You might also like
- LCD Work BookDocument102 pagesLCD Work BookNR-SANNo ratings yet
- Power Transformer Erection ManualDocument89 pagesPower Transformer Erection ManualKarthik Sriramakavacham100% (1)
- Work Order FlowDocument3 pagesWork Order FlowKarthik SriramakavachamNo ratings yet
- Vacon NXL ManualDocument62 pagesVacon NXL ManualKarthik SriramakavachamNo ratings yet
- Physics RulesDocument19 pagesPhysics RulesAhmed GhanamNo ratings yet
- 01 Vacon AC Drives Basic CourseDocument43 pages01 Vacon AC Drives Basic CourseKarthik Sriramakavacham100% (2)
- Breaker Thesis PDFDocument121 pagesBreaker Thesis PDFKarthik SriramakavachamNo ratings yet
- DLP WEEK 1 Appied EconomicsDocument4 pagesDLP WEEK 1 Appied Economicsmarco regis100% (1)
- Maintenance Work ManagementDocument56 pagesMaintenance Work ManagementKarthik Sriramakavacham100% (2)
- CIGRE - Paris-Application of Partial Discharge Diagnostic Technique On High Voltage Cable Sealing EndsDocument9 pagesCIGRE - Paris-Application of Partial Discharge Diagnostic Technique On High Voltage Cable Sealing EndsKarthik SriramakavachamNo ratings yet
- Unpriced BOQDocument57 pagesUnpriced BOQCobbinah MarkNo ratings yet
- Design and Operating Parameters of Electro Chlorination PlantDocument5 pagesDesign and Operating Parameters of Electro Chlorination PlantKarthik SriramakavachamNo ratings yet
- PSL File For Bus Coupler ClosingDocument3 pagesPSL File For Bus Coupler ClosingKarthik SriramakavachamNo ratings yet
- The Other Electric Hazard - Electric Arc BurnsDocument6 pagesThe Other Electric Hazard - Electric Arc BurnsKarthik SriramakavachamNo ratings yet
- Altistart-48 Maintanance ManualDocument64 pagesAltistart-48 Maintanance ManualKarthik SriramakavachamNo ratings yet
- Pilot ACR: Technical Data SheetDocument4 pagesPilot ACR: Technical Data SheetBiju_PottayilNo ratings yet
- Chapter 02Document22 pagesChapter 02Andres A. TabuyoNo ratings yet
- Lab2 FDocument4 pagesLab2 FJuan Camilo Guarnizo Bermudez100% (1)
- Experiment 04Document11 pagesExperiment 04Benedict DiwaNo ratings yet
- Resistive CircuitDocument81 pagesResistive Circuitg00089664No ratings yet
- SolutionDocument12 pagesSolutionGame LoverNo ratings yet
- Chapter 3 - Simple Resistive CircuitsDocument2 pagesChapter 3 - Simple Resistive CircuitsI am SmoothieNo ratings yet
- IOQP-2020-21 aKAASH Vns RRR - (Answers & Solutions) - Part-2Document9 pagesIOQP-2020-21 aKAASH Vns RRR - (Answers & Solutions) - Part-2Vikash Kr YadavNo ratings yet
- EE 201 Voltage/current Dividers - 1Document13 pagesEE 201 Voltage/current Dividers - 1bagru baafNo ratings yet
- Ch05 DPDocument2 pagesCh05 DPericleeNo ratings yet
- Exp - No.6 - Transient Response of RLC CircuitsDocument3 pagesExp - No.6 - Transient Response of RLC Circuitsforest lifeNo ratings yet
- Network Theory - Equivalent CircuitsDocument4 pagesNetwork Theory - Equivalent CircuitsHarsh GajjarNo ratings yet
- ECE 550 Lecture Notes 1Document181 pagesECE 550 Lecture Notes 1haroutuonNo ratings yet
- 60286-Chapter 02 PDFDocument50 pages60286-Chapter 02 PDFYvesNo ratings yet
- 2.basic Electrical Engineering Lecture Part 2Document22 pages2.basic Electrical Engineering Lecture Part 2Cedric Zamora100% (1)
- ELEC 210 Exam Sheet PDFDocument7 pagesELEC 210 Exam Sheet PDFshafikatwiNo ratings yet
- LecturesDocument77 pagesLecturesNahid Hasan SumonNo ratings yet
- OpAmp - SOLSDocument7 pagesOpAmp - SOLSMbusí MdlûliNo ratings yet
- Teorema Thevenin: Diketahui: V1 12 Volt V2 11,5 Volt R1 4 R2 21 R3 3Document6 pagesTeorema Thevenin: Diketahui: V1 12 Volt V2 11,5 Volt R1 4 R2 21 R3 3rubi sandyNo ratings yet
- Solution Manual For Electrical Engineering Principlesand Applications 6th Edition by Hambley ISBN 0133413985 9780133413984Document83 pagesSolution Manual For Electrical Engineering Principlesand Applications 6th Edition by Hambley ISBN 0133413985 9780133413984stevenNo ratings yet
- Solution Manual For Electrical Engineering Principlesand Applications 6th Edition by Hambley ISBN 0133413985 9780133413984Document36 pagesSolution Manual For Electrical Engineering Principlesand Applications 6th Edition by Hambley ISBN 0133413985 9780133413984johntorresjmkabgsciz100% (27)
- Indian Olympiad Qualifier in Physics (IOQP) 2020-2021Document10 pagesIndian Olympiad Qualifier in Physics (IOQP) 2020-2021Dhruv KothariNo ratings yet
- EE21L Experiment 4Document11 pagesEE21L Experiment 4asnajhjas asashladaNo ratings yet
- Exam3 Analog SolutionsDocument4 pagesExam3 Analog SolutionsDishawn NationNo ratings yet
- DC3Document9 pagesDC3Dina Rivera RabilasNo ratings yet
- EE201 Ch5 Operational Amplifiers (Part 2) PDFDocument21 pagesEE201 Ch5 Operational Amplifiers (Part 2) PDFThịnh Nguyễn ViếtNo ratings yet
- Linear Transformations: 9.1 The Vector Space RDocument10 pagesLinear Transformations: 9.1 The Vector Space RMaimai Adora SasaNo ratings yet
- Series and Parallel CircuitsDocument10 pagesSeries and Parallel CircuitsJohn Camp hayNo ratings yet
- Op Amp CircuitsDocument2 pagesOp Amp CircuitsDonutdealerdNo ratings yet
- 4 5 6 7 MergedDocument82 pages4 5 6 7 MergedVarshit VegiNo ratings yet
- Lecture 2Document41 pagesLecture 2trongnhansuper1No ratings yet
- EEE 103 LC 3 - Load Flow AnalysisDocument117 pagesEEE 103 LC 3 - Load Flow AnalysisKouji TomasNo ratings yet
- Series and Parallel Circuits: Electric Circuit Analysis (CSE-251)Document12 pagesSeries and Parallel Circuits: Electric Circuit Analysis (CSE-251)abodiNo ratings yet
- Training Part 1Document33 pagesTraining Part 1Amirudin HTMNo ratings yet
- Lecture 2 - MechDocument31 pagesLecture 2 - MechHassan El SayedNo ratings yet
- 04-Lecture 4Document17 pages04-Lecture 4Ahmad Al-ShormanNo ratings yet
- Solutions For Chapter 1: Exercise 1.1Document12 pagesSolutions For Chapter 1: Exercise 1.1William LeiteNo ratings yet
- Topic2 - Resistive Circuits - Part 2Document26 pagesTopic2 - Resistive Circuits - Part 2jeanniejayeadsNo ratings yet
- Basic Laws - Voltage and Current DivisionDocument12 pagesBasic Laws - Voltage and Current DivisionSTACEYLEEN CYENTHIA LADIUN BK22110177No ratings yet
- CH 4Document8 pagesCH 4Gautam TamangNo ratings yet
- G. Tuttle - 2022 Voltage/current Dividers - 1Document13 pagesG. Tuttle - 2022 Voltage/current Dividers - 1SkyNo ratings yet
- Physics RulesDocument17 pagesPhysics Rulesahussein910No ratings yet
- ECE 240 - Radmanesh Lec 1Document7 pagesECE 240 - Radmanesh Lec 1zaneNo ratings yet
- Muhammad Hassan Saeed - 284223-SYN a-LAB 9Document10 pagesMuhammad Hassan Saeed - 284223-SYN a-LAB 9Hassan SaeedNo ratings yet
- 13 - L-12 (DK) (Pe) ( (Ee) Nptel)Document1 page13 - L-12 (DK) (Pe) ( (Ee) Nptel)CharkNo ratings yet
- Elec1111 02b Series Parallel PDocument4 pagesElec1111 02b Series Parallel PuploadingpersonNo ratings yet
- Lesson 5AC The Big 3Document23 pagesLesson 5AC The Big 3Kristine joy MalvasNo ratings yet
- Ci Ia Li1 Circuit Analysis 1: Nodal and Loop Analysis TechniquesDocument12 pagesCi Ia Li1 Circuit Analysis 1: Nodal and Loop Analysis TechniquessalmanshahidkhanNo ratings yet
- Week 1 2021 Lecture Note - OpamplifierDocument20 pagesWeek 1 2021 Lecture Note - OpamplifierBenjamin HungNo ratings yet
- Unit 2 CDocument58 pagesUnit 2 CShaleva SinghNo ratings yet
- Analisis Efek PembebananDocument4 pagesAnalisis Efek PembebananRirin NoviantyNo ratings yet
- Current Electricity - Answer KeyDocument8 pagesCurrent Electricity - Answer KeyADITYA SINGHNo ratings yet
- UntitledDocument1 pageUntitledHelder CruzNo ratings yet
- Non - Ideal - Op - Amps Notes 1Document6 pagesNon - Ideal - Op - Amps Notes 1RenkenNo ratings yet
- Notes OpampDocument26 pagesNotes OpampmamadhubalaNo ratings yet
- Rotation_MatrixDocument6 pagesRotation_MatrixbenyfirstNo ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Maintenance of Good Brush PerformanceDocument6 pagesMaintenance of Good Brush PerformanceKarthik SriramakavachamNo ratings yet
- Hyundai Medium Voltage VSD N500 Series Instruction ManualDocument91 pagesHyundai Medium Voltage VSD N500 Series Instruction ManualKarthik SriramakavachamNo ratings yet
- Vibration Measurement Techniques PDFDocument11 pagesVibration Measurement Techniques PDFKarthik Sriramakavacham100% (1)
- Outline Drawing HECS-100LDocument1 pageOutline Drawing HECS-100LKarthik SriramakavachamNo ratings yet
- Protective Clothing Guidelines For Electric Arc ExposureDocument18 pagesProtective Clothing Guidelines For Electric Arc ExposureKarthik SriramakavachamNo ratings yet
- The Importance of Electrical Safety Training in Undergraduate Power Engineering EducationDocument12 pagesThe Importance of Electrical Safety Training in Undergraduate Power Engineering EducationKarthik SriramakavachamNo ratings yet
- PTW Process Catalogues SAPDocument7 pagesPTW Process Catalogues SAPKarthik SriramakavachamNo ratings yet
- Sugar Mill Reactive Power ManagementDocument3 pagesSugar Mill Reactive Power ManagementKarthik SriramakavachamNo ratings yet
- Oip VS Rip-2 PDFDocument11 pagesOip VS Rip-2 PDFKarthik SriramakavachamNo ratings yet
- Voltage DetectorsDocument4 pagesVoltage DetectorsKarthik SriramakavachamNo ratings yet
- CASR 183 Rev 1Document10 pagesCASR 183 Rev 1FirmansyahFandi0% (1)
- Mastering VB6 DatabaseDocument69 pagesMastering VB6 DatabaseSajjad AbdullahNo ratings yet
- Avaya P333R-LB 3.12 UGDocument434 pagesAvaya P333R-LB 3.12 UGbratiloveanuNo ratings yet
- Mono APA English 4Document66 pagesMono APA English 4Jose Tochi EspinozaNo ratings yet
- Constituent Materials of Concrete: by Nick Gromicko, CMI® and Kenton ShepardDocument9 pagesConstituent Materials of Concrete: by Nick Gromicko, CMI® and Kenton ShepardWalterNo ratings yet
- Manual For CPS Pump 1Document64 pagesManual For CPS Pump 1edison.mmendozaNo ratings yet
- Name: - Dhruvil Chandulal Jakasaniya: ObjectiveDocument2 pagesName: - Dhruvil Chandulal Jakasaniya: ObjectivedhruvilNo ratings yet
- Baumueller DS2 100 200 - 2022 - enDocument88 pagesBaumueller DS2 100 200 - 2022 - enDikr ElhakimNo ratings yet
- TRACTOR AERO Parts Service Manual - Tt10-12 - Isuzu Diesel 4jg1tDocument83 pagesTRACTOR AERO Parts Service Manual - Tt10-12 - Isuzu Diesel 4jg1tAnonymous F7swrENo ratings yet
- 2.5 SQ - MM Pluggable Feed Through Spring Clamp Terminal BlockDocument2 pages2.5 SQ - MM Pluggable Feed Through Spring Clamp Terminal BlockNitinNo ratings yet
- Booster Basics PresentationDocument49 pagesBooster Basics PresentationbinhjukiNo ratings yet
- Chapter 4: Data Analysis and FindingsDocument21 pagesChapter 4: Data Analysis and FindingsRasool SeelabNo ratings yet
- National Students' Space Challenge 2014: Registration Id: NSSC141523 Participant Id: - Registration FormDocument2 pagesNational Students' Space Challenge 2014: Registration Id: NSSC141523 Participant Id: - Registration FormAstitvaTyagiNo ratings yet
- Smart Aug 2018Document6 pagesSmart Aug 2018Ash MangueraNo ratings yet
- (49-58) An Experimental Investigation On Interference of Piled Rafts in Soft SoilDocument11 pages(49-58) An Experimental Investigation On Interference of Piled Rafts in Soft SoilAlexander DeckerNo ratings yet
- Pipeworks EngDocument61 pagesPipeworks EngRuben Samoel Barros RochaNo ratings yet
- Fianll 2Document79 pagesFianll 2Arjun SanalNo ratings yet
- chiếc giày phủiDocument7 pageschiếc giày phủiNhân NgọcNo ratings yet
- Designing An Intelligent Voltage Instability System in Power Distribution System in The Philippines Using IEEE 14-Bus Test SystemDocument7 pagesDesigning An Intelligent Voltage Instability System in Power Distribution System in The Philippines Using IEEE 14-Bus Test SystemPocholo RodriguezNo ratings yet
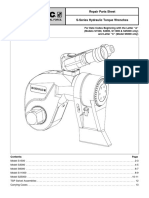
- Repair Parts Sheet S-Series Hydraulic Torque WrenchesDocument14 pagesRepair Parts Sheet S-Series Hydraulic Torque WrenchesRogers AristizabalNo ratings yet
- Cons FormDocument3 pagesCons FormLaw FetNo ratings yet
- Employer Branding: A Case For Robi Axiata LimitedDocument108 pagesEmployer Branding: A Case For Robi Axiata LimitedJeremiah Knight100% (1)
- Safety4sea ComDocument1 pageSafety4sea Comasy marketingNo ratings yet
- 4590 Casagrande Standpipe Piezometer PDFDocument2 pages4590 Casagrande Standpipe Piezometer PDFdanielquispearonesNo ratings yet
- Kiruna Poster 1Document1 pageKiruna Poster 1rishanNo ratings yet
- CFR 2021 Title29 Vol5 Sec1910 29Document8 pagesCFR 2021 Title29 Vol5 Sec1910 29Thupten Gedun Kelvin OngNo ratings yet