You might also like
- Advances in Analog and RF IC Design for Wireless Communication SystemsFrom EverandAdvances in Analog and RF IC Design for Wireless Communication SystemsGabriele ManganaroRating: 1 out of 5 stars1/5 (1)
- Joint Trajectory and Communication Design For Multi-UAV Enabled Wireless NetworksDocument16 pagesJoint Trajectory and Communication Design For Multi-UAV Enabled Wireless Networksaz BNo ratings yet
- Concise Guide to OTN optical transport networksFrom EverandConcise Guide to OTN optical transport networksRating: 4 out of 5 stars4/5 (2)
- UAV CommunicationsDocument15 pagesUAV CommunicationsCHINCHU S RAGAMALIKA TE19-21No ratings yet
- Energy-Efficient UAV-to-User Scheduling To Maximize Throughput in Wireless NetworksDocument11 pagesEnergy-Efficient UAV-to-User Scheduling To Maximize Throughput in Wireless NetworksTrần Hoàng ThôngNo ratings yet
- Electronics 11 01036 v2Document14 pagesElectronics 11 01036 v2kasun prabhathNo ratings yet
- 2018 Cellular-Connected UAV - Potential - Challenges - and Promising TechnologiesDocument8 pages2018 Cellular-Connected UAV - Potential - Challenges - and Promising Technologiestoan đinhNo ratings yet
- Location-Based Robust Beamforming Design For Cellular-Enabled UAV CommunicationsDocument11 pagesLocation-Based Robust Beamforming Design For Cellular-Enabled UAV CommunicationsMinou LuchianoNo ratings yet
- A Tutorial On Uavs For Wireless Networks: Applications, Challenges, and Open ProblemsDocument28 pagesA Tutorial On Uavs For Wireless Networks: Applications, Challenges, and Open Problemsba beshaNo ratings yet
- 01 Accessing From The SkyDocument49 pages01 Accessing From The Skyremonadly2704No ratings yet
- 03 A Tutorial On UAVs For Wireless NetworksDocument27 pages03 A Tutorial On UAVs For Wireless Networksremonadly2704No ratings yet
- Tutorial On UAVs PDFDocument28 pagesTutorial On UAVs PDFanon_716681361No ratings yet
- Abstract - During The Last Few Years, Unmanned Aerial Vehicle (Uavs) For TheDocument6 pagesAbstract - During The Last Few Years, Unmanned Aerial Vehicle (Uavs) For TheAneelaMalikNo ratings yet
- UAV Communications For 5G and Beyond Recent Advances and Future Trends PDFDocument23 pagesUAV Communications For 5G and Beyond Recent Advances and Future Trends PDFWaleed AlmarshediNo ratings yet
- 1 s2.0 S1000936121001801 MainDocument16 pages1 s2.0 S1000936121001801 MainSaudNo ratings yet
- UAVs As Mobile Infrastructure: Addressing Battery LifetimeDocument6 pagesUAVs As Mobile Infrastructure: Addressing Battery LifetimeGeorge KaragiannidisNo ratings yet
- UAV TrajDocument55 pagesUAV TrajShashwatNo ratings yet
- Multi-Tier Drone Architecture For 5G/B5G Cellular Networks: Challenges, Trends, and ProspectsDocument9 pagesMulti-Tier Drone Architecture For 5G/B5G Cellular Networks: Challenges, Trends, and ProspectsImad SimoNo ratings yet
- 2019 A Survey On 5G Millimeter Wave Communications For UAV-Assisted Wireless NetworksDocument41 pages2019 A Survey On 5G Millimeter Wave Communications For UAV-Assisted Wireless Networkstoan đinhNo ratings yet
- Aeronautical CommunicationDocument19 pagesAeronautical CommunicationSwati SengarNo ratings yet
- Narrowband Characteristics of Air-to-Ground Propagation For UAV Assisted Networks in Urban Environments by Means of Fast Ray-Launching SimulationsDocument5 pagesNarrowband Characteristics of Air-to-Ground Propagation For UAV Assisted Networks in Urban Environments by Means of Fast Ray-Launching SimulationsPavan KalyanNo ratings yet
- Non-Terrestrial Communications Assisted by Reconfigurable Intelligent SurfacesDocument35 pagesNon-Terrestrial Communications Assisted by Reconfigurable Intelligent SurfaceshoangNo ratings yet
- SDVN: Enabling Rapid Network Innovation For Heterogeneous Vehicular CommunicationDocument6 pagesSDVN: Enabling Rapid Network Innovation For Heterogeneous Vehicular Communicationbhavana.sd86No ratings yet
- Seminar Tech Report PDFDocument3 pagesSeminar Tech Report PDFPayal DasNo ratings yet
- 2018 Game-Theoretic Approaches For Wireless Communications With Unmanned Aerial VehiclesDocument9 pages2018 Game-Theoretic Approaches For Wireless Communications With Unmanned Aerial Vehiclestoan đinhNo ratings yet
- Deep Reinforcement Learning Approach for Energy-Efficient UAV Communication CoverageDocument11 pagesDeep Reinforcement Learning Approach for Energy-Efficient UAV Communication CoverageweciiNo ratings yet
- 2019 Secure UAV Communication Networks Over 5GDocument7 pages2019 Secure UAV Communication Networks Over 5Gtoan đinhNo ratings yet
- Deployment Algorithms of Flying Base Stations: 5G and Beyond With UAVsDocument19 pagesDeployment Algorithms of Flying Base Stations: 5G and Beyond With UAVsDHRAIEF AmineNo ratings yet
- 2019 Physical Layer Security in UAV Systems - Challenges and OpportunitiesDocument8 pages2019 Physical Layer Security in UAV Systems - Challenges and Opportunitiestoan đinhNo ratings yet
- Optimal Scheduling For Unmanned Aerial Vehicle Networks With Flow-Level DynamicsDocument12 pagesOptimal Scheduling For Unmanned Aerial Vehicle Networks With Flow-Level DynamicsDang Tuan LongNo ratings yet
- Ultra-Reliable Low-Latency Communication For Aerial Vehicles Via Multi-ConnectivityDocument6 pagesUltra-Reliable Low-Latency Communication For Aerial Vehicles Via Multi-ConnectivityAmjedNo ratings yet
- High-Altitude Platforms For Wireless Communications: by T. C. Tozer and D. GraceDocument11 pagesHigh-Altitude Platforms For Wireless Communications: by T. C. Tozer and D. GracehabibNo ratings yet
- Coverage Analysis for UAV-Assisted Cellular NeDocument13 pagesCoverage Analysis for UAV-Assisted Cellular NemahmoueddiaaNo ratings yet
- Design Guidelines For Blockchain-Assisted 5G-UAV Networks: IEEE Network March 2021Document9 pagesDesign Guidelines For Blockchain-Assisted 5G-UAV Networks: IEEE Network March 2021Trần DoãnNo ratings yet
- Aeronautical Communications Seminar Report 03Document18 pagesAeronautical Communications Seminar Report 03Suryakanta Rout100% (1)
- 2018 Trajectory Optimization and Power Allocation For Multi-Hop UAV Relaying CommunicationsDocument11 pages2018 Trajectory Optimization and Power Allocation For Multi-Hop UAV Relaying Communicationstoan đinhNo ratings yet
- UAV Command and Control, Navigation and Surveillance: A Review of Potential 5G and Satellite SystemsDocument10 pagesUAV Command and Control, Navigation and Surveillance: A Review of Potential 5G and Satellite SystemsAshwin PrajapatiNo ratings yet
- A Hybrid Communication Scheme For Efficient and Low-Cost Deployment of Future Flying Ad-Hoc Network (FANET)Document22 pagesA Hybrid Communication Scheme For Efficient and Low-Cost Deployment of Future Flying Ad-Hoc Network (FANET)Habib MohammedNo ratings yet
- Massive MIMO For Communications With Drone SwarmsDocument26 pagesMassive MIMO For Communications With Drone SwarmsAsher Suranjith JayakumarNo ratings yet
- An All-in-One Dual Band Blade Antenna For ADS-B and 5G Communications in UAV Assisted Wireless NetworksDocument17 pagesAn All-in-One Dual Band Blade Antenna For ADS-B and 5G Communications in UAV Assisted Wireless NetworksdkNo ratings yet
- Aeronautical Communications Seminar Report 05Document19 pagesAeronautical Communications Seminar Report 05aslNo ratings yet
- Computer Networks: Abrar Ahmad, Adnan Ahmad Cheema, Dewar FinlayDocument10 pagesComputer Networks: Abrar Ahmad, Adnan Ahmad Cheema, Dewar FinlayZoha MalikNo ratings yet
- Wireless Communication Using Unmanned Aerial Vehicles (Uavs) OptimalDocument14 pagesWireless Communication Using Unmanned Aerial Vehicles (Uavs) OptimalElvor eskanNo ratings yet
- Submitted By: Pavankumar P.JDocument21 pagesSubmitted By: Pavankumar P.JPavan Jawalkar100% (1)
- 5G-Enabled UAVs With Command and Control SoftwareDocument16 pages5G-Enabled UAVs With Command and Control SoftwareEsmeralda ChavezNo ratings yet
- 5G Radio Access Networks A Survey - 2022 - ArrayDocument10 pages5G Radio Access Networks A Survey - 2022 - ArrayMetro Electronics ScaleNo ratings yet
- UavDocument31 pagesUavANSHUMANNo ratings yet
- Qin Et Al - 2022 - Conformal Transmitarrays For Unmanned Aerial Vehicles Aided 6G NetworksDocument7 pagesQin Et Al - 2022 - Conformal Transmitarrays For Unmanned Aerial Vehicles Aided 6G Networksadamhong0109No ratings yet
- A Survey of Channel Modeling For UAV CommunicationsDocument19 pagesA Survey of Channel Modeling For UAV CommunicationsLOCHARLA SANDEEPNo ratings yet
- UAV Swarm Position Optimization For High Capacity MIMO BackhaulDocument16 pagesUAV Swarm Position Optimization For High Capacity MIMO BackhaulquoechNo ratings yet
- NOMA-Based Hybrid Satellite-UAV-TerrestrialDocument12 pagesNOMA-Based Hybrid Satellite-UAV-TerrestrialDhshak AkbdxswNo ratings yet
- 2019 Distributed and Multilayer UAV Networks For Next-Generation Wireless Communication and Power Transfer - A Feasibility StudyDocument13 pages2019 Distributed and Multilayer UAV Networks For Next-Generation Wireless Communication and Power Transfer - A Feasibility Studytoan đinhNo ratings yet
- R A H C R A N: A C: Esource Llocation in Eterogeneous Loud Adio Ccess Etworks Dvances and HallengesDocument8 pagesR A H C R A N: A C: Esource Llocation in Eterogeneous Loud Adio Ccess Etworks Dvances and HallengesRAchit SharmaNo ratings yet
- 2016 Survey On UAV Networks For Civil Applications A Communications ViewpointDocument38 pages2016 Survey On UAV Networks For Civil Applications A Communications Viewpointtoan đinhNo ratings yet
- UAV-enhanced Network Services ArchitectureDocument9 pagesUAV-enhanced Network Services Architecturehector alvaro garzon buitragoNo ratings yet
- Reconfigurable Intelligent Surface Assisted UAV Communication Joint Trajectory Design and Passive BeamformingDocument5 pagesReconfigurable Intelligent Surface Assisted UAV Communication Joint Trajectory Design and Passive Beamformingaatmasaini1No ratings yet
- UAV Positioning For Throughput Maximization: Research Open AccessDocument15 pagesUAV Positioning For Throughput Maximization: Research Open AccessAbhishek GuptaNo ratings yet
- UAV Positioning For Throughput Maximization Using Deep Learning ApproachesDocument26 pagesUAV Positioning For Throughput Maximization Using Deep Learning ApproachesShakir HossainNo ratings yet
- Aeronautical CommunicationsDocument18 pagesAeronautical CommunicationsBibinMathewNo ratings yet
- A Wimax Payload For High Altitude Platform Experimental TrialsDocument11 pagesA Wimax Payload For High Altitude Platform Experimental TrialsHabib MohammedNo ratings yet
- A Novel Traffic Capacity Planning Methodology For LTE Radio Network DimensioningDocument6 pagesA Novel Traffic Capacity Planning Methodology For LTE Radio Network DimensioningHabib MohammedNo ratings yet
- REGION Physical Location Product Type (Gsm/Cdma/Gsm+Cd MA)Document14 pagesREGION Physical Location Product Type (Gsm/Cdma/Gsm+Cd MA)Habib MohammedNo ratings yet
- A Wimax Payload For High Altitude Platform Experimental TrialsDocument11 pagesA Wimax Payload For High Altitude Platform Experimental TrialsHabib MohammedNo ratings yet
- Long Term Evolution Network Planning and Performance MeasurementDocument8 pagesLong Term Evolution Network Planning and Performance MeasurementHabib MohammedNo ratings yet
- December 2014 Order Details ReportDocument15 pagesDecember 2014 Order Details Reportkhalid.mallick7258No ratings yet
- Digital Communications and Networks: Javaid A. Sheikh, Mehboob-ul-Amin, Shabir A. Parah, G. Mohiuddin BhatDocument10 pagesDigital Communications and Networks: Javaid A. Sheikh, Mehboob-ul-Amin, Shabir A. Parah, G. Mohiuddin BhatHabib MohammedNo ratings yet
- Company & Products: AWE CommunicationsDocument68 pagesCompany & Products: AWE CommunicationsHabib MohammedNo ratings yet
- Dynamic Formulas: Orders - GillDocument19 pagesDynamic Formulas: Orders - GillHabib MohammedNo ratings yet
- Volte: Sensitivity: InternalDocument32 pagesVolte: Sensitivity: InternalHabib MohammedNo ratings yet
- 4x4 MIMO Boosts 4G and Gives Consumers A Taste of The Gigabit ExperienceDocument26 pages4x4 MIMO Boosts 4G and Gives Consumers A Taste of The Gigabit ExperiencemathNo ratings yet
- Other-Cell Interference and Reverse Link Capacity of High Altitude Platform Station CDMA SystemDocument2 pagesOther-Cell Interference and Reverse Link Capacity of High Altitude Platform Station CDMA SystemHabib MohammedNo ratings yet
- RF Link BudgetDocument4 pagesRF Link BudgetHabib MohammedNo ratings yet
- 3-Sector Cell Vs Omnicell Cell Sectorization ImpacDocument15 pages3-Sector Cell Vs Omnicell Cell Sectorization Impacgopisetty nirupamNo ratings yet
- I E B A A B D C Wcdma: S A RDocument4 pagesI E B A A B D C Wcdma: S A RHabib MohammedNo ratings yet
- Volte: Sensitivity: InternalDocument32 pagesVolte: Sensitivity: InternalHabib MohammedNo ratings yet
- Fractional Power Control in LTE Cellular NetworksDocument53 pagesFractional Power Control in LTE Cellular NetworksHabib MohammedNo ratings yet
- December 2014 Order Details ReportDocument15 pagesDecember 2014 Order Details Reportkhalid.mallick7258No ratings yet
- Excel Tips Tricks Ebook DLDocument20 pagesExcel Tips Tricks Ebook DLAdi MahendRaNo ratings yet
- 25+ Keyboard Shortcuts for Excel Filter Dropdown MenusDocument72 pages25+ Keyboard Shortcuts for Excel Filter Dropdown MenusNandhiniNo ratings yet
- REGION Physical Location Product Type (Gsm/Cdma/Gsm+Cd MA)Document14 pagesREGION Physical Location Product Type (Gsm/Cdma/Gsm+Cd MA)Habib MohammedNo ratings yet
- Dynamic Formulas: Orders - GillDocument19 pagesDynamic Formulas: Orders - GillHabib MohammedNo ratings yet
- Type of Antenna For Each Clutter TypeDocument1 pageType of Antenna For Each Clutter TypedannyyuwonoNo ratings yet
- Downlink Performance of Cell Edge Using Cooperative BS For Multicell Cellular NetworkDocument12 pagesDownlink Performance of Cell Edge Using Cooperative BS For Multicell Cellular NetworkHabib MohammedNo ratings yet
- Creating Pivot Tables from Structured DataDocument6 pagesCreating Pivot Tables from Structured DataHabib MohammedNo ratings yet
- 25+ Keyboard Shortcuts for Excel Filter Dropdown MenusDocument72 pages25+ Keyboard Shortcuts for Excel Filter Dropdown MenusNandhiniNo ratings yet
- WIM2 Matlab Documentation V1.0Document24 pagesWIM2 Matlab Documentation V1.0Белла МихайловаNo ratings yet
- Excel Tables Examples - UnformattedDocument11 pagesExcel Tables Examples - UnformattedHabib MohammedNo ratings yet
- Downlink Performance of Cell Edge Using Cooperative BS For Multicell Cellular NetworkDocument12 pagesDownlink Performance of Cell Edge Using Cooperative BS For Multicell Cellular NetworkHabib MohammedNo ratings yet
- Towards Bandwidth-Efficient Ethernet-Based 5G Mobile Fronthaul NetworksDocument19 pagesTowards Bandwidth-Efficient Ethernet-Based 5G Mobile Fronthaul NetworksHabib MohammedNo ratings yet
- DS-RTCD905 H6W4Document2 pagesDS-RTCD905 H6W4david fonsecaNo ratings yet
- New Balance Case StudyDocument3 pagesNew Balance Case StudyDimas AdityaNo ratings yet
- ADWEA Approved Vendor List - 18.4.2013Document297 pagesADWEA Approved Vendor List - 18.4.2013Anonymous kjvaeVJNNo ratings yet
- Clone CDDocument2 pagesClone CDavk.oracleNo ratings yet
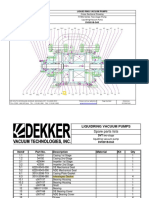
- Bomba de Vacio Part ListDocument2 pagesBomba de Vacio Part ListNayeli Zarate MNo ratings yet
- ORPHEUS by GRS Mead - Electronic Text EditionDocument199 pagesORPHEUS by GRS Mead - Electronic Text EditionMartin EuserNo ratings yet
- R4850G2 Rectifier Data Sheet 05Document2 pagesR4850G2 Rectifier Data Sheet 05PP CharlyNo ratings yet
- Mark Dyczkowski and Trika Journal March 2015 Vol.1.No.1.Document10 pagesMark Dyczkowski and Trika Journal March 2015 Vol.1.No.1.Mark Dyczkoswki and Trika Journal100% (2)
- Mikes ResumeDocument2 pagesMikes Resumeapi-312645878No ratings yet
- 5G Antenna Talk TWDocument48 pages5G Antenna Talk TWRohit MathurNo ratings yet
- Titan InvoiceDocument1 pageTitan Invoiceiamdhanush017No ratings yet
- Study Note 1 Fundamental of AccountingDocument54 pagesStudy Note 1 Fundamental of Accountingnaga naveenNo ratings yet
- Actor analysis explores decision-making in environmental governanceDocument48 pagesActor analysis explores decision-making in environmental governancerizkyNo ratings yet
- Pizza Hut Final!Document15 pagesPizza Hut Final!Alisha ParabNo ratings yet
- Material 01 - Human-Computer InteractionDocument8 pagesMaterial 01 - Human-Computer InteractionIlangmi NutolangNo ratings yet
- Julia Henzler - Resume 2 27Document1 pageJulia Henzler - Resume 2 27api-491391730No ratings yet
- Strategic Marketing Plan for British American TobaccoDocument31 pagesStrategic Marketing Plan for British American TobaccoAli Abbas50% (2)
- PDI 14 Asthma Admission RateDocument2 pagesPDI 14 Asthma Admission RatejrmyfngNo ratings yet
- Unit 5: Structural Modelling: Block II: From Analysis To DesignDocument76 pagesUnit 5: Structural Modelling: Block II: From Analysis To DesignPatrick FarahNo ratings yet
- Scotts S2048 S2554 Operators ManualDocument99 pagesScotts S2048 S2554 Operators ManualobixmtNo ratings yet
- COVID-19 and Flu Vaccination Walgreens Immunization ServicesDocument1 pageCOVID-19 and Flu Vaccination Walgreens Immunization ServicesAitana MaldonadoNo ratings yet
- Building Lean Supply ChainsDocument33 pagesBuilding Lean Supply ChainsJefri MustaphaNo ratings yet
- Living Together TestDocument2 pagesLiving Together TestProfu' de biologieNo ratings yet
- Basic Load (Individual) Veterinarian Field PackDocument3 pagesBasic Load (Individual) Veterinarian Field PackJohn MillerNo ratings yet
- Fee Structure 2023-2024Document10 pagesFee Structure 2023-2024Emmanuel NjogellahNo ratings yet
- Cell Organelles 11Document32 pagesCell Organelles 11Mamalumpong NnekaNo ratings yet
- Slide Detail For SCADADocument20 pagesSlide Detail For SCADAhakimNo ratings yet
- 2011 Mena Annual Reportv1Document73 pages2011 Mena Annual Reportv1Yasmeen LayallieNo ratings yet
- Carbon Disulfide: Hazard SummaryDocument5 pagesCarbon Disulfide: Hazard SummaryAlyssa ZerlinaNo ratings yet
- Combining Singing and PsycologyDocument6 pagesCombining Singing and PsycologyAna luciaNo ratings yet
- Artificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureFrom EverandArtificial Intelligence Revolution: How AI Will Change our Society, Economy, and CultureRating: 4.5 out of 5 stars4.5/5 (2)
- Comprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessFrom EverandComprehensive Guide to Robotic Process Automation (RPA): Tips, Recommendations, and Strategies for SuccessNo ratings yet
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (5)
- Mastering Drones - A Beginner's Guide To Start Making Money With DronesFrom EverandMastering Drones - A Beginner's Guide To Start Making Money With DronesRating: 2.5 out of 5 stars2.5/5 (3)
- Arduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!From EverandArduino: The complete guide to Arduino for beginners, including projects, tips, tricks, and programming!Rating: 4 out of 5 stars4/5 (3)
- Dark Aeon: Transhumanism and the War Against HumanityFrom EverandDark Aeon: Transhumanism and the War Against HumanityRating: 5 out of 5 stars5/5 (1)
- Atlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceFrom EverandAtlas of AI: Power, Politics, and the Planetary Costs of Artificial IntelligenceRating: 5 out of 5 stars5/5 (9)
- Artificial You: AI and the Future of Your MindFrom EverandArtificial You: AI and the Future of Your MindRating: 4 out of 5 stars4/5 (3)
- In the Age of AI: How AI and Emerging Technologies Are Disrupting Industries, Lives, and the Future of WorkFrom EverandIn the Age of AI: How AI and Emerging Technologies Are Disrupting Industries, Lives, and the Future of WorkRating: 5 out of 5 stars5/5 (1)
- What to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationFrom EverandWhat to Expect When You're Expecting Robots: The Future of Human-Robot CollaborationRating: 4.5 out of 5 stars4.5/5 (2)
- PLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsFrom EverandPLC Programming & Implementation: An Introduction to PLC Programming Methods and ApplicationsNo ratings yet
- Artificial Intelligence: From Medieval Robots to Neural NetworksFrom EverandArtificial Intelligence: From Medieval Robots to Neural NetworksRating: 4 out of 5 stars4/5 (3)
- Robotics: Designing the Mechanisms for Automated MachineryFrom EverandRobotics: Designing the Mechanisms for Automated MachineryRating: 4.5 out of 5 stars4.5/5 (8)
- Collection of Raspberry Pi ProjectsFrom EverandCollection of Raspberry Pi ProjectsRating: 5 out of 5 stars5/5 (1)
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Design and Operation of Human Locomotion SystemsFrom EverandDesign and Operation of Human Locomotion SystemsMarco CecarelliNo ratings yet
- Modeling, Dynamics, and Control of Electrified VehiclesFrom EverandModeling, Dynamics, and Control of Electrified VehiclesRating: 5 out of 5 stars5/5 (1)
- ChatGPT: The Future of Intelligent ConversationFrom EverandChatGPT: The Future of Intelligent ConversationRating: 3.5 out of 5 stars3.5/5 (8)
- Create Profitable Side Hustles with Artificial IntelligenceFrom EverandCreate Profitable Side Hustles with Artificial IntelligenceNo ratings yet
- Artificial Intelligence: Data Analytics and Innovation for BeginnersFrom EverandArtificial Intelligence: Data Analytics and Innovation for BeginnersRating: 5 out of 5 stars5/5 (3)