You might also like
- Topic Finite Dimencional AlgebrasDocument96 pagesTopic Finite Dimencional AlgebrasJunior FariaNo ratings yet
- Lectures On Supersymmetry: 1. Super Liner Algebra. 1.1Document16 pagesLectures On Supersymmetry: 1. Super Liner Algebra. 1.1luisdanielNo ratings yet
- Rubric for End-Semester Exam GuideDocument20 pagesRubric for End-Semester Exam GuideAkarsh GuptaNo ratings yet
- 408 NoteDocument57 pages408 Notevaibhavsingh4594No ratings yet
- Advanced algorithms explainedDocument188 pagesAdvanced algorithms explainedyohanes sinagaNo ratings yet
- Notes AnalysisDocument14 pagesNotes Analysislucabaldassarre368No ratings yet
- Graph Eigenvalues Explained: Largest, Smallest, Gap and MoreDocument29 pagesGraph Eigenvalues Explained: Largest, Smallest, Gap and MoreDenise ParksNo ratings yet
- quadratic_TNRDocument30 pagesquadratic_TNRcarriegosNo ratings yet
- Chapter 21Document6 pagesChapter 21manikannanp_ponNo ratings yet
- Math Matrix 1 NoteDocument5 pagesMath Matrix 1 Noteankita patelNo ratings yet
- Mathematical Treatise On Linear AlgebraDocument7 pagesMathematical Treatise On Linear AlgebraJonathan MahNo ratings yet
- MATH 304 Linear Algebra Eigenvalues and Eigenvectors. Characteristic EquationDocument13 pagesMATH 304 Linear Algebra Eigenvalues and Eigenvectors. Characteristic Equationezat algarroNo ratings yet
- SVD Properties Guide: Key Insights on the Singular Value DecompositionDocument24 pagesSVD Properties Guide: Key Insights on the Singular Value Decompositionnorwenda triNo ratings yet
- Homework #7, Sec 12.2Document6 pagesHomework #7, Sec 12.2Masaya SatoNo ratings yet
- Curve TracingDocument4 pagesCurve Tracingsurekha surekha0% (1)
- Admth F4 Chap 8Document12 pagesAdmth F4 Chap 8Wan DanialNo ratings yet
- Complex MatricesDocument13 pagesComplex Matriceschecheche24No ratings yet
- Eigenvalues and Jordan normal formDocument9 pagesEigenvalues and Jordan normal formMike MillerNo ratings yet
- MATH 304 Linear Algebra Matrix of A Linear TransformationDocument13 pagesMATH 304 Linear Algebra Matrix of A Linear TransformationskanshahNo ratings yet
- Math5390Chapter2Document5 pagesMath5390Chapter2Mauricio AntonioNo ratings yet
- Numerical Methods For Differential Equations and ApplicationsDocument32 pagesNumerical Methods For Differential Equations and ApplicationsmileknzNo ratings yet
- HW 9Document1 pageHW 9xenkyrattvNo ratings yet
- Linear Algebra (MA - 102) Lecture - 12 Eigen Values and Eigen VectorsDocument22 pagesLinear Algebra (MA - 102) Lecture - 12 Eigen Values and Eigen VectorsPeter 2No ratings yet
- Lect3 06webDocument23 pagesLect3 06webSJ95kabirNo ratings yet
- MATHEMATICS, Lecture 1: Carmen HerreroDocument28 pagesMATHEMATICS, Lecture 1: Carmen HerreroHun HaiNo ratings yet
- Comm AlgDocument87 pagesComm AlgtolesadekebaNo ratings yet
- Math 25a Homework 8 Solutions: 1 Alison's ProblemsDocument4 pagesMath 25a Homework 8 Solutions: 1 Alison's Problemsvinicius kardecNo ratings yet
- Isometries of The Plane - BoswellDocument7 pagesIsometries of The Plane - BoswellGuido 125 LavespaNo ratings yet
- 1 Matrix Algebra: - What To ReadDocument22 pages1 Matrix Algebra: - What To ReadYagya Raj JoshiNo ratings yet
- Linear Algebra ReSupply Date II Gaussion EliminationDocument13 pagesLinear Algebra ReSupply Date II Gaussion Elimination詹子軒No ratings yet
- Assignment 11 Answers Math 130 Linear AlgebraDocument3 pagesAssignment 11 Answers Math 130 Linear AlgebraCody SageNo ratings yet
- 0 AFF Chapter3Document19 pages0 AFF Chapter3Van ViNo ratings yet
- Linear Algebra Methods in CombinatoricsDocument11 pagesLinear Algebra Methods in CombinatoricsMatheus DomingosNo ratings yet
- Aa547 Lecture Lec9XDocument12 pagesAa547 Lecture Lec9XBabiiMuffinkNo ratings yet
- Eigenvalues, Eigenvectors, Diagonalisation: City of London Academy SouthwarkDocument3 pagesEigenvalues, Eigenvectors, Diagonalisation: City of London Academy SouthwarkmailbabuNo ratings yet
- KC Border - More Than You Wanted To Know About Quadratic Forms, CaltechDocument17 pagesKC Border - More Than You Wanted To Know About Quadratic Forms, CaltechDarabaGabriellNo ratings yet
- Ee8391-Part A& Part B 5 Units PDFDocument40 pagesEe8391-Part A& Part B 5 Units PDFdharaniNo ratings yet
- Algebraic Combinatorics - Po-Shen-Loh - MOP 2011Document5 pagesAlgebraic Combinatorics - Po-Shen-Loh - MOP 2011David DavidNo ratings yet
- Lecture No Two Banach Algebra, Notations and Basic DefinitionsDocument8 pagesLecture No Two Banach Algebra, Notations and Basic DefinitionsSeif RadwanNo ratings yet
- Eigenvalues: Matrices: Geometric InterpretationDocument8 pagesEigenvalues: Matrices: Geometric InterpretationTu DuongNo ratings yet
- What It Is Like To Be A Mathematical Idiot Ellis D. CooperDocument33 pagesWhat It Is Like To Be A Mathematical Idiot Ellis D. Cooperxtalv16117No ratings yet
- 6.1 Orientation: N N 1 N N N I I NDocument6 pages6.1 Orientation: N N 1 N N N I I NYoseph Wastu WinayakaNo ratings yet
- Algebraic Methods in Combinatorics: 1 Linear Algebra ReviewDocument5 pagesAlgebraic Methods in Combinatorics: 1 Linear Algebra ReviewPurbayan ChakrabortyNo ratings yet
- Eigenvalues, Eigenvectors, and Eigenspaces of Linear Operators Math 130 Linear AlgebraDocument3 pagesEigenvalues, Eigenvectors, and Eigenspaces of Linear Operators Math 130 Linear AlgebraCody SageNo ratings yet
- Morita EquivalenceDocument8 pagesMorita EquivalenceANDREEA-ELENA DĂNĂȘELNo ratings yet
- Positive definite and semidefinite formsDocument8 pagesPositive definite and semidefinite formsbakra bundiNo ratings yet
- Linear Algebra (Bretscher) Chapter 3 Notes: 1 Image and Kernel of A Linear TransformationDocument4 pagesLinear Algebra (Bretscher) Chapter 3 Notes: 1 Image and Kernel of A Linear TransformationAlex NosratNo ratings yet
- Lecture 9 Unit2Document168 pagesLecture 9 Unit2Siddharth SidhuNo ratings yet
- Apuntes de Sociología JurídicaDocument34 pagesApuntes de Sociología JurídicaAbrahamNo ratings yet
- 4 RotationsDocument6 pages4 Rotationsavnworspace978No ratings yet
- Fundamentals of Coordinate Changes and Rotation MatricesDocument14 pagesFundamentals of Coordinate Changes and Rotation MatricesGustavo LibotteNo ratings yet
- 1522664822LinearAlgebra 1Document5 pages1522664822LinearAlgebra 1abhishekNo ratings yet
- Steepest Descent Is An Iterative Method For Solving Sparse Systems of Linear EquaDocument5 pagesSteepest Descent Is An Iterative Method For Solving Sparse Systems of Linear Equakushal bosuNo ratings yet
- Cheat Sheet (Regular Font) PDFDocument4 pagesCheat Sheet (Regular Font) PDFJosh ChandyNo ratings yet
- Assignment 10 Answers Math 130 Linear AlgebraDocument1 pageAssignment 10 Answers Math 130 Linear AlgebraCody SageNo ratings yet
- Eigenvalues and Eigenvectors: 1 2 N I II I I II IDocument2 pagesEigenvalues and Eigenvectors: 1 2 N I II I I II IB. AnshumanNo ratings yet
- Key Concepts:) y y X X (Document5 pagesKey Concepts:) y y X X (virat gandhiNo ratings yet
- Linear Algebra and Applications: Benjamin RechtDocument42 pagesLinear Algebra and Applications: Benjamin RechtKarzan Kaka SwrNo ratings yet
- Chapter 1Document11 pagesChapter 1cicin8190No ratings yet
- Danielle S. Bassett, PH.D.: Academic EmploymentDocument41 pagesDanielle S. Bassett, PH.D.: Academic EmploymentConstantin Von TsirlenNo ratings yet
- Structure Learning in Coupled Dynamical Systems and Dynamic Causal ModellingDocument20 pagesStructure Learning in Coupled Dynamical Systems and Dynamic Causal ModellingConstantin Von TsirlenNo ratings yet
- Riset - Wong - SvmtoyDocument18 pagesRiset - Wong - SvmtoyFitra BachtiarNo ratings yet
- The Hierarchically Mechanistic Mind PLRevDocument18 pagesThe Hierarchically Mechanistic Mind PLRevConstantin Von TsirlenNo ratings yet
- Non-Parametric Bayesian MethodsDocument55 pagesNon-Parametric Bayesian MethodsmachinelearnerNo ratings yet
- Probabilistic Numerics - Part IDocument86 pagesProbabilistic Numerics - Part IConstantin Von TsirlenNo ratings yet
- Matlab Command FunctionsDocument17 pagesMatlab Command FunctionsbehroozfNo ratings yet
- IBM SPSS Statistics Core System User GuideDocument286 pagesIBM SPSS Statistics Core System User GuideMark BannonNo ratings yet
- Thesis PDFDocument157 pagesThesis PDFConstantin Von TsirlenNo ratings yet
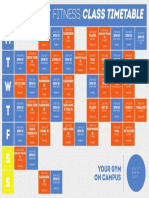
- BF TimetableDocument1 pageBF TimetableConstantin Von TsirlenNo ratings yet
- Thomson TG585 v7Document60 pagesThomson TG585 v7myio100% (1)
- Image JDocument0 pagesImage Jajay6830No ratings yet
- MP 01199Document4 pagesMP 01199Constantin Von TsirlenNo ratings yet
- Poem About BiostatisticsDocument1 pagePoem About BiostatisticsConstantin Von TsirlenNo ratings yet
- Baker Etal 1990Document9 pagesBaker Etal 1990Constantin Von TsirlenNo ratings yet
- Baker Etal 1990Document9 pagesBaker Etal 1990Constantin Von TsirlenNo ratings yet
- Historical QuotesDocument1 pageHistorical QuotesConstantin Von TsirlenNo ratings yet
- Baker Etal 1990Document9 pagesBaker Etal 1990Constantin Von TsirlenNo ratings yet
- di-ANEP DyesDocument3 pagesdi-ANEP DyesConstantin Von TsirlenNo ratings yet
- Course NotesDocument218 pagesCourse NotesrdcfhNo ratings yet
- Partial Derivatives, Jacobian and GraphsDocument10 pagesPartial Derivatives, Jacobian and GraphssrinidhiNo ratings yet
- Bicomplex Meromorphic FunctionsDocument17 pagesBicomplex Meromorphic FunctionsMarkoGeekyNo ratings yet
- Pre-Calc Trig IdentitiesDocument1 pagePre-Calc Trig Identitiessolikan45No ratings yet
- Transforms of DerivativesDocument2 pagesTransforms of Derivativesnerissa.blancoNo ratings yet
- The Art of TrigonometryDocument3 pagesThe Art of Trigonometryapi-231202726No ratings yet
- E - Class XI Physics DPP Set (01) - Mathematical ToolsDocument7 pagesE - Class XI Physics DPP Set (01) - Mathematical ToolsVijayachandran ChandranNo ratings yet
- INFINITE SERIES CONVERGENCE TESTDocument26 pagesINFINITE SERIES CONVERGENCE TESTAshley Jovian CorreaNo ratings yet
- 08 Invertibility and IsomorphismsDocument13 pages08 Invertibility and IsomorphismsConstantin Von TsirlenNo ratings yet
- Fractional Optimal Control Problems: A Simple Application in Fractional KineticsDocument7 pagesFractional Optimal Control Problems: A Simple Application in Fractional KineticsShorouk Al- IssaNo ratings yet
- Maths Z Transformation .SirDocument24 pagesMaths Z Transformation .SirAmit ChaudharyNo ratings yet
- MatLab 3 PDFDocument95 pagesMatLab 3 PDFsodgoweisjdNo ratings yet
- Maxima Minima For Several VariablesDocument20 pagesMaxima Minima For Several VariablesShirsendu ChakrabortyNo ratings yet
- Inverse Iteration Method For Finding EigenvectorsDocument4 pagesInverse Iteration Method For Finding Eigenvectors王轩No ratings yet
- PART2Document34 pagesPART2Cuauhtémoc GamaNo ratings yet
- Lecture Notes by Dr. Abdul Rauf NizamiDocument14 pagesLecture Notes by Dr. Abdul Rauf NizamiHafiz HammadNo ratings yet
- Chapter 8. Infinite Series: Le Cong NhanDocument71 pagesChapter 8. Infinite Series: Le Cong NhanKoasa NishikiNo ratings yet
- Department of Mathematics: Indian Institute of Technology, BombayDocument16 pagesDepartment of Mathematics: Indian Institute of Technology, BombayMridul ChhipaNo ratings yet
- Chapter11 PDFDocument19 pagesChapter11 PDFMiguel RamirezNo ratings yet
- Article OX Halimi AbderrazakDocument14 pagesArticle OX Halimi AbderrazakMaster MathNo ratings yet
- Gen Math NotesDocument6 pagesGen Math NotesCyfert FranciscoNo ratings yet
- Ritz Method - WikipediaDocument3 pagesRitz Method - Wikipediarpraj3135No ratings yet
- Advanced Engineering Mathematics (9 Edition) by Ervin KreyszigDocument1 pageAdvanced Engineering Mathematics (9 Edition) by Ervin KreyszigHafsa AwanNo ratings yet
- Matlab FileDocument12 pagesMatlab FileBhushan Singh BadgujjarNo ratings yet
- Lesson 29: Integration by Substitution (Worksheet Solutions)Document5 pagesLesson 29: Integration by Substitution (Worksheet Solutions)Matthew Leingang100% (3)
- Algebra Shorcuts Formulas For CAT - EDUSAATHIDocument12 pagesAlgebra Shorcuts Formulas For CAT - EDUSAATHITushar TikuNo ratings yet
- 47Document3 pages47brendannnNo ratings yet
- Linear Homogeneous Boundary Value Problems: Dr. P. DhanumjayaDocument19 pagesLinear Homogeneous Boundary Value Problems: Dr. P. DhanumjayapurijatinNo ratings yet
- Trigonometric Functions - WikipediaDocument14 pagesTrigonometric Functions - WikipediaAlone EulerNo ratings yet
- TTK4115 SummaryDocument5 pagesTTK4115 SummaryManoj GuptaNo ratings yet