You might also like
- Electronic Systems: Study Topics in Physics Book 8From EverandElectronic Systems: Study Topics in Physics Book 8Rating: 5 out of 5 stars5/5 (1)
- (4758) - 554 T.E. (Electrical) Control System - I (2012 Course) (Semester - II) (303147) (End - Semester)Document3 pages(4758) - 554 T.E. (Electrical) Control System - I (2012 Course) (Semester - II) (303147) (End - Semester)Shubham KaklijNo ratings yet
- Nov Dec 2016Document4 pagesNov Dec 2016Shubham KaklijNo ratings yet
- Set A Roll 1-16Document2 pagesSet A Roll 1-16jagat bhusalNo ratings yet
- Ee 14402Document2 pagesEe 14402vivanNo ratings yet
- Module Bank Control systemsDocument4 pagesModule Bank Control systemsgnandini72561No ratings yet
- JNTU Old Question Papers 2007Document7 pagesJNTU Old Question Papers 2007Srinivasa Rao GNo ratings yet
- CS Dec 18Document3 pagesCS Dec 18SAURABH BHISENo ratings yet
- May_Jun_2016Document4 pagesMay_Jun_2016ABC CheckNo ratings yet
- COE-09-6th SemDocument12 pagesCOE-09-6th SemShobhit SaxenaNo ratings yet
- CS Previous Question PapersDocument48 pagesCS Previous Question PapersShaleva SinghNo ratings yet
- Digital Control Systems DocumentsDocument8 pagesDigital Control Systems DocumentschenumallaNo ratings yet
- Question Paper Code:: Reg. No.Document3 pagesQuestion Paper Code:: Reg. No.HOD ECE KNCETNo ratings yet
- B.E. (Chemical) Process Dynamics & Control: Time: 2 Hours) (Max. Marks: 70 Instructions To The CandidatesDocument41 pagesB.E. (Chemical) Process Dynamics & Control: Time: 2 Hours) (Max. Marks: 70 Instructions To The CandidatesdGNo ratings yet
- Advanced Control Systems Exam ReviewDocument2 pagesAdvanced Control Systems Exam ReviewMourougapragash SubramanianNo ratings yet
- March 2022Document2 pagesMarch 2022Narmada BheemaNo ratings yet
- PTEE7301 April-2021Document2 pagesPTEE7301 April-2021imman46920No ratings yet
- Nr220405-Control SystemsDocument8 pagesNr220405-Control SystemsSRINIVASA RAO GANTANo ratings yet
- Code - No: 45106Document2 pagesCode - No: 45106Raj SamuelNo ratings yet
- WWW - Manaresults.Co - In: Define Stability. What Is Routh Stability Criterion?Document2 pagesWWW - Manaresults.Co - In: Define Stability. What Is Routh Stability Criterion?mushahedNo ratings yet
- BDA 30703 Sem 1 1213 PDFDocument7 pagesBDA 30703 Sem 1 1213 PDFJevine LaiNo ratings yet
- CI1 Control and Instrumentation Test Jan 2019Document10 pagesCI1 Control and Instrumentation Test Jan 2019MeowNo ratings yet
- 2018 Sem EndDocument2 pages2018 Sem EndahmadNo ratings yet
- Nov_Dec_2014Document4 pagesNov_Dec_2014ABC CheckNo ratings yet
- 115 Ad 032016Document2 pages115 Ad 032016SANKARA REDDYNo ratings yet
- Thapathali Campus: Subject:-Control SystemDocument2 pagesThapathali Campus: Subject:-Control Systemjagat bhusalNo ratings yet
- May_Jun_2015Document4 pagesMay_Jun_2015ABC CheckNo ratings yet
- CS Dec 15Document3 pagesCS Dec 15SAURABH BHISENo ratings yet
- DIGITAL CONTROL SYSTEMS April 2018Document8 pagesDIGITAL CONTROL SYSTEMS April 2018KOTHYADA JOSHNANo ratings yet
- Cs April 2011Document8 pagesCs April 201129viswa12No ratings yet
- CSS 22531-2023-Summer-question-paper EGDocument4 pagesCSS 22531-2023-Summer-question-paper EGrushikarande0024No ratings yet
- Control Systems Question Paper 2021 Calcutta University BTech EEDocument3 pagesControl Systems Question Paper 2021 Calcutta University BTech EEAkash RoyNo ratings yet
- EC2257 Control Systems Question Paper Code 11287Document5 pagesEC2257 Control Systems Question Paper Code 11287Nishanth NiraiNo ratings yet
- Question Paper Code:: (10×2 20 Marks)Document4 pagesQuestion Paper Code:: (10×2 20 Marks)MohamedNo ratings yet
- Oct 2016 PDFDocument2 pagesOct 2016 PDFsunny gaikwadNo ratings yet
- 115DU122016 JNTUH Exam PapersDocument2 pages115DU122016 JNTUH Exam PapersethanNo ratings yet
- Control Systems Exam QuestionsDocument2 pagesControl Systems Exam QuestionsDepartment of Electronics and Communication Engineering AKNUNo ratings yet
- 4364 523 CsiiDocument4 pages4364 523 Csiiyogesh_b_kNo ratings yet
- 115 Du 122016Document2 pages115 Du 122016SANKARA REDDYNo ratings yet
- 125 Du 112017Document3 pages125 Du 112017SANKARA REDDYNo ratings yet
- EC 2255 Control SystemsDocument5 pagesEC 2255 Control SystemsselvijeganNo ratings yet
- Dec. EC409-C - Ktu QbankDocument3 pagesDec. EC409-C - Ktu QbankNISHANT KUMARNo ratings yet
- Digital Control Systems May 2007 Question PaperDocument8 pagesDigital Control Systems May 2007 Question Paperelimelek100% (3)
- 141312-141701-Control - Winter - 2013 CT PDFDocument2 pages141312-141701-Control - Winter - 2013 CT PDFvisupinuNo ratings yet
- Jntuh Used Paper Aug-2022: (Common To ECE, EIE)Document2 pagesJntuh Used Paper Aug-2022: (Common To ECE, EIE)Shiva GlennNo ratings yet
- April - 2018-19Document3 pagesApril - 2018-19SaikumarNo ratings yet
- Advanced Control Systems ExamDocument12 pagesAdvanced Control Systems ExamHimanshu VohraNo ratings yet
- CSD W-2022Document2 pagesCSD W-2022Heet PatelNo ratings yet
- Csmodel 2Document4 pagesCsmodel 2Anonymous L7XrxpeI1zNo ratings yet
- Nov_Dec_2016Document4 pagesNov_Dec_2016ABC CheckNo ratings yet
- r05322201 Digital and Optimal Control SystemsDocument8 pagesr05322201 Digital and Optimal Control SystemsSRINIVASA RAO GANTANo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological Universityfeyayel988No ratings yet
- 2021 Exam Ufmfw7153 Online Exams - 1705334350872Document11 pages2021 Exam Ufmfw7153 Online Exams - 1705334350872family7482pleaseNo ratings yet
- R13 - Control Systems Exam QuestionsDocument2 pagesR13 - Control Systems Exam QuestionsmushahedNo ratings yet
- CS May 18Document3 pagesCS May 18SAURABH BHISENo ratings yet
- Linear Control Systems Dec 2022Document3 pagesLinear Control Systems Dec 2022sparky.zip0015No ratings yet
- Gujarat Technological UniversityDocument3 pagesGujarat Technological Universityfeyayel988No ratings yet
- UNECE R118 Proposed Changes to Annex 6 and 8 Horizontal Vertical Burn TestsDocument6 pagesUNECE R118 Proposed Changes to Annex 6 and 8 Horizontal Vertical Burn TestsShubham KaklijNo ratings yet
- MPQ2908 - 48V Buck Converter Automotive Reference DesignDocument4 pagesMPQ2908 - 48V Buck Converter Automotive Reference DesignShubham KaklijNo ratings yet
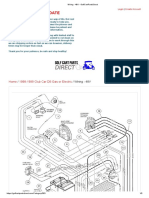
- Wiring - 48V - GolfCartPartsDirectDocument5 pagesWiring - 48V - GolfCartPartsDirectShubham KaklijNo ratings yet
- 48V DC - DC Converter - Mild Hybrid DC - DC Converter - EatonDocument3 pages48V DC - DC Converter - Mild Hybrid DC - DC Converter - EatonShubham KaklijNo ratings yet
- Relays Cautions For Use - Automation Controls - Industrial Devices - PanasonicDocument16 pagesRelays Cautions For Use - Automation Controls - Industrial Devices - PanasonicShubham KaklijNo ratings yet
- Tigor Owners Manual PDFDocument200 pagesTigor Owners Manual PDFHelloNo ratings yet
- Tata LPK 2516 C Euro-II Parts ListDocument550 pagesTata LPK 2516 C Euro-II Parts ListShubham KaklijNo ratings yet
- Tata Hexa Owners ManualDocument447 pagesTata Hexa Owners ManualShubham KaklijNo ratings yet
- Tigor Owners Manual PDFDocument200 pagesTigor Owners Manual PDFHelloNo ratings yet
- AutoTrends 16 मोड वाटरप्रूफ 16 पैटर्न यूनिवर्सल बाइक हैज़र्ड फ्लैशर रिले एलईडी - बल्ब इंडिकेटर के लिए - Amazon.in - कार और मोटरबाइकDocument6 pagesAutoTrends 16 मोड वाटरप्रूफ 16 पैटर्न यूनिवर्सल बाइक हैज़र्ड फ्लैशर रिले एलईडी - बल्ब इंडिकेटर के लिए - Amazon.in - कार और मोटरबाइकShubham KaklijNo ratings yet
- Tata Hexa Owners ManualDocument447 pagesTata Hexa Owners ManualShubham KaklijNo ratings yet
- Tata LPK 2516 C Euro-II Parts ListDocument550 pagesTata LPK 2516 C Euro-II Parts ListShubham KaklijNo ratings yet
- UNECE R118 Proposed Changes to Annex 6 and 8 Horizontal Vertical Burn TestsDocument6 pagesUNECE R118 Proposed Changes to Annex 6 and 8 Horizontal Vertical Burn TestsShubham KaklijNo ratings yet
- E Rickshaw Speedometer, E Rickshaw Speedometer, Electric Rickshaw Meter, ई रिक्शा मीटर - Karan Trading Company, Delhi - ID - 16377232773Document4 pagesE Rickshaw Speedometer, E Rickshaw Speedometer, Electric Rickshaw Meter, ई रिक्शा मीटर - Karan Trading Company, Delhi - ID - 16377232773Shubham KaklijNo ratings yet
- Super 1103 Universal Musical 3-Pin Flasher - Amazon - in - Car & MotorbikeDocument6 pagesSuper 1103 Universal Musical 3-Pin Flasher - Amazon - in - Car & MotorbikeShubham KaklijNo ratings yet
- E Rickshaw Speed Meter at Best Price in New Delhi, Delhi - MA INTERNATIONALDocument9 pagesE Rickshaw Speed Meter at Best Price in New Delhi, Delhi - MA INTERNATIONALShubham KaklijNo ratings yet
- 3 Pin Fix Flash Rate Turn Signal Cf14 Flasher Relay Led Indicator BulbsDocument3 pages3 Pin Fix Flash Rate Turn Signal Cf14 Flasher Relay Led Indicator BulbsShubham KaklijNo ratings yet
- Creo Parametric Help CenterDocument1 pageCreo Parametric Help CenterShubham KaklijNo ratings yet
- Development and Installation of Battery Powered Electric Vehicle Wiring System PDFDocument5 pagesDevelopment and Installation of Battery Powered Electric Vehicle Wiring System PDFRaguraman ShenbagarajanNo ratings yet
- Headlight Relay Wiring - GTSparkplugsDocument4 pagesHeadlight Relay Wiring - GTSparkplugsShubham KaklijNo ratings yet
- Headlight Relay Wiring - GTSparkplugsDocument4 pagesHeadlight Relay Wiring - GTSparkplugsShubham KaklijNo ratings yet
- 1232E Datasheet enDocument6 pages1232E Datasheet enASIFNo ratings yet
- Tutorial For Designing Engine Case - GrabCAD TutorialsDocument52 pagesTutorial For Designing Engine Case - GrabCAD TutorialsShubham KaklijNo ratings yet
- Proe CablingDocument18 pagesProe Cablingbiskuitul2788No ratings yet
- Simple Spring in PTC CREO PARAMETRIC 3.0 - GrabCAD TutorialsDocument9 pagesSimple Spring in PTC CREO PARAMETRIC 3.0 - GrabCAD TutorialsShubham KaklijNo ratings yet
- Amendment Ntecl689Document2 pagesAmendment Ntecl689Shubham KaklijNo ratings yet
- Using Advanced Blend Option in Creo Parametric - GrabCAD TutorialsDocument4 pagesUsing Advanced Blend Option in Creo Parametric - GrabCAD TutorialsShubham KaklijNo ratings yet
- 5326 5328 PDFDocument1 page5326 5328 PDFShubham KaklijNo ratings yet
- (5058) - 347 T.E. (Electrical) Power System - Ii (2012 Course)Document3 pages(5058) - 347 T.E. (Electrical) Power System - Ii (2012 Course)Shubham KaklijNo ratings yet
- 22m Fast Patrol Craft Features & SpecsDocument1 page22m Fast Patrol Craft Features & SpecsNico BossiNo ratings yet
- Food, Family, and FriendshipsDocument256 pagesFood, Family, and FriendshipsBianca PradoNo ratings yet
- Eddy Current Testing Exam Questions Assignment2Document1 pageEddy Current Testing Exam Questions Assignment2Narotam Kumar GupteshwarNo ratings yet
- Science Grade 7Document8 pagesScience Grade 7Lacus ClyneNo ratings yet
- Hospital NetworkDocument36 pagesHospital NetworkAbhishek MishraNo ratings yet
- Cardiopulmonary Physiotherapy in Trauma An Evidence-Based ApproachDocument3 pagesCardiopulmonary Physiotherapy in Trauma An Evidence-Based ApproachGme RpNo ratings yet
- Piano: Grade 2: PiecesDocument4 pagesPiano: Grade 2: PiecesnolozeNo ratings yet
- Business PolicyDocument17 pagesBusiness PolicyManish SinghNo ratings yet
- Philippine Christian University Graduate School of Business and Management Integrated Syllabi ModuleDocument5 pagesPhilippine Christian University Graduate School of Business and Management Integrated Syllabi ModuleRoselle Anne Luna GuatatoNo ratings yet
- PariharaDocument2 pagesPariharahrvNo ratings yet
- A933 Transistor DatasheetDocument5 pagesA933 Transistor Datasheetshorman67134No ratings yet
- Chapter Three: Business Plan PreparationDocument26 pagesChapter Three: Business Plan PreparationwaqoleNo ratings yet
- Metal Expansion Joint 2020 v2 20MBDocument116 pagesMetal Expansion Joint 2020 v2 20MBanni trejoNo ratings yet
- Measure Science AccuratelyDocument41 pagesMeasure Science AccuratelyAnthony QuanNo ratings yet
- Tata Steel-MDP SessionDocument69 pagesTata Steel-MDP Sessionsasharma82No ratings yet
- Gen Z WhitepaperDocument13 pagesGen Z Whitepaperjurgute2000No ratings yet
- Complete Tds CourseDocument32 pagesComplete Tds CourseAMLANNo ratings yet
- LC1D150M7: Product Data SheetDocument3 pagesLC1D150M7: Product Data SheetTrong Hung NguyenNo ratings yet
- 水印AMSCO® Advanced Placement® European History, 水印2nd Edition (Perfection Learning Authors)Document764 pages水印AMSCO® Advanced Placement® European History, 水印2nd Edition (Perfection Learning Authors)Cherry panNo ratings yet
- Engine Technology Course A/F Control Classroom TrainingDocument14 pagesEngine Technology Course A/F Control Classroom Traininglongtrandang5867No ratings yet
- CN Assignment 1 COE-540Document5 pagesCN Assignment 1 COE-540Ghazanfar LatifNo ratings yet
- Danh sách KH Biệt Thự Thảo Điền - Quận 2Document4 pagesDanh sách KH Biệt Thự Thảo Điền - Quận 2La TraNo ratings yet
- Clinical Presentation of Ectopic Pregnancy Turned Out to Be Ectopic PregnancyDocument33 pagesClinical Presentation of Ectopic Pregnancy Turned Out to Be Ectopic PregnancyRosiNo ratings yet
- TQM 2 MARKSDocument12 pagesTQM 2 MARKSMARIYAPPANNo ratings yet
- UFD/MMC/SD Controller Flash Support Limitation and Interconnection NoteDocument5 pagesUFD/MMC/SD Controller Flash Support Limitation and Interconnection Noteمہرؤآنہ آبہرآهہيہمہNo ratings yet
- From Birth Till Palatoplasty Prosthetic.20Document5 pagesFrom Birth Till Palatoplasty Prosthetic.20Maria FernandaNo ratings yet
- Online test series analysis reportDocument17 pagesOnline test series analysis reportchetan kapoorNo ratings yet
- Quiz - Limits and ContinuityDocument3 pagesQuiz - Limits and ContinuityAdamNo ratings yet
- Irregular Verbs Multiple ChoiceDocument2 pagesIrregular Verbs Multiple Choicecloudcatching0% (1)