You might also like
- Lab Manual: ACADEMIC YEAR 2015-16Document48 pagesLab Manual: ACADEMIC YEAR 2015-16ramjiNo ratings yet
- Speed Control of Three Phase Slip Ring Induction Motor at Variable Load ConditionDocument3 pagesSpeed Control of Three Phase Slip Ring Induction Motor at Variable Load Conditionhi100% (1)
- Dcmotors and Their RepresentationDocument61 pagesDcmotors and Their RepresentationSoeprapto AtmariNo ratings yet
- Speed Control of 3phase Induction MotorDocument3 pagesSpeed Control of 3phase Induction MotorSiddhant ShatàpathyNo ratings yet
- Slip Power Recovery SchemesDocument24 pagesSlip Power Recovery SchemesMagudeeswaran MagudeeswaranNo ratings yet
- Wound Rotor Induction MotorDocument38 pagesWound Rotor Induction Motorshivamruth24983% (6)
- Induction Motor Drive Control MethodsDocument8 pagesInduction Motor Drive Control MethodsRudra Kumar MishraNo ratings yet
- ECE 8830 - Electric Drives: Topic 11: Slip-Recovery Drives For Wound-Field Induction MotorsDocument42 pagesECE 8830 - Electric Drives: Topic 11: Slip-Recovery Drives For Wound-Field Induction MotorsVikas Roy100% (1)
- Experiment 2 - Iduction Motor Drive Using Slip Power RecoveryDocument6 pagesExperiment 2 - Iduction Motor Drive Using Slip Power RecoveryDeepak BansalNo ratings yet
- DC Series Motor Speed ControlDocument38 pagesDC Series Motor Speed Controllakha ramNo ratings yet
- Suraj GahalyanDocument6 pagesSuraj GahalyanSuraj GahalyanNo ratings yet
- Steady-state performance of 3-phase induction motorDocument32 pagesSteady-state performance of 3-phase induction motorSumit SinghNo ratings yet
- Unit-Iv Rotor Side Controlled Induction Motor DriveDocument34 pagesUnit-Iv Rotor Side Controlled Induction Motor DriveChinnu ChinniNo ratings yet
- Adobe Scan 17-Oct-2023Document5 pagesAdobe Scan 17-Oct-2023mehra familyNo ratings yet
- Exp 1 N 2Document16 pagesExp 1 N 2mallikarjunbpatilNo ratings yet
- DC Shunt Motor Speed Control by Field & Armature MethodsDocument4 pagesDC Shunt Motor Speed Control by Field & Armature MethodsVaibhavNo ratings yet
- Binder 1Document48 pagesBinder 1deepanshu rajputNo ratings yet
- Kramer DriveDocument42 pagesKramer DriveSenthil Kumar100% (1)
- Anna University Practical Lab Manuals For Engineering StudentsDocument13 pagesAnna University Practical Lab Manuals For Engineering StudentsTinku RathoreNo ratings yet
- D Unit 3Document11 pagesD Unit 3Abhishek ShyamalNo ratings yet
- AC Machines ControlDocument27 pagesAC Machines ControlMohamed HadadjNo ratings yet
- Induction Motor Part-4Document34 pagesInduction Motor Part-4Jay PatelNo ratings yet
- Lect - 39 - 40 - Power Electronic Control of IM MotorsDocument18 pagesLect - 39 - 40 - Power Electronic Control of IM MotorsVishal MeghwarNo ratings yet
- Ac Servo Speed Torque Characteristics Measurement Unit - PREMIERDocument14 pagesAc Servo Speed Torque Characteristics Measurement Unit - PREMIERAAYUSH KUMARNo ratings yet
- Motor DrivesDocument61 pagesMotor DrivesSatesh NairNo ratings yet
- Experiment: Blocked Rotor Test on a 3-Phase Induction MotorDocument2 pagesExperiment: Blocked Rotor Test on a 3-Phase Induction MotorTushar GairolaNo ratings yet
- 8 3-Ph. Ind Motor Starting & Speed ControlDocument26 pages8 3-Ph. Ind Motor Starting & Speed ControlFos AlharbiNo ratings yet
- Laboratory Session 8 Squirrel Cage Induction Motor CharacteristicsDocument15 pagesLaboratory Session 8 Squirrel Cage Induction Motor CharacteristicshinsermuNo ratings yet
- The Dynamic Braking of Induction MotorsDocument9 pagesThe Dynamic Braking of Induction MotorsSúta SzalaiNo ratings yet
- Beee Unit-4 Induction & Synchronous MotorsDocument27 pagesBeee Unit-4 Induction & Synchronous MotorssrujithvedagiriNo ratings yet
- DC Motor Speed Control Lab ExperimentsDocument124 pagesDC Motor Speed Control Lab ExperimentspurushothNo ratings yet
- AED Notes SECTION CDocument8 pagesAED Notes SECTION CShivam RaiNo ratings yet
- Chapter 3-3Document19 pagesChapter 3-3Blue BerryNo ratings yet
- No-Load & Blocked Rotor TestsDocument8 pagesNo-Load & Blocked Rotor TestsmallikarjunbpatilNo ratings yet
- Scalar (V/f) Control of 3-Phase Induction MotorsDocument28 pagesScalar (V/f) Control of 3-Phase Induction MotorsDaniel DanyNo ratings yet
- National Institute of Technology, Delhi: Department of Electrical & Electronics EngineeringDocument6 pagesNational Institute of Technology, Delhi: Department of Electrical & Electronics EngineeringKomal SinghNo ratings yet
- Induction Machine-2020Document95 pagesInduction Machine-2020Bharat SinghNo ratings yet
- 9 Speed Control of DC Shunt MotorDocument4 pages9 Speed Control of DC Shunt MotormanishNo ratings yet
- 4.static Kramer Drive, Variable Frequency Variable VoltageDocument8 pages4.static Kramer Drive, Variable Frequency Variable VoltageJanani RangarajanNo ratings yet
- Three-Phase Induction MachinesDocument46 pagesThree-Phase Induction MachinesWakgari TadesaNo ratings yet
- EE 205 Lecture 34Document15 pagesEE 205 Lecture 34Akshat SharmaNo ratings yet
- VSI Fed Induction Motor Drives ExplainedDocument8 pagesVSI Fed Induction Motor Drives ExplainedVishal BhatNo ratings yet
- 7 Induction Motor BasicsDocument51 pages7 Induction Motor BasicsFos AlharbiNo ratings yet
- CYCLE-1: Experiment 5 Steady-State Performance of A DC MotorDocument6 pagesCYCLE-1: Experiment 5 Steady-State Performance of A DC MotorVIJAY KUMARNo ratings yet
- Steady-State Analysis of DC MotorsDocument24 pagesSteady-State Analysis of DC MotorsUsama RaoNo ratings yet
- Induction Motor Speed ControlDocument46 pagesInduction Motor Speed Controlsolo400060% (10)
- Single Phase Semi ConverterDocument18 pagesSingle Phase Semi Convertermohamed enanyNo ratings yet
- Speed DC MotorDocument35 pagesSpeed DC MotorDienar Adiose AljahezNo ratings yet
- Speed Control of DC Motor Using PDocument22 pagesSpeed Control of DC Motor Using PAnanth Sai YadavNo ratings yet
- AC Machine Stator Phases and Induction Motor Rotating Magnetic FieldDocument39 pagesAC Machine Stator Phases and Induction Motor Rotating Magnetic FieldSaneer M SaliNo ratings yet
- 2.2 Conventional Methods of Speed Control: Unit-Ii DC DrivesDocument47 pages2.2 Conventional Methods of Speed Control: Unit-Ii DC DrivesrajeshNo ratings yet
- Emc611s Lab 4, 2023Document9 pagesEmc611s Lab 4, 2023DimphoNo ratings yet
- Ac Drives: Reference Book: Power Electronics Devices, Circuits, and Applications by Muhammad H. RashidDocument27 pagesAc Drives: Reference Book: Power Electronics Devices, Circuits, and Applications by Muhammad H. Rashid17031 Nazmul HasanNo ratings yet
- AC Drives Guidebook: Induction and Synchronous MotorsDocument27 pagesAC Drives Guidebook: Induction and Synchronous Motors17031 Nazmul HasanNo ratings yet
- 8 - Load Test On Im1Document9 pages8 - Load Test On Im1anitha paramasivamNo ratings yet
- Em Lab 2Document22 pagesEm Lab 2abhishek kolseNo ratings yet
- DC Motor Speed ControlDocument23 pagesDC Motor Speed ControlAmit kumar singhNo ratings yet
- Electrical Machines II LAB MANUALDocument45 pagesElectrical Machines II LAB MANUALram kumarNo ratings yet
- Advanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkFrom EverandAdvanced Electric Drives: Analysis, Control, and Modeling Using MATLAB / SimulinkNo ratings yet
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2From EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No ratings yet
- 0 PDFDocument9 pages0 PDFAnonymous HUY0yRexYfNo ratings yet
- HR AnalyticsDocument89 pagesHR AnalyticsSwostik RoutNo ratings yet
- Predict Employee Churn using PythonDocument19 pagesPredict Employee Churn using PythonSwostik Rout100% (1)
- Ba Chapter 1Document11 pagesBa Chapter 1Swostik RoutNo ratings yet
- Business Analytics Assignment-2: Past, Present and Future Trends of Analytics in Education SectorDocument13 pagesBusiness Analytics Assignment-2: Past, Present and Future Trends of Analytics in Education SectorSwostik RoutNo ratings yet
- 6th ICA OpenDocument5 pages6th ICA OpendhruvrohatgiNo ratings yet
- Introduction To Inventory Management: Unit - 1Document52 pagesIntroduction To Inventory Management: Unit - 1edgarNo ratings yet
- Dell'S Move From B2C To B2B: Group No - 3Document12 pagesDell'S Move From B2C To B2B: Group No - 3Swostik RoutNo ratings yet
- Marketing AnalyticsDocument27 pagesMarketing AnalyticsSwostik RoutNo ratings yet
- B2B Marketing Assignment I: Submited By: Group 2Document7 pagesB2B Marketing Assignment I: Submited By: Group 2Swostik RoutNo ratings yet
- JSI Supply Chain Manager's Handbook Chpt.8 FinalDocument11 pagesJSI Supply Chain Manager's Handbook Chpt.8 FinalSwostik RoutNo ratings yet
- Introduction To Retail Assignment-1 ON: "Evolution of Food Retail in India"Document15 pagesIntroduction To Retail Assignment-1 ON: "Evolution of Food Retail in India"Swostik RoutNo ratings yet
- Control Satya 2 PDFDocument43 pagesControl Satya 2 PDFSwostik RoutNo ratings yet
- ChapterDocument34 pagesChapterChetan SharmaNo ratings yet
- Control Aman PDFDocument89 pagesControl Aman PDFSwostik RoutNo ratings yet
- Advanced Control - Aman 2Document58 pagesAdvanced Control - Aman 2Swostik RoutNo ratings yet
- Location Selection & Layout Planning For A New College BuildingDocument7 pagesLocation Selection & Layout Planning For A New College BuildingSwostik RoutNo ratings yet
- Introduction To Retail Assignment-1 ON: "Evolution of Food Retail in India"Document15 pagesIntroduction To Retail Assignment-1 ON: "Evolution of Food Retail in India"Swostik RoutNo ratings yet
- Electric Drives Assignment SolutionsDocument3 pagesElectric Drives Assignment SolutionsSwostik RoutNo ratings yet
- RM Assignment - Group5Document10 pagesRM Assignment - Group5Swostik RoutNo ratings yet
- Advanced Control - Shailesh PDFDocument65 pagesAdvanced Control - Shailesh PDFSwostik RoutNo ratings yet
- RM Assignment - Group5Document10 pagesRM Assignment - Group5Swostik RoutNo ratings yet
- Questionnaire To Assess Customer Satisfaction On Purchase of Mi MobilesDocument10 pagesQuestionnaire To Assess Customer Satisfaction On Purchase of Mi MobilesSwostik RoutNo ratings yet
- "Class Attendance Forecasting": Operations Management Assignment-2 ONDocument7 pages"Class Attendance Forecasting": Operations Management Assignment-2 ONSwostik RoutNo ratings yet
- "Class Attendance Forecasting": Operations Management Assignment-2 ONDocument7 pages"Class Attendance Forecasting": Operations Management Assignment-2 ONSwostik RoutNo ratings yet
- Questionnaire To Assess Customer Satisfaction On Purchase of Mi MobilesDocument10 pagesQuestionnaire To Assess Customer Satisfaction On Purchase of Mi MobilesSwostik RoutNo ratings yet
- Location Selection & Layout Planning For A New College BuildingDocument7 pagesLocation Selection & Layout Planning For A New College BuildingSwostik RoutNo ratings yet
- Location Selection & Layout Planning For A New College BuildingDocument7 pagesLocation Selection & Layout Planning For A New College BuildingSwostik RoutNo ratings yet
- Location Selection & Layout Planning For A New College BuildingDocument7 pagesLocation Selection & Layout Planning For A New College BuildingSwostik RoutNo ratings yet
- HHMPI FDS40 Operators ManualDocument61 pagesHHMPI FDS40 Operators ManualDion-Rey SumalinogNo ratings yet
- Franklin T10 Mobile HotSpot Quick Start Guide English and SpanishDocument2 pagesFranklin T10 Mobile HotSpot Quick Start Guide English and SpanishIvan SorianoNo ratings yet
- The Pentium 4 ArchitectureDocument5 pagesThe Pentium 4 ArchitectureDaniloMoceriNo ratings yet
- GSM Interview Questions and AnswersDocument11 pagesGSM Interview Questions and AnswersadnangulzarNo ratings yet
- Dr. Modar Shbat Division of Engineering Modar - Shbat@smu - CaDocument22 pagesDr. Modar Shbat Division of Engineering Modar - Shbat@smu - CaIGIHOZO HeritierNo ratings yet
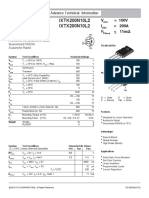
- Littelfuse Discrete MOSFETs N-Channel Linear IXT 200N10 Datasheet PDFDocument6 pagesLittelfuse Discrete MOSFETs N-Channel Linear IXT 200N10 Datasheet PDFRace Automotive ElectronicsNo ratings yet
- Tait Tm8100 Tm8200 Service ManualDocument620 pagesTait Tm8100 Tm8200 Service ManualJuan Carlos CancioNo ratings yet
- Skin EffectDocument3 pagesSkin EffectHans De Keulenaer100% (1)
- TB6560HQ/FG Preliminary TOSHIBA BiCD Integrated Circuit PWM Chopper-Type bipolar Stepping Motor Driver ICDocument31 pagesTB6560HQ/FG Preliminary TOSHIBA BiCD Integrated Circuit PWM Chopper-Type bipolar Stepping Motor Driver ICMagnetorNo ratings yet
- Visvesvaraya Technological University Belagavi-590018: Project Phase - 1 Report OnDocument13 pagesVisvesvaraya Technological University Belagavi-590018: Project Phase - 1 Report OnVinayak HegdeNo ratings yet
- Ceragon FibeAir IP-20C-HP Technical Description 10.9 ETSI Rev ADocument276 pagesCeragon FibeAir IP-20C-HP Technical Description 10.9 ETSI Rev AIbrahim MousaNo ratings yet
- Design of Helix Slow-Wave Structures For High Efficiency TwtsDocument6 pagesDesign of Helix Slow-Wave Structures For High Efficiency TwtsSaurabh MittalNo ratings yet
- Leach Routing Protocol Implementation in ns2Document38 pagesLeach Routing Protocol Implementation in ns2regragui50% (2)
- HX260Document2 pagesHX260Hoa TranNo ratings yet
- Water Level ControllerDocument24 pagesWater Level Controllernithinrmu80% (5)
- CHP592 - FOX515 Access-Transport MUXDocument2 pagesCHP592 - FOX515 Access-Transport MUXMichael Parohinog GregasNo ratings yet
- BECKHOFF New Automation Technology PLCDocument2 pagesBECKHOFF New Automation Technology PLCDaniela Maldonado VeraNo ratings yet
- Ripple Carry and Carry Lookahead Addition and Subtraction CircuitsDocument19 pagesRipple Carry and Carry Lookahead Addition and Subtraction CircuitsSurya KanthNo ratings yet
- Weintek MTV 100Document2 pagesWeintek MTV 100HafidGaneshaSecretrdreamholicNo ratings yet
- Mercedes COMAND DiagnosticDocument16 pagesMercedes COMAND DiagnosticDongwoo KwakNo ratings yet
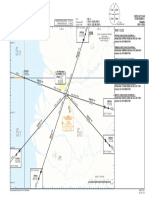
- Standard Arrival Chart for Pontianak AirportDocument1 pageStandard Arrival Chart for Pontianak AirportMarceline KNo ratings yet
- 01-09 Board CategoryDocument46 pages01-09 Board CategoryGhallab AlsadehNo ratings yet
- GPFM115 Medical: 115 Watt Global Performance SwitchersDocument3 pagesGPFM115 Medical: 115 Watt Global Performance Switchersbruno barbosaNo ratings yet
- UntitledDocument9 pagesUntitledعسم ساماNo ratings yet
- Streaming Blu-Ray Disc™ / DVD Player: Owner'S ManualDocument62 pagesStreaming Blu-Ray Disc™ / DVD Player: Owner'S ManualbenerandoNo ratings yet
- System Data: Software For Pulse™ LabshopDocument20 pagesSystem Data: Software For Pulse™ LabshopshakerNo ratings yet
- Computer Fundamentals - 15 QnADocument4 pagesComputer Fundamentals - 15 QnAKenneth LewisNo ratings yet
- 1gw - Bc547, Bc847 Series NXPDocument15 pages1gw - Bc547, Bc847 Series NXPKlebber MarchettoNo ratings yet
- Commands - For - NOKIA DX 200 O&MDocument12 pagesCommands - For - NOKIA DX 200 O&MParu YadavNo ratings yet
- Lab12-Ss-18bme (Design Iir Filters)Document7 pagesLab12-Ss-18bme (Design Iir Filters)saba rasheedNo ratings yet