You might also like
- Signals-and-Systems - Basics & Formula HandbookDocument19 pagesSignals-and-Systems - Basics & Formula HandbookKALAIMATHI100% (15)
- It1252 Digital Signal ProcessingDocument22 pagesIt1252 Digital Signal ProcessingainugiriNo ratings yet
- VHDL Simulation of Fir FilterDocument66 pagesVHDL Simulation of Fir FilterSaurabh Minotra67% (3)
- HW1Document3 pagesHW1Anshu Singh0% (1)
- Mod Usb Rtl8188 DatasheetDocument8 pagesMod Usb Rtl8188 Datasheetpaviliondv6100% (1)
- Digital Signal Processing: Discussion #2 Discrete Time Signals & Systems Tarun Choubisa Dept. of ETC, KIIT UniversityDocument39 pagesDigital Signal Processing: Discussion #2 Discrete Time Signals & Systems Tarun Choubisa Dept. of ETC, KIIT Universitymyself a student of btech 1st yr100% (1)
- Sistemas de Comunicaciones SCT54-1 Signals and Systems: Fabio Suárez Fabiosuarez@itm - Edu.co ITM 2020-1Document26 pagesSistemas de Comunicaciones SCT54-1 Signals and Systems: Fabio Suárez Fabiosuarez@itm - Edu.co ITM 2020-1Jenny OsornoNo ratings yet
- Fourier Analysis of Signals and Systems: Babul IslamDocument24 pagesFourier Analysis of Signals and Systems: Babul IslamapcandyboyNo ratings yet
- Digital Image ProcessingDocument23 pagesDigital Image ProcessingHamza KaleemNo ratings yet
- Chapter 2 Discrete-Time Signals and Systems: IntroductionDocument21 pagesChapter 2 Discrete-Time Signals and Systems: IntroductionYiwen HsiNo ratings yet
- Lecture 9: Brief Summary of Digital Signal Processing.: 1.1 OperationsDocument15 pagesLecture 9: Brief Summary of Digital Signal Processing.: 1.1 OperationsAce SilvestreNo ratings yet
- Uploads 1Document29 pagesUploads 1MnshNo ratings yet
- Review of Discrete-Time Signals and Systems: Henry D. Pfister Based On Notes by Tie Liu February 4, 2019Document31 pagesReview of Discrete-Time Signals and Systems: Henry D. Pfister Based On Notes by Tie Liu February 4, 2019Jose G. TorresNo ratings yet
- Concept of Fourier Analysis:: K N W JWNDocument31 pagesConcept of Fourier Analysis:: K N W JWNSagata BanerjeeNo ratings yet
- Fourier Analysis of Signals and SystemsDocument24 pagesFourier Analysis of Signals and SystemsBabul IslamNo ratings yet
- Digital Signal Processing UWO Lecture+4,+January+18thDocument27 pagesDigital Signal Processing UWO Lecture+4,+January+18thGASR2017No ratings yet
- Ee8591 DSPDocument28 pagesEe8591 DSPtamizh kaviNo ratings yet
- Introducing "Language For Describing Signals and Systems"Document32 pagesIntroducing "Language For Describing Signals and Systems"Vijay VermaNo ratings yet
- 6.003: Signals and Systems-Fall 2002Document10 pages6.003: Signals and Systems-Fall 2002samsritiNo ratings yet
- Formula Notes Signals and SystemsDocument23 pagesFormula Notes Signals and SystemsimmadiuttejNo ratings yet
- Signals and Systems Lecture Note #1: Presentation By: I.Nelson Sl/Ece SSN College of EngineeringDocument36 pagesSignals and Systems Lecture Note #1: Presentation By: I.Nelson Sl/Ece SSN College of Engineeringvasece4537577No ratings yet
- Topic 2 Classification of SignalsDocument12 pagesTopic 2 Classification of SignalsRona SharmaNo ratings yet
- Introduction of Signals and Systems - Part02Document45 pagesIntroduction of Signals and Systems - Part02HermyraJ RobertNo ratings yet
- 1 Signals PDFDocument9 pages1 Signals PDFbpsharmab1p1No ratings yet
- SECA1301 NotesDocument125 pagesSECA1301 NotesJais S.No ratings yet
- Chapter2 New 1Document74 pagesChapter2 New 1RONG YANGNo ratings yet
- Ch1 Signals SystemsDocument25 pagesCh1 Signals SystemskannarpadiNo ratings yet
- DSP - Chapter 2 - A - Discrete-Time SignalsDocument14 pagesDSP - Chapter 2 - A - Discrete-Time SignalsMoiz SiddiquiNo ratings yet
- 5 Discrete Processing of Analog SignalsDocument21 pages5 Discrete Processing of Analog SignalsCHARLES MATHEWNo ratings yet
- S&S - Week 4Document34 pagesS&S - Week 4machasong98No ratings yet
- Principle of Communication EngineeringDocument52 pagesPrinciple of Communication Engineeringسعيد ابوسريعNo ratings yet
- Differnce Between CTFT and DTFTDocument10 pagesDiffernce Between CTFT and DTFTRicha Kaundal0% (1)
- 2 CS2403 FormulaDocument37 pages2 CS2403 FormulasakthirsivarajanNo ratings yet
- Digital Signals and SystemDocument168 pagesDigital Signals and SystemÃbhishék ShàrmåNo ratings yet
- EEE504-Discrete-Time Systems and SamplingDocument15 pagesEEE504-Discrete-Time Systems and SamplingOkewunmi PaulNo ratings yet
- Signals and SystemsDocument23 pagesSignals and SystemsbushNo ratings yet
- ECE438 - Laboratory 2: Discrete-Time SystemsDocument6 pagesECE438 - Laboratory 2: Discrete-Time SystemsMusie WeldayNo ratings yet
- LAB 2: Discrete Time Signals & Linear System ObjectivesDocument12 pagesLAB 2: Discrete Time Signals & Linear System Objectivesmjrahimi.eee2020No ratings yet
- Chapter 1 SlidesDocument30 pagesChapter 1 SlidesALi RaZaNo ratings yet
- Unit 1Document69 pagesUnit 1SivaKumar AnandanNo ratings yet
- Week 2 - Complex Signals, Introduction To Systems (Textbook: Ch. 1.2.7, Ch. 2)Document25 pagesWeek 2 - Complex Signals, Introduction To Systems (Textbook: Ch. 1.2.7, Ch. 2)siarwafaNo ratings yet
- Sec 1208Document92 pagesSec 1208SATYA GOPAL MONDALNo ratings yet
- Note 1470368643Document10 pagesNote 1470368643abhishekNo ratings yet
- Signals and Systems - Unit - IDocument13 pagesSignals and Systems - Unit - Iohmshankar100% (3)
- Faqs PDFDocument35 pagesFaqs PDFJulio César Matute CorderoNo ratings yet
- Lab 2: Sampling, Convolution, LTI Systems, and Difference EquationsDocument5 pagesLab 2: Sampling, Convolution, LTI Systems, and Difference EquationsJane MoujaessNo ratings yet
- Introduction To Signals and Systems-ADocument8 pagesIntroduction To Signals and Systems-Aharold cooperNo ratings yet
- Signal - System - Ch2 (LTIV)Document42 pagesSignal - System - Ch2 (LTIV)Nigar QurbanovaNo ratings yet
- Chapter 1Document18 pagesChapter 1marc.houbinetNo ratings yet
- Topic:Signals, Classification of Signals, Basic Signals..: Electrical DepartmentDocument22 pagesTopic:Signals, Classification of Signals, Basic Signals..: Electrical Departmentrajalakshmi boopathiNo ratings yet
- Signals and Systems: M. Irfan ArshadDocument40 pagesSignals and Systems: M. Irfan ArshadArshad RasheedNo ratings yet
- Review of Signals and SystemsDocument25 pagesReview of Signals and SystemsAdrian TanNo ratings yet
- Digital Signal Processing Important Two Mark Questions With AnswersDocument15 pagesDigital Signal Processing Important Two Mark Questions With AnswerssaiNo ratings yet
- Lecture03 - 04 - EE2231 - Classification of SignalsDocument6 pagesLecture03 - 04 - EE2231 - Classification of Signalsshafin2031010No ratings yet
- Unit I-1Document17 pagesUnit I-1dr.omprakash.itNo ratings yet
- Power Spectral DensityDocument9 pagesPower Spectral DensitySourav SenNo ratings yet
- Digital Signal Processing Lecture+5,+January+20thDocument36 pagesDigital Signal Processing Lecture+5,+January+20thGASR2017No ratings yet
- Fourier Series and Fourier Transforms: Houshou ChenDocument71 pagesFourier Series and Fourier Transforms: Houshou ChenMohamed HamdaouiNo ratings yet
- Problem Sheets 1-9Document23 pagesProblem Sheets 1-9malishaheenNo ratings yet
- No Calculators No Textbook and Notes (Close-Book Exam) Initial On The Top of Each PageDocument9 pagesNo Calculators No Textbook and Notes (Close-Book Exam) Initial On The Top of Each PageYaseenNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Nextion LCDDocument8 pagesNextion LCDAMIR Mahmood0% (1)
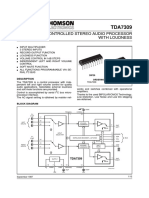
- Digital Controlled Stereo Audio Processor With Loudness: DescriptionDocument13 pagesDigital Controlled Stereo Audio Processor With Loudness: DescriptionJose G MNo ratings yet
- S3A, S3B, S3D, S3G, S3J, S3K, S3M: Vishay General SemiconductorDocument4 pagesS3A, S3B, S3D, S3G, S3J, S3K, S3M: Vishay General Semiconductormahbub metulNo ratings yet
- Dynagen 2014 SpecSheets GSC300Document2 pagesDynagen 2014 SpecSheets GSC300ErmanNo ratings yet
- Adpd7000 3368567Document128 pagesAdpd7000 3368567maxmoron600No ratings yet
- Detailed Solution of IES 2103 (ECE) Objective Paper - I: Set - A'Document12 pagesDetailed Solution of IES 2103 (ECE) Objective Paper - I: Set - A'vijaynarayan guptaNo ratings yet
- RF Unit VSWR Threshold CrossedDocument10 pagesRF Unit VSWR Threshold Crossedgoem67% (3)
- MDD4N20YDocument6 pagesMDD4N20YAmc Forklift ElektrikNo ratings yet
- Digital CommunicationsgDocument8 pagesDigital Communicationsgksln100% (1)
- En Acs850 STD FW Manual FDocument28 pagesEn Acs850 STD FW Manual FcuongvcsNo ratings yet
- 07810@52RD A Novel Coaxial Probe Waveguide To Micro Strip TransitionDocument3 pages07810@52RD A Novel Coaxial Probe Waveguide To Micro Strip TransitionNiraj TevarNo ratings yet
- Lampiran 1. Source CodeDocument31 pagesLampiran 1. Source CodeAinur RizkyNo ratings yet
- Broschüre Standard22 Gyro Compass Retrofit SolutionDocument4 pagesBroschüre Standard22 Gyro Compass Retrofit SolutionTegoeh ANo ratings yet
- Topview Simulator: Software User GuideDocument115 pagesTopview Simulator: Software User GuideYogi Dwi PutraNo ratings yet
- Specification Sheet - SUB 550P (English EU)Document2 pagesSpecification Sheet - SUB 550P (English EU)Cameron RiosNo ratings yet
- 4-20ma Current Loop Signal Generator Manual: (Model:JS-420ISG-V2) First Edition 2018.12Document2 pages4-20ma Current Loop Signal Generator Manual: (Model:JS-420ISG-V2) First Edition 2018.12Mantención FastpackNo ratings yet
- WiFi AntennasDocument41 pagesWiFi Antennastrigunait6288No ratings yet
- MediaTek LinkIt ONE Developers Guide v1 3Document67 pagesMediaTek LinkIt ONE Developers Guide v1 3Andrés MotoaNo ratings yet
- TechnicalInformationNewProducts PDFDocument32 pagesTechnicalInformationNewProducts PDFsmartel01No ratings yet
- Transistor Circuits Manual No 2 Bernard 163 Clive SinclairDocument25 pagesTransistor Circuits Manual No 2 Bernard 163 Clive Sinclairsantiago962100% (1)
- Am550ck PDFDocument36 pagesAm550ck PDFnes2130No ratings yet
- Testing Procedures For HV Voltage TransformersDocument4 pagesTesting Procedures For HV Voltage Transformersbinode100% (3)
- Energy Band StructureDocument3 pagesEnergy Band StructureChaitu1987No ratings yet
- Panasonic SC-AK310 User Manual (English)Document16 pagesPanasonic SC-AK310 User Manual (English)Сергій ЖабкоNo ratings yet
- An Improved Small-Signal Parameter-Extraction Algorithm For GaN HEMT DevicesDocument11 pagesAn Improved Small-Signal Parameter-Extraction Algorithm For GaN HEMT Devicesali hadi amhazNo ratings yet
- FT003 Manual V2Document1 pageFT003 Manual V2jineeshpaul202125No ratings yet
- Instruction Manual: Manufactured / Marketed byDocument7 pagesInstruction Manual: Manufactured / Marketed byLaxmikant DigraskarNo ratings yet