You might also like
- ME2142E Feedback and Control Lab - Speed Position Control of A DC MotorDocument12 pagesME2142E Feedback and Control Lab - Speed Position Control of A DC MotorLinShaodun100% (13)
- Input/output Pole-Placement State-Space Design - Output FeedbackDocument9 pagesInput/output Pole-Placement State-Space Design - Output FeedbackCarlos EduardoNo ratings yet
- Self Balancing ScooterDocument15 pagesSelf Balancing ScooterAfortunatovNo ratings yet
- BCS - 4 - Reduction of Multiple SubsystemsDocument24 pagesBCS - 4 - Reduction of Multiple Subsystemsandik yuliantoNo ratings yet
- DSK - 4 - Reduction of Multiple SubsystemsDocument24 pagesDSK - 4 - Reduction of Multiple Subsystemsandik yuliantoNo ratings yet
- Chapter 3Document37 pagesChapter 3Izzat AiresNo ratings yet
- EE5103/ME5403 Lecture Six Predictive Control: Solution To Tracking ProblemDocument44 pagesEE5103/ME5403 Lecture Six Predictive Control: Solution To Tracking ProblemFeiNo ratings yet
- T FN, Pole-Zeros, Block Diagram & SFGDocument28 pagesT FN, Pole-Zeros, Block Diagram & SFGArsal AslamNo ratings yet
- Block Diagram SimplificationDocument22 pagesBlock Diagram SimplificationAhmed SaidNo ratings yet
- Lecture 7 & 8 (Stability Analysis)Document35 pagesLecture 7 & 8 (Stability Analysis)muhammad hamzaNo ratings yet
- Mason's RuleDocument4 pagesMason's RuleMarvin GarcíaNo ratings yet
- A Tutorial For Electronic Circuit ...Document5 pagesA Tutorial For Electronic Circuit ...Chito June TumolvaNo ratings yet
- Chapter 2 - Reduction of Multiple SystemDocument46 pagesChapter 2 - Reduction of Multiple SystemHaqeemee HusseinNo ratings yet
- Block Diagrams EnotesDocument7 pagesBlock Diagrams Enotespatel_vicky87No ratings yet
- Stability Analysis For Control SystemsDocument36 pagesStability Analysis For Control SystemsSARTHAK BAPATNo ratings yet
- MCS Final Fall 23 24 Section ADocument2 pagesMCS Final Fall 23 24 Section Asafwan.ahmed.eduNo ratings yet
- Blok DiagramDocument43 pagesBlok DiagramBagoessngenger DwiNo ratings yet
- CE - Lec 3Document34 pagesCE - Lec 3Sumran ShahidNo ratings yet
- Geometrical Analysis of The Worm-Spiral Wheel FronDocument6 pagesGeometrical Analysis of The Worm-Spiral Wheel FrondawitNo ratings yet
- FreDocument2 pagesFrearrepio cosmicoNo ratings yet
- Section - A: Multiple Choice Questions (MCQ)Document18 pagesSection - A: Multiple Choice Questions (MCQ)JYOTISMAT RAULNo ratings yet
- ControlDocument29 pagesControlabrhamNo ratings yet
- Ders11 IngDocument16 pagesDers11 IngjgenNo ratings yet
- First Day Notes (Two Subjects Notes)Document9 pagesFirst Day Notes (Two Subjects Notes)Ebad AhmedNo ratings yet
- Mathematics Extension 2: 9th OctoberDocument14 pagesMathematics Extension 2: 9th OctoberAndrew TaNo ratings yet
- Notes 4Document13 pagesNotes 4lili aboudNo ratings yet
- Lectures On Applications: Analog Circuit DesignDocument41 pagesLectures On Applications: Analog Circuit Designnnmate929No ratings yet
- L3 BlockDiagramDocument18 pagesL3 BlockDiagramRaj PatelNo ratings yet
- KOM 3781 Discrete-Time Control Systems: Veysel GaziDocument72 pagesKOM 3781 Discrete-Time Control Systems: Veysel GaziFatih CanbolatNo ratings yet
- BoS Ext 2 Mock ExamDocument14 pagesBoS Ext 2 Mock Examwethmi rupasingheNo ratings yet
- Control Engineering MT-353: Block Diagram ReductionDocument38 pagesControl Engineering MT-353: Block Diagram ReductionTahaKhanNo ratings yet
- Unit1 Block DiagramDocument75 pagesUnit1 Block DiagramPrasidha PrabhuNo ratings yet
- L5 LTXTFBWDocument34 pagesL5 LTXTFBWamnah abayedNo ratings yet
- Control SystemsDocument25 pagesControl Systemskakaka12No ratings yet
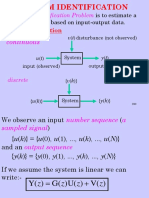
- Continuous: System Identification ProblemDocument41 pagesContinuous: System Identification Problemboulainine houriaNo ratings yet
- Continuous: System Identification ProblemDocument41 pagesContinuous: System Identification Problemboulainine houriaNo ratings yet
- Fem - Module - IIIDocument34 pagesFem - Module - IIIrvit21bme023.rvitmNo ratings yet
- Instrument TransformerDocument14 pagesInstrument TransformerJashan BansalNo ratings yet
- Frequency Response Analysis: Section 6Document45 pagesFrequency Response Analysis: Section 6Ahmed HassanNo ratings yet
- IIT JAM Physics 2016 PaperDocument18 pagesIIT JAM Physics 2016 Papertestseries.quantaNo ratings yet
- Teoría de Control: Hector Villacorta Hector - Villacorta@upa - Edu.mxDocument14 pagesTeoría de Control: Hector Villacorta Hector - Villacorta@upa - Edu.mxdaniela martinezNo ratings yet
- Microsoft Word - Block Diagram AlgebraDocument15 pagesMicrosoft Word - Block Diagram AlgebraShubhobrata RudraNo ratings yet
- EECS3611 Chapter5 UpdatedDocument24 pagesEECS3611 Chapter5 Updatednickbekiaris05No ratings yet
- Block Diagram Representation: Peter Avitabile Mechanical Engineering Department University of Massachusetts LowellDocument19 pagesBlock Diagram Representation: Peter Avitabile Mechanical Engineering Department University of Massachusetts LowellAnn RazonNo ratings yet
- Lecture 4 (Compatibility Mode)Document26 pagesLecture 4 (Compatibility Mode)Anonymous dGnj3bZNo ratings yet
- 4-Modeling in The Frequency Domain PDFDocument28 pages4-Modeling in The Frequency Domain PDFMüge ERDOĞANNo ratings yet
- 2020 10 Chapter 8 - Root LocusDocument34 pages2020 10 Chapter 8 - Root LocusMartin LuhutNo ratings yet
- Practical Statistical Network Analysis (With and Igraph) : G A Bor Cs A RdiDocument63 pagesPractical Statistical Network Analysis (With and Igraph) : G A Bor Cs A RdipeterNo ratings yet
- Regression AnalysisDocument47 pagesRegression AnalysisRuchika MotwaniNo ratings yet
- QuizDocument9 pagesQuizJohnNo ratings yet
- Unit 7: Control SystemsDocument30 pagesUnit 7: Control SystemsOverloaded SenseNo ratings yet
- B3 IirDocument39 pagesB3 Iirmaria reverteNo ratings yet
- Pre-Calculus Conic Section Q1 - Week 4: HyperbolaDocument23 pagesPre-Calculus Conic Section Q1 - Week 4: HyperbolaNelsonNelsonNo ratings yet
- Week 5 6 Control Systems Signal Flow GraphsDocument39 pagesWeek 5 6 Control Systems Signal Flow GraphsMuhammad AhmadNo ratings yet
- Gold Report 12 Sep 2010Document16 pagesGold Report 12 Sep 2010AndysTechnicalsNo ratings yet
- Lec 04, EPM 252, Automatic Control SystemDocument43 pagesLec 04, EPM 252, Automatic Control SystemAhmed EssamNo ratings yet
- Log-Log PlotsDocument22 pagesLog-Log PlotsFedericoNo ratings yet
- EC Control-SystemDocument58 pagesEC Control-SystemAvinash KumarNo ratings yet
- Lab 2 - Root Locus Analysis (202312)Document2 pagesLab 2 - Root Locus Analysis (202312)Azlina RamliNo ratings yet
- Control Systems (CS)Document30 pagesControl Systems (CS)Shwetank AryanNo ratings yet
- Productivity Now: Social Administration, Training, Economics and Production DivisionFrom EverandProductivity Now: Social Administration, Training, Economics and Production DivisionNo ratings yet
- Chemical Reactor Temperature ControlDocument5 pagesChemical Reactor Temperature ControlSANJAY100% (1)
- Antenna Azimuth Position Control With Classical PID and Fuzzy Logic ControllersDocument5 pagesAntenna Azimuth Position Control With Classical PID and Fuzzy Logic Controllersziafat shehzadNo ratings yet
- Motion Control HandbookDocument38 pagesMotion Control Handbookvincentttt100% (1)
- Hydraulic Control SystemDocument16 pagesHydraulic Control SystemHeerok Kumar100% (1)
- Xinhua Digital Electro-Hydraulic Control System DEH-V For Steam TurbinesDocument36 pagesXinhua Digital Electro-Hydraulic Control System DEH-V For Steam TurbineselrajilNo ratings yet
- Beck CatalogDocument88 pagesBeck CatalogJavier GutierrezNo ratings yet
- GOVSYSDocument13 pagesGOVSYSSam100% (1)
- Figure 1.1 Process To Be Controlled.: All Rights Reserved. Richard C. Dorf and Robert H. BishopDocument58 pagesFigure 1.1 Process To Be Controlled.: All Rights Reserved. Richard C. Dorf and Robert H. BishopSumathi AnandNo ratings yet
- Automatic Coin Sorter and Counter Using The Combination of Labview and MatlabDocument4 pagesAutomatic Coin Sorter and Counter Using The Combination of Labview and MatlabDarshan SubramanyaNo ratings yet
- Low Res Outotec Thickening 18022011Document12 pagesLow Res Outotec Thickening 18022011Juan Alberto Giglio FernándezNo ratings yet
- MT 3000-2i Offset: Special ClassDocument19 pagesMT 3000-2i Offset: Special ClassConsorcio El dorado 2019No ratings yet
- 271 Introduction To Process Control Course DescriptionDocument2 pages271 Introduction To Process Control Course DescriptionAdrian Reyes100% (1)
- 9107-d227 - Control System EngineeringDocument7 pages9107-d227 - Control System Engineeringe--cityandguildsNo ratings yet
- Time Response PDFDocument15 pagesTime Response PDFlunática por lutteo soy luna foreverNo ratings yet
- Latest PG-Process Control 2008-09Document32 pagesLatest PG-Process Control 2008-09MAX PAYNENo ratings yet
- Review of Literature On Steam AccumulatorDocument10 pagesReview of Literature On Steam Accumulatortamil vaananNo ratings yet
- Frasch eDocument4 pagesFrasch eRaul RiveraNo ratings yet
- Hydro Governor OverviewDocument3 pagesHydro Governor Overviewdrmsrmurty9473No ratings yet
- SL0005 Hydronix RangeDocument6 pagesSL0005 Hydronix RangeP.S.J.SarmaNo ratings yet
- Inst. Symbols, P&ID & FunctionDocument30 pagesInst. Symbols, P&ID & FunctionRaja Prathap SinghNo ratings yet
- Inferential ControlDocument25 pagesInferential ControlMelissa Yeo MixiaNo ratings yet
- Marlin Ch07Document28 pagesMarlin Ch07Preciously OmnesNo ratings yet
- Guidelines For Common Control LoopsDocument2 pagesGuidelines For Common Control LoopsKhairul AnwarNo ratings yet
- Tech 149 Unit 1 NewDocument104 pagesTech 149 Unit 1 NewsandeepNo ratings yet
- Technical Interview Questions For Instrumentation EngineeringDocument48 pagesTechnical Interview Questions For Instrumentation EngineeringtejasNo ratings yet
- Coursework Title: Control System Design and Simulation For A Chemical ProcessDocument6 pagesCoursework Title: Control System Design and Simulation For A Chemical ProcessJianguo WangNo ratings yet
- 1 Control - Systems - NotesDocument19 pages1 Control - Systems - NotesTaku Teekay MatangiraNo ratings yet
- Process Control SystemDocument18 pagesProcess Control SystemPalani ArunachalamNo ratings yet