You might also like
- Ontario Surgical and Diagnostic RecoveryDocument10 pagesOntario Surgical and Diagnostic RecoveryIsaac Callan, Global NewsNo ratings yet
- Wave Mall, NoidaDocument35 pagesWave Mall, NoidaKaushiki Kamboj100% (9)
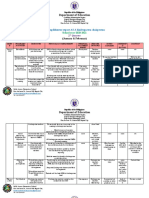
- Accomplishment Report Kinder 2020 2021 2ND QDocument4 pagesAccomplishment Report Kinder 2020 2021 2ND QRhell FhebNo ratings yet
- Demand Letter Sample For UAEDocument1 pageDemand Letter Sample For UAEDinkar Joshi0% (1)
- Network Chapter# 20: Transport Protocols Transport Protocols Transport Protocols Transport ProtocolsDocument6 pagesNetwork Chapter# 20: Transport Protocols Transport Protocols Transport Protocols Transport ProtocolsRevathi RevaNo ratings yet
- Insurance Blokers - IndiaDocument47 pagesInsurance Blokers - Indiakingsing44No ratings yet
- Use and Maintenance ManualDocument29 pagesUse and Maintenance Manualguilherme0% (1)
- Your Thursday Ride From Kodigehalli To Santhi Nagar Bus Stand BangaloreDocument2 pagesYour Thursday Ride From Kodigehalli To Santhi Nagar Bus Stand Bangaloreanand0% (1)
- C C++ Interview Questions AnswersDocument14 pagesC C++ Interview Questions Answersactiveguy_smalNo ratings yet
- La Statement of PurposeDocument1 pageLa Statement of PurposeChocolaty Munda0% (2)
- SensorsDocument30 pagesSensorsJuan sebastian lopez escobarNo ratings yet
- Medical Engineering & Physics: Jie LiuDocument5 pagesMedical Engineering & Physics: Jie LiuD4wFl1NNo ratings yet
- Identification of Hand Movements From ElDocument12 pagesIdentification of Hand Movements From ElAlyaa GhaziNo ratings yet
- Comparative Analysis of Machine Learning Algorithms On Myoelectric Signal From Intact and Transradial Amputated LimbsDocument9 pagesComparative Analysis of Machine Learning Algorithms On Myoelectric Signal From Intact and Transradial Amputated LimbsIAES IJAINo ratings yet
- Design and Testing of A Textile EMG Sensor For Prosthetic ControlDocument16 pagesDesign and Testing of A Textile EMG Sensor For Prosthetic ControlMuhammad ZawarNo ratings yet
- Analysis of Myoelectric Signals To Prosthesis ApplicationsDocument8 pagesAnalysis of Myoelectric Signals To Prosthesis ApplicationsBrunaNo ratings yet
- Robot Arm Control Method Using Forearm EMG SignalsDocument11 pagesRobot Arm Control Method Using Forearm EMG SignalsQuan Phương LêNo ratings yet
- 191 ModifiedDocument4 pages191 Modifiedqudrat zohirovNo ratings yet
- Expert Systems With Applications: Rami N. Khushaba, Sarath Kodagoda, Maen Takruri, Gamini DissanayakeDocument8 pagesExpert Systems With Applications: Rami N. Khushaba, Sarath Kodagoda, Maen Takruri, Gamini DissanayakeRohtash DhimanNo ratings yet
- Using Textile Electrode EMG For Prosthetic Movement Identification in Transradial AmputeesDocument6 pagesUsing Textile Electrode EMG For Prosthetic Movement Identification in Transradial AmputeesGOKUL THANGAVELNo ratings yet
- Grasp Recognition From Myoelectric Signals: Simon Ferguson G Reg DunlopDocument5 pagesGrasp Recognition From Myoelectric Signals: Simon Ferguson G Reg Dunlopwmp8611024213No ratings yet
- Acquisition and Analysis of EMG Signals To Recognize Multiple Hand Movements For Prosthetic ApplicationsDocument12 pagesAcquisition and Analysis of EMG Signals To Recognize Multiple Hand Movements For Prosthetic ApplicationsEdgarGonzálezNo ratings yet
- Validation of A Low-Cost Electromyography (EMG) System Via A Commercial and Accurate EMG Device - Pilot StudyDocument16 pagesValidation of A Low-Cost Electromyography (EMG) System Via A Commercial and Accurate EMG Device - Pilot StudyNazhan HakeemNo ratings yet
- - Статья - Электромиография (ЭМГ) на АрдуиноDocument16 pages- Статья - Электромиография (ЭМГ) на Ардуиноsoros4No ratings yet
- EMG Signal Features Extraction of Different Arm Movement For Rehabilitation Device PDFDocument12 pagesEMG Signal Features Extraction of Different Arm Movement For Rehabilitation Device PDFulfahrifNo ratings yet
- Wearable Sensors For Gait AnalysisDocument5 pagesWearable Sensors For Gait AnalysissanahujalidiaNo ratings yet
- A Multi-Channel Electromyography ElectrocardiograpDocument27 pagesA Multi-Channel Electromyography ElectrocardiograpVizaNo ratings yet
- A Multi-Channel Electromyography, Electrocardiography and Inertial Wireless Sensor Module Using Bluetooth Low-EnergyDocument27 pagesA Multi-Channel Electromyography, Electrocardiography and Inertial Wireless Sensor Module Using Bluetooth Low-EnergyAbhishekNo ratings yet
- Sensors: Machine-Learning-Based Muscle Control of A 3D-Printed Bionic ArmDocument16 pagesSensors: Machine-Learning-Based Muscle Control of A 3D-Printed Bionic ArmDhinu LalNo ratings yet
- EMG Pattern Recognition in The Era of Big Data and Deep LearningDocument27 pagesEMG Pattern Recognition in The Era of Big Data and Deep LearningMahnoor ArshadNo ratings yet
- Robot Hand Movement Electromyography SignalDocument23 pagesRobot Hand Movement Electromyography SignalWilliam VenegasNo ratings yet
- Sensors: A Low-Cost, Wireless, 3-D-Printed Custom Armband For sEMG Hand Gesture RecognitionDocument24 pagesSensors: A Low-Cost, Wireless, 3-D-Printed Custom Armband For sEMG Hand Gesture RecognitiontoukoNo ratings yet
- Muscle Fatigue Detection Through Wearable Sensors. A Comparative Study Using The Myo ArmbandDocument2 pagesMuscle Fatigue Detection Through Wearable Sensors. A Comparative Study Using The Myo ArmbandimranNo ratings yet
- Techniques of EMG Signal Analysis: Detection, Processing, Classification and ApplicationsDocument26 pagesTechniques of EMG Signal Analysis: Detection, Processing, Classification and ApplicationsEE18B033 SOURABH KUMARNo ratings yet
- Prosthetic Hand Using EMG SignalDocument4 pagesProsthetic Hand Using EMG SignalInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- DWang YuchenDocument9 pagesDWang Yuchensafa ameurNo ratings yet
- Hardware Implementation For Lower Limb Surface EMG Measurement and Analysis Using Explainable AI For Activity RecognitionDocument9 pagesHardware Implementation For Lower Limb Surface EMG Measurement and Analysis Using Explainable AI For Activity Recognitionbhavesh agrawalNo ratings yet
- Electromyography (EMG) Signal Acquisition and Processing by Using Surface ElectrodesDocument40 pagesElectromyography (EMG) Signal Acquisition and Processing by Using Surface ElectrodesHector Jahir Silva RuizNo ratings yet
- Portable EMG Data Acquisition Module For Upper Limb Prosthesis ApplicationDocument8 pagesPortable EMG Data Acquisition Module For Upper Limb Prosthesis ApplicationHoàng ThắngNo ratings yet
- Biosensors 11 00411 v2Document15 pagesBiosensors 11 00411 v2tanvir anwarNo ratings yet
- Analise EmgDocument36 pagesAnalise EmgBruno SantosNo ratings yet
- Electronics: Analysis and Recognition of Human Lower Limb Motions Based On Electromyography (EMG) SignalsDocument21 pagesElectronics: Analysis and Recognition of Human Lower Limb Motions Based On Electromyography (EMG) SignalsAhmad M. DagamsehNo ratings yet
- Sensors: Lower Limb Wearable Capacitive Sensing and Its Applications To Recognizing Human GaitsDocument22 pagesSensors: Lower Limb Wearable Capacitive Sensing and Its Applications To Recognizing Human Gaitsmarius_haganNo ratings yet
- Morais 2021 J. Phys. Conf. Ser. 1826 012084Document8 pagesMorais 2021 J. Phys. Conf. Ser. 1826 012084Johnny Joe AguilarNo ratings yet
- A Wearable Force Myography-Based Armband For Recognition of Upper Limb GesturesDocument18 pagesA Wearable Force Myography-Based Armband For Recognition of Upper Limb Gestureskarohal22No ratings yet
- Signal Condition and Acquisition System For A Low Cost EMG Based Prosthetic HandDocument9 pagesSignal Condition and Acquisition System For A Low Cost EMG Based Prosthetic HandNazhan HakeemNo ratings yet
- Evaluation of Data Compression Methods For Efficient Transport and Classification of Facial Emg SignalsDocument21 pagesEvaluation of Data Compression Methods For Efficient Transport and Classification of Facial Emg Signalsbizhan abgarmiNo ratings yet
- Classification of Gait Phases From Lower Limb EMG: Application To Exoskeleton OrthosisDocument4 pagesClassification of Gait Phases From Lower Limb EMG: Application To Exoskeleton OrthosisshravantataNo ratings yet
- 2020 Paper 7Document19 pages2020 Paper 7Vikas KaushikNo ratings yet
- Virtual Artificial Sensor Technique For Functional Electrical StimulationDocument11 pagesVirtual Artificial Sensor Technique For Functional Electrical StimulationCarlos Alexandre FerriNo ratings yet
- Man Herle Lazea DAAAMDocument2 pagesMan Herle Lazea DAAAMSergiu ManNo ratings yet
- Short-Term Hand Gestures Recognition Based On Electromyography SignalsDocument9 pagesShort-Term Hand Gestures Recognition Based On Electromyography SignalsIAES IJAINo ratings yet
- Psoc-Based Embedded System For The Acquisition of Emg Signals With Android Mobile Device DisplayDocument6 pagesPsoc-Based Embedded System For The Acquisition of Emg Signals With Android Mobile Device DisplayAlex BogmaNo ratings yet
- Content: 2. Literature Survey 3. Problem Definition 4. Objective 5. Methodology 6. ReferencesDocument10 pagesContent: 2. Literature Survey 3. Problem Definition 4. Objective 5. Methodology 6. ReferencesImran ShaikhNo ratings yet
- 1 - 1 - A Article A Systematic StudyDocument13 pages1 - 1 - A Article A Systematic StudyJavier Canto ÁngelesNo ratings yet
- 2019 Paper 2Document8 pages2019 Paper 2Vikas KaushikNo ratings yet
- SEMG Signal Classification Using Novel FeaturesDocument11 pagesSEMG Signal Classification Using Novel FeaturesVikas KaushikNo ratings yet
- EMG Based Hand Gesture Classification UsingDocument4 pagesEMG Based Hand Gesture Classification UsingChristian F. VegaNo ratings yet
- A Guide For Use and Interpretation of Kinesiologic Electromyographic Data PDFDocument13 pagesA Guide For Use and Interpretation of Kinesiologic Electromyographic Data PDFIgor Eduardo S. SouzaNo ratings yet
- Design and Implementation of Hand Movement Detection and Classification Method Using Electromyogram Signal For Human-Computer InterfaceDocument6 pagesDesign and Implementation of Hand Movement Detection and Classification Method Using Electromyogram Signal For Human-Computer InterfaceInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Biosensors 12 00516 v2Document37 pagesBiosensors 12 00516 v2chaoyiyanchoyNo ratings yet
- Fpga PDFDocument16 pagesFpga PDFlmaraujo67No ratings yet
- Published Ijisae 11 Tengku Nor Shuhada 6 1426Document9 pagesPublished Ijisae 11 Tengku Nor Shuhada 6 1426Tengku Nor Shuhada Tengku ZawawiNo ratings yet
- EMG SignalDocument9 pagesEMG Signalbvkarthik2711No ratings yet
- Sensors 17 01937Document27 pagesSensors 17 01937Raynald SumampouwNo ratings yet
- Elbow Flexion and Extension Identification Using Surface Electromyography SignalsDocument5 pagesElbow Flexion and Extension Identification Using Surface Electromyography SignalsAlexandra Torres GacharnaNo ratings yet
- SleepDocument15 pagesSleepgauravchauNo ratings yet
- Sensors: Relieff-Based Eeg Sensor Selection Methods For Emotion RecognitionDocument15 pagesSensors: Relieff-Based Eeg Sensor Selection Methods For Emotion RecognitionNADIA TASNIM MIMNo ratings yet
- An Integrated Fall Prevention System With Single-Channel EEG and EMG SensorDocument7 pagesAn Integrated Fall Prevention System With Single-Channel EEG and EMG SensorNG Jun HowNo ratings yet
- Brain Computer Interface Decoding Performance using EEG Error Related PotentialsFrom EverandBrain Computer Interface Decoding Performance using EEG Error Related PotentialsNo ratings yet
- Enzo ContentDocument4 pagesEnzo ContentLarry Fritz SignabonNo ratings yet
- How Do I Enable or Disable HDMI Audio in Windows If I Am Using An HDMI Connection Between My Nvidia Video Card or Motherboard and My Monitor?Document3 pagesHow Do I Enable or Disable HDMI Audio in Windows If I Am Using An HDMI Connection Between My Nvidia Video Card or Motherboard and My Monitor?JavadNo ratings yet
- Operation Status Node NameDocument54 pagesOperation Status Node NameSpartacus CaesarNo ratings yet
- Directorate of Forest Based IndustryDocument6 pagesDirectorate of Forest Based IndustryamitozaNo ratings yet
- Oxygen MSDSDocument4 pagesOxygen MSDSsalcabesNo ratings yet
- Treat & Reduce Obesity ActDocument1 pageTreat & Reduce Obesity ActAubrey StuecklerNo ratings yet
- Absolving The State The TraffDocument12 pagesAbsolving The State The TraffLorenzo RomaNo ratings yet
- Case Studies-On S 270 A - MR Jagdish Punjabi PDFDocument28 pagesCase Studies-On S 270 A - MR Jagdish Punjabi PDFIshanNo ratings yet
- ZAVKOM - IPA From AcetoneDocument32 pagesZAVKOM - IPA From Acetonephaniraj_cNo ratings yet
- MIP705Document2 pagesMIP705edufigue21No ratings yet
- IPPTA 144-67-68 Paper Mills in VapiDocument2 pagesIPPTA 144-67-68 Paper Mills in VapiajantaiNo ratings yet
- Agan Jr. vs. PIATCO Case DigestDocument1 pageAgan Jr. vs. PIATCO Case DigestPrincess Ruksan Lawi SucorNo ratings yet
- Heart Rules of Sales TaxDocument4 pagesHeart Rules of Sales Taxbroken GMDNo ratings yet
- 38-80 GHZ SPDT Traveling Wave Switch Mmic Utilizing Fully Distributed FetDocument4 pages38-80 GHZ SPDT Traveling Wave Switch Mmic Utilizing Fully Distributed FetBisuNo ratings yet
- Starbucks Assignment 2Document4 pagesStarbucks Assignment 2srmajistoreNo ratings yet
- Hyperion System 9 Financial Management Subcube Architecture 0406Document12 pagesHyperion System 9 Financial Management Subcube Architecture 0406ligiamolguin9426No ratings yet
- Cyralie B. Maglipac M2 AnswerDocument1 pageCyralie B. Maglipac M2 AnswerMatet MaglipacNo ratings yet
- Fast TrackDocument46 pagesFast Tracknarvabus1No ratings yet
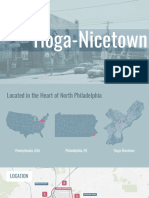
- Tioga NicetownDocument93 pagesTioga NicetownbaumawbNo ratings yet
- Wet Granulation End-Point DeterminationDocument18 pagesWet Granulation End-Point DeterminationPreeti Wavikar-PanhaleNo ratings yet