You might also like
- 11 RECT TANK 4.0M X 3.0M X 3.3M H - Flocculator PDFDocument3 pages11 RECT TANK 4.0M X 3.0M X 3.3M H - Flocculator PDFaaditya chopadeNo ratings yet
- Beam Design LRFD Aci 318-14Document6 pagesBeam Design LRFD Aci 318-14Usman AfzalNo ratings yet
- Design of Axially Loaded Sloped Footing DataDocument11 pagesDesign of Axially Loaded Sloped Footing DataFatima tuz ZohraNo ratings yet
- Check For Punching Shear:: Pile Cap Design (PC3a)Document6 pagesCheck For Punching Shear:: Pile Cap Design (PC3a)Sheikh Mizanur RahmanNo ratings yet
- Breeder House FoundationDocument16 pagesBreeder House FoundationRobbyTeresaNo ratings yet
- Cladding& Runner DesignDocument1 pageCladding& Runner DesignDeepmalaJayeshNo ratings yet
- Beam Shear & Moment DiagramDocument8 pagesBeam Shear & Moment DiagramAnantPawarNo ratings yet
- Mat Foundation Fem Data: Width L: 9.50M Length: 10.0MDocument6 pagesMat Foundation Fem Data: Width L: 9.50M Length: 10.0MV.m. RajanNo ratings yet
- 4 stiffened-WH500X400X12X25-WH500X400X12X25Document7 pages4 stiffened-WH500X400X12X25-WH500X400X12X25phanikrishnabNo ratings yet
- UGTANKDocument3 pagesUGTANKAjay SastryNo ratings yet
- تصميم الكمرات بطريقة ultimate PDFDocument42 pagesتصميم الكمرات بطريقة ultimate PDFqaisalkurdyNo ratings yet
- Analysis of Isolated Footing Subjected To AF and High BM-ICJ-June 2014Document21 pagesAnalysis of Isolated Footing Subjected To AF and High BM-ICJ-June 2014varam1No ratings yet
- PDS STAAD Foundation Advanced LTR EN LR PDFDocument2 pagesPDS STAAD Foundation Advanced LTR EN LR PDFAndres Felipe Forero GacharnáNo ratings yet
- ACI 318-08 Beam DesignDocument10 pagesACI 318-08 Beam DesignSimit MehtaNo ratings yet
- Beam DesignDocument7 pagesBeam DesignKasi ViswanathanNo ratings yet
- Here: Mat Foundation Design Spreadsheet PDFDocument2 pagesHere: Mat Foundation Design Spreadsheet PDFbiniamNo ratings yet
- Earthquake Load Calculation (Base Shear Method) : Rigid FrameDocument4 pagesEarthquake Load Calculation (Base Shear Method) : Rigid FrameJohn Rheynor MayoNo ratings yet
- Design of BracingDocument4 pagesDesign of Bracingankkeshmundra1No ratings yet
- Calculation of Wind PressureDocument3 pagesCalculation of Wind PressureRay Kinnaird100% (1)
- Structural Analysis and Design ofDocument16 pagesStructural Analysis and Design ofELMERNo ratings yet
- Steel ColumnDocument2 pagesSteel ColumnNikki Roberts100% (2)
- Isolated Footing Design Spread SheetDocument16 pagesIsolated Footing Design Spread SheetD.V.Srinivasa Rao100% (1)
- Estimating Deadloads On Timber CanopiesDocument1 pageEstimating Deadloads On Timber CanopiesConrad HarrisonNo ratings yet
- Response Spectrum Specification As Per ISCODEDocument5 pagesResponse Spectrum Specification As Per ISCODESaphal LamichhaneNo ratings yet
- Deflection Check For Cp-65Document1 pageDeflection Check For Cp-65Hari Amudhan IlanchezhianNo ratings yet
- Column Base PlateDocument3 pagesColumn Base PlatePurnima ArkalgudNo ratings yet
- Large SpanDocument27 pagesLarge SpanManishJangidNo ratings yet
- UBC Static Design Base ShearDocument4 pagesUBC Static Design Base ShearklynchelleNo ratings yet
- ETABSDocument9 pagesETABSsorowareNo ratings yet
- EV302 2 Flexibility MethodDocument8 pagesEV302 2 Flexibility MethodMoses HonNo ratings yet
- Connection DesignDocument33 pagesConnection DesignSri KalyanNo ratings yet
- An Analytical and Comparitive Study of Composite and RCC Multi Storey BuildingsDocument15 pagesAn Analytical and Comparitive Study of Composite and RCC Multi Storey BuildingsRakkeshKudullaNo ratings yet
- Staad Performance AnalysisDocument4 pagesStaad Performance AnalysisGelbert SilotNo ratings yet
- ZamilDocument3 pagesZamilNguyen KhoiNo ratings yet
- Seismic Load ComputationDocument5 pagesSeismic Load ComputationAiron Kaye SameloNo ratings yet
- Staad Tutor Wood FramingDocument5 pagesStaad Tutor Wood FramingVenkatesan VaradhanNo ratings yet
- PILE FOUNDATION DESIGN Manual Cal - CommentsDocument6 pagesPILE FOUNDATION DESIGN Manual Cal - CommentsDilip PatelNo ratings yet
- ACI Beam LedgeDocument7 pagesACI Beam LedgeMahmoud ShakerNo ratings yet
- Calculation Sheets NZS 3604Document5 pagesCalculation Sheets NZS 3604TuroyNo ratings yet
- Software Verification: Example 17Document8 pagesSoftware Verification: Example 17sancloudNo ratings yet
- RAM Conncetion Standalone Manual PDFDocument34 pagesRAM Conncetion Standalone Manual PDFThanit ThanadirekNo ratings yet
- CorbelDocument2 pagesCorbelAbdullah Al MamunNo ratings yet
- W12x30 Beam To BeamDocument6 pagesW12x30 Beam To BeamWin ThanNo ratings yet
- Steel Plate Gate DesignDocument5 pagesSteel Plate Gate DesignvsnsfbNo ratings yet
- Designing Steel Structures For Deflection - TRNC03044Document36 pagesDesigning Steel Structures For Deflection - TRNC03044AKSNo ratings yet
- SX019a-Example Column Base Connection Under Axial Compression PDFDocument5 pagesSX019a-Example Column Base Connection Under Axial Compression PDFdvelchev100% (1)
- 02 12 16 Member DesignDocument2 pages02 12 16 Member DesignclarkgaguiNo ratings yet
- T - Sections Half H.E.A.: X XB XT X X y y y M T / 2 2 4 3 3 4 3 - 2 2 / 2 / WebDocument1 pageT - Sections Half H.E.A.: X XB XT X X y y y M T / 2 2 4 3 3 4 3 - 2 2 / 2 / WebAlden CayagaNo ratings yet
- Simple Span Beam MathcadDocument9 pagesSimple Span Beam Mathcadsebastian9033No ratings yet
- Wind Load IS875Document30 pagesWind Load IS875Pranjal Pareek100% (2)
- SteelColumn 8Document8 pagesSteelColumn 8Mahbub AlamNo ratings yet
- RCC21 Subframe AnalysisDocument9 pagesRCC21 Subframe AnalysisZayyan RomjonNo ratings yet
- "Frame" - Portal and Gable Rigid Plane Frame Analysis: Program DescriptionDocument12 pages"Frame" - Portal and Gable Rigid Plane Frame Analysis: Program DescriptionCharles Rodríguez SalinasNo ratings yet
- Frame - Portal and Gable Rigid Plane Frame AnalysisDocument6 pagesFrame - Portal and Gable Rigid Plane Frame AnalysisCarlos Valverde PortillaNo ratings yet
- BeamanalDocument7 pagesBeamanalAiman Amir100% (1)
- BEAMANAL (Metric) CopieDocument19 pagesBEAMANAL (Metric) Copierelu59No ratings yet
- FRAMEDocument209 pagesFRAMELeeCH LeeCHNo ratings yet
- Boef - Beam On Elastic Foundation AnalysisDocument5 pagesBoef - Beam On Elastic Foundation AnalysisDavidParedesNo ratings yet
- Beam On Elastic Foundation AnalysisDocument5 pagesBeam On Elastic Foundation Analysisbuffyto5377100% (1)
- Detail B: Page 1 of 2Document5 pagesDetail B: Page 1 of 2namasralNo ratings yet
- Tank Calculation Sheet: I. Design Parameters: TK-9291-01 Demulsifier Injection TankDocument1 pageTank Calculation Sheet: I. Design Parameters: TK-9291-01 Demulsifier Injection TanknamasralNo ratings yet
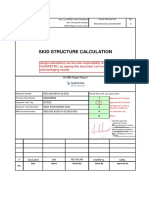
- Skid Structure Calculation Rev.a - MBD - APPROVEDDocument45 pagesSkid Structure Calculation Rev.a - MBD - APPROVEDnamasral100% (6)
- Pipe Database WeeblyDocument8 pagesPipe Database WeeblynamasralNo ratings yet
- 10 Most Popular Excel TricksDocument27 pages10 Most Popular Excel Tricksjoamer66No ratings yet
- Padeye Design CheekDocument3 pagesPadeye Design CheekBolarinwa89% (9)
- Legend: Marine Energy Sdn. Bhd. SapurakencanaDocument1 pageLegend: Marine Energy Sdn. Bhd. SapurakencananamasralNo ratings yet
- Allowable Secondary Stress..Document7 pagesAllowable Secondary Stress..namasralNo ratings yet
- 2013.10.03 - Pocket Welding Detail PDFDocument1 page2013.10.03 - Pocket Welding Detail PDFnamasralNo ratings yet
- B (MM) L (MM) B + L Length (M) Qty No of Face Area: ChannelDocument8 pagesB (MM) L (MM) B + L Length (M) Qty No of Face Area: ChannelnamasralNo ratings yet
- Typical P&ID Arrangement - Pig LAUNCHERDocument3 pagesTypical P&ID Arrangement - Pig LAUNCHERnamasralNo ratings yet
- Ral Colours For Coloursplash LockersDocument5 pagesRal Colours For Coloursplash Lockersnamasral100% (1)
- Nozzle Design Under Internal PressureDocument1 pageNozzle Design Under Internal PressurenamasralNo ratings yet
- Butt Weld Branch OutletDocument2 pagesButt Weld Branch OutletnamasralNo ratings yet
- ASME Fatigue Life CurvesDocument3 pagesASME Fatigue Life CurvesnamasralNo ratings yet
- Roof Calculation Book - UBC DESIGN PDFDocument70 pagesRoof Calculation Book - UBC DESIGN PDFStephanie CampbellNo ratings yet
- COADE's Application of Welding Research Council Bulletins 107, 297 and 368Document3 pagesCOADE's Application of Welding Research Council Bulletins 107, 297 and 368shivabtowin3301100% (3)
- WRC 297 RWE NODE 6340 25febDocument4 pagesWRC 297 RWE NODE 6340 25febnamasralNo ratings yet
- Okken Installation GuideDocument47 pagesOkken Installation GuideMahmoud FawzyNo ratings yet
- Mechanical Engineering ExaminationDocument4 pagesMechanical Engineering ExaminationViswa Nathan0% (1)
- Nathan - DCG UE 12 - Anglais Appliqué Aux Affaires - Manuel & Applications - 3e Édition 2016 - Corrigés PDFDocument247 pagesNathan - DCG UE 12 - Anglais Appliqué Aux Affaires - Manuel & Applications - 3e Édition 2016 - Corrigés PDFZiad AlaouiNo ratings yet
- Chapter 3 LevellingDocument16 pagesChapter 3 LevellingMekuannint DemekeNo ratings yet
- Design NewDocument9 pagesDesign NewArdago LenggaNo ratings yet
- A Review On BIM-based Automated Code Compliance Checking SystemDocument6 pagesA Review On BIM-based Automated Code Compliance Checking SystemKavish BhagwatNo ratings yet
- FSC-GUI-30-004 EN - Guidance On FSC P2 and P3 - 2005Document35 pagesFSC-GUI-30-004 EN - Guidance On FSC P2 and P3 - 2005Mayra CortesNo ratings yet
- Ibm 6558-03NDocument6 pagesIbm 6558-03NJose Roberto PirolaNo ratings yet
- Astm A827-14Document3 pagesAstm A827-14Артем Титов100% (1)
- Chapter - Three - Graphical Data Analysis v3Document38 pagesChapter - Three - Graphical Data Analysis v3Sahar SanaNo ratings yet
- ABB UNITROL 1005 1010 1020 EN RevF PDFDocument14 pagesABB UNITROL 1005 1010 1020 EN RevF PDFmuhammad hasan azharNo ratings yet
- Logforum: Intelligent Food PackagingDocument9 pagesLogforum: Intelligent Food PackagingMuhammad aldi sofyanNo ratings yet
- 10 HP SME AIR COMPRESSOR 2 NosDocument5 pages10 HP SME AIR COMPRESSOR 2 NosShivam AcharyaNo ratings yet
- School Form 1 School Register For Senior High School (SF1-SHS)Document38 pagesSchool Form 1 School Register For Senior High School (SF1-SHS)Lynelle QuinalNo ratings yet
- Review and Critical Thinking QuesionDocument2 pagesReview and Critical Thinking QuesionIkmal AhmadNo ratings yet
- CH 5Document21 pagesCH 5Yosef KetemaNo ratings yet
- MSC Trainings 2015Document45 pagesMSC Trainings 2015Francesco BNo ratings yet
- Rubric For A Research ProjectDocument6 pagesRubric For A Research ProjectSifu KNo ratings yet
- Google Is Now Alphabet, But What's The Corporate Strategy? Student's Name Institution Affiliation DateDocument6 pagesGoogle Is Now Alphabet, But What's The Corporate Strategy? Student's Name Institution Affiliation DateSam OburuNo ratings yet
- Crossed Roller Bearings - (E)Document20 pagesCrossed Roller Bearings - (E)akhmad saefulNo ratings yet
- Tutorial 7.5Document2 pagesTutorial 7.5sidNo ratings yet
- JRVelasco - Lesson 21, Art AppreciationDocument4 pagesJRVelasco - Lesson 21, Art AppreciationJon Ruemer Pontawe VelascoNo ratings yet
- GEA Lithium Battery Material Drying Spray Tcm11 34880Document10 pagesGEA Lithium Battery Material Drying Spray Tcm11 34880xianghuaokNo ratings yet
- Synopsis Ali HaiderDocument8 pagesSynopsis Ali HaideraleehaiderjuttNo ratings yet
- Monarch TT 30Document4 pagesMonarch TT 30Migue ToasaNo ratings yet
- The Wisdom of The Cherry Tree - Michael BraungartDocument5 pagesThe Wisdom of The Cherry Tree - Michael BraungartTheoGregoireNo ratings yet
- P3.33 ReklaitisDocument32 pagesP3.33 ReklaitisMelyana ThoresiaNo ratings yet
- The Saho of EritreaDocument28 pagesThe Saho of EritreaahahaNo ratings yet
- Isocop Rev 07-11-2012 - ENGLDocument15 pagesIsocop Rev 07-11-2012 - ENGLAlexandru RucareanuNo ratings yet
- Module 3A: Designing Instruction in Different Learning Delivery Modalities Lesson 1: Understanding The Different LdmsDocument12 pagesModule 3A: Designing Instruction in Different Learning Delivery Modalities Lesson 1: Understanding The Different LdmsRutchelNo ratings yet
- The Ultimate Random Encounters Book: Hundreds of Original Encounters to Help Bring Your Next RPG Adventure to LifeFrom EverandThe Ultimate Random Encounters Book: Hundreds of Original Encounters to Help Bring Your Next RPG Adventure to LifeRating: 5 out of 5 stars5/5 (1)
- The No-Prep Gamemaster: Or How I Learned to Stop Worrying and Love Random TablesFrom EverandThe No-Prep Gamemaster: Or How I Learned to Stop Worrying and Love Random TablesRating: 4.5 out of 5 stars4.5/5 (16)
- The Monsters Know What They're Doing: Combat Tactics for Dungeon MastersFrom EverandThe Monsters Know What They're Doing: Combat Tactics for Dungeon MastersRating: 5 out of 5 stars5/5 (5)
- The Ultimate RPG Character Backstory Guide: Prompts and Activities to Create the Most Interesting Story for Your CharacterFrom EverandThe Ultimate RPG Character Backstory Guide: Prompts and Activities to Create the Most Interesting Story for Your CharacterRating: 4 out of 5 stars4/5 (13)
- Random Tables: Cities and Towns: The Game Master's Companion for Developing Inns, Shops, Taverns, Settlements, and MoreFrom EverandRandom Tables: Cities and Towns: The Game Master's Companion for Developing Inns, Shops, Taverns, Settlements, and MoreRating: 5 out of 5 stars5/5 (2)
- World of Warcraft: Vol'jin: Shadows of the HordeFrom EverandWorld of Warcraft: Vol'jin: Shadows of the HordeRating: 4.5 out of 5 stars4.5/5 (78)
- Düngeonmeister: 75 Epic RPG Cocktail Recipes to Shake Up Your CampaignFrom EverandDüngeonmeister: 75 Epic RPG Cocktail Recipes to Shake Up Your CampaignRating: 5 out of 5 stars5/5 (1)
- Stargrave: Science Fiction Wargames in the Ravaged GalaxyFrom EverandStargrave: Science Fiction Wargames in the Ravaged GalaxyRating: 3.5 out of 5 stars3.5/5 (3)
- Journey: A Solo Roleplaying Game and Worldbuilding Tool for Writers, Game Masters, and the Uncommonly CuriousFrom EverandJourney: A Solo Roleplaying Game and Worldbuilding Tool for Writers, Game Masters, and the Uncommonly CuriousRating: 5 out of 5 stars5/5 (4)
- World of Warcraft: The Dragonflight Codex: (A Definitive Guide to the Dragons of Azeroth)From EverandWorld of Warcraft: The Dragonflight Codex: (A Definitive Guide to the Dragons of Azeroth)No ratings yet
- So You Want To Be A Game Master: Everything You Need to Start Your Tabletop Adventure for Dungeon's and Dragons, Pathfinder, and Other SystemsFrom EverandSo You Want To Be A Game Master: Everything You Need to Start Your Tabletop Adventure for Dungeon's and Dragons, Pathfinder, and Other SystemsRating: 5 out of 5 stars5/5 (2)
- Tabletop Role-Playing Therapy: A Guide for the Clinician Game MasterFrom EverandTabletop Role-Playing Therapy: A Guide for the Clinician Game MasterNo ratings yet
- The Silver Bayonet: A Wargame of Napoleonic Gothic HorrorFrom EverandThe Silver Bayonet: A Wargame of Napoleonic Gothic HorrorRating: 4.5 out of 5 stars4.5/5 (2)