2Document18 pagesHev M2Anandhu ANo ratings yet
- Experiment No.8: Aim: To Study Interfacing of DC Motor With PIC18 Microcontroller Theory: DescriptionDocument5 pagesExperiment No.8: Aim: To Study Interfacing of DC Motor With PIC18 Microcontroller Theory: DescriptionAshwini KothavaleNo ratings yet
- Alternator (Automotive)Document4 pagesAlternator (Automotive)Cornel BicaNo ratings yet
- EL001Document3 pagesEL001L Deepanti PunjabanNo ratings yet
- DetailedDocument1 pageDetailedL Deepanti PunjabanNo ratings yet
- Bottle Filling Station Using PLC AutomationDocument4 pagesBottle Filling Station Using PLC AutomationL Deepanti PunjabanNo ratings yet
- Operating Manual - OBD Link Connector: Phone: +64 6 874 9077Document10 pagesOperating Manual - OBD Link Connector: Phone: +64 6 874 9077fumaNo ratings yet
- LK Distribution Board enDocument1 pageLK Distribution Board enjojokawayNo ratings yet
- Ad 22057Document9 pagesAd 22057davidNo ratings yet
- 1838 TDocument6 pages1838 TPradeesh J NairNo ratings yet
- Ultrasil™ Polymer-Housed Varistar™ Surge Arresters 5 Ka and 10 Ka Class 1 Iec 60099-4 For MV Systems To 36 KVDocument20 pagesUltrasil™ Polymer-Housed Varistar™ Surge Arresters 5 Ka and 10 Ka Class 1 Iec 60099-4 For MV Systems To 36 KVTejo WahonoNo ratings yet
- Newsletter: Electrical Symbols - How To Read Electrical Schematics? #7 ProtectionsDocument9 pagesNewsletter: Electrical Symbols - How To Read Electrical Schematics? #7 ProtectionsIulius CezarNo ratings yet
- Daewoo Cn-001n Dtq-20v1ss DiagramaDocument50 pagesDaewoo Cn-001n Dtq-20v1ss DiagramaReparacion and ElectronicaNo ratings yet
- LAB No: 10: To Build and Analyze DC/DC Buck ConverterDocument10 pagesLAB No: 10: To Build and Analyze DC/DC Buck ConverterManahil AshrafNo ratings yet
- High Voltage Fast-Switching NPN Power Transistor: ApplicationsDocument8 pagesHigh Voltage Fast-Switching NPN Power Transistor: ApplicationsguanteNo ratings yet
- Service Manual: Model NS-LTDVD19-09CADocument54 pagesService Manual: Model NS-LTDVD19-09CALuis MorenoNo ratings yet
- Realworld Maximum Power Point Tracking Simulation of PV System Based On Fuzzy Logic ControlDocument9 pagesRealworld Maximum Power Point Tracking Simulation of PV System Based On Fuzzy Logic ControlArulNo ratings yet
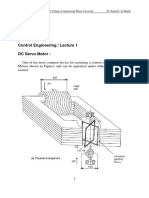
- Control Engineering / Lecture 1 DC Servo MotorDocument7 pagesControl Engineering / Lecture 1 DC Servo Motorjin kazamaNo ratings yet
- Protect 8 S10: Features BenefitsDocument2 pagesProtect 8 S10: Features BenefitsbenNo ratings yet
- Xtcuz1-K (As+) : Toxfree Marine PlusDocument2 pagesXtcuz1-K (As+) : Toxfree Marine PlusomarNo ratings yet
- Falcon Series WebDocument24 pagesFalcon Series WebGratifying SoulNo ratings yet
- Smart PV Controller: Higher Yields Active Safety Flexible CommunicationDocument2 pagesSmart PV Controller: Higher Yields Active Safety Flexible CommunicationRao FarhanNo ratings yet
- Characteristic Analysis of Eddy-Current Brake System Using The Linear Halbach ArrayDocument4 pagesCharacteristic Analysis of Eddy-Current Brake System Using The Linear Halbach ArrayAnjali BiramaneNo ratings yet
- Investigation of Mode Coupling in Step Index Plastic Optical Fibers Using The Power Flow EquationDocument3 pagesInvestigation of Mode Coupling in Step Index Plastic Optical Fibers Using The Power Flow Equationjianing sunNo ratings yet
- NORDAC SK IC1-232/485: Getriebebau NORDDocument4 pagesNORDAC SK IC1-232/485: Getriebebau NORDSean MorrisonNo ratings yet
- Installation Instructions: Protector Trip Relays DIN Rail & Wall Mounted 250 Series Paralleling & Reverse PowerDocument8 pagesInstallation Instructions: Protector Trip Relays DIN Rail & Wall Mounted 250 Series Paralleling & Reverse PowerAnonymous RcxX0FcNo ratings yet
- WIP1Document72 pagesWIP1Lai Yoong LeiNo ratings yet