You might also like
- Example Srs Document For A Project PDFDocument2 pagesExample Srs Document For A Project PDFMichele0% (1)
- Project On The Supply Chain Management in Consumer Electronic ProductsDocument32 pagesProject On The Supply Chain Management in Consumer Electronic ProductsSayari GhoshNo ratings yet
- Supply Chain ManagementDocument49 pagesSupply Chain Managementmanoj rakesh85% (47)
- A Conceptual Framework For Tackling Knowable Unknown Unknowns in Project Management 2014 Journal of Operations ManagementDocument15 pagesA Conceptual Framework For Tackling Knowable Unknown Unknowns in Project Management 2014 Journal of Operations ManagementUmang SoniNo ratings yet
- Work-Life Balance Among Women EmployeesDocument59 pagesWork-Life Balance Among Women EmployeesJessy Jas82% (11)
- POMDocument14 pagesPOMKiran ThapaNo ratings yet
- Importance of Reverse Logistics in Supply Chain ManagementDocument27 pagesImportance of Reverse Logistics in Supply Chain ManagementRenjith SdNo ratings yet
- Research Proposal Supply Chain Management Life Cycle Considerations of Supply Chain Strategies Suresh Yerra (9985337741)Document3 pagesResearch Proposal Supply Chain Management Life Cycle Considerations of Supply Chain Strategies Suresh Yerra (9985337741)Shireesha YerraNo ratings yet
- Supply Chain ManagementDocument7 pagesSupply Chain Managementklumba2027No ratings yet
- Case Study - Supply Chain Management JohDocument9 pagesCase Study - Supply Chain Management JohAzeem AhmadNo ratings yet
- Supply Chain Management in TextileDocument8 pagesSupply Chain Management in Textilemr. sharifNo ratings yet
- Supply Chain ManagementDocument15 pagesSupply Chain Managementsaif125No ratings yet
- Supply Chain Design and Analysis ModelsDocument22 pagesSupply Chain Design and Analysis ModelsM RahmanNo ratings yet
- 4-Supply Chain ManagementDocument13 pages4-Supply Chain ManagementabhishekNo ratings yet
- Evaluation of Inventory Cost in Supply Chain Using Case Based ReasoningDocument7 pagesEvaluation of Inventory Cost in Supply Chain Using Case Based ReasoningInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Reveiw of LiteratureDocument23 pagesReveiw of Literatureifrah anjumNo ratings yet
- Understanding Supply Chain RobustnessDocument6 pagesUnderstanding Supply Chain RobustnessGuilherme VieiraNo ratings yet
- Term Paper OF Operation Management (O.M) : TopicDocument15 pagesTerm Paper OF Operation Management (O.M) : TopicreyazmbaNo ratings yet
- Special Research Focus On Supply Chain LDocument16 pagesSpecial Research Focus On Supply Chain LAKSHAT GHATIANo ratings yet
- Modeling Supply Chain Dynamics: A Multiagent Approach: Jayashankar M. SwaminathanDocument26 pagesModeling Supply Chain Dynamics: A Multiagent Approach: Jayashankar M. SwaminathanalamataNo ratings yet
- Thesis Pran RFLDocument7 pagesThesis Pran RFLziniaafrin1988No ratings yet
- Paper-5 Issue-1 Full Paper 24-32 1Dr. Mohd. Rizwanullah Jan-2017Document11 pagesPaper-5 Issue-1 Full Paper 24-32 1Dr. Mohd. Rizwanullah Jan-2017sunshine4uNo ratings yet
- Supply Chain MGMT Final-105Document40 pagesSupply Chain MGMT Final-105Nilesh JetaniNo ratings yet
- Unit - 1: Supply-Chain Network Design (Edit)Document18 pagesUnit - 1: Supply-Chain Network Design (Edit)aman singhNo ratings yet
- Supply Chain Management Complete Notes - Manoj ShriwasDocument66 pagesSupply Chain Management Complete Notes - Manoj Shriwasshubham singhNo ratings yet
- Supply Chain Management FinalDocument12 pagesSupply Chain Management FinalManJyot SinghNo ratings yet
- 及时供货的SCM 英文PDF 20页Document7 pages及时供货的SCM 英文PDF 20页holahussamNo ratings yet
- What Is Supply Chain ManagementDocument3 pagesWhat Is Supply Chain ManagementozkanyilmazNo ratings yet
- Individual Assignment Muslim 2201920953Document13 pagesIndividual Assignment Muslim 2201920953Muslim Bin AfniNo ratings yet
- Supply Management NewDocument4 pagesSupply Management NewMurugan SaravananNo ratings yet
- SCM SummaryDocument47 pagesSCM SummaryEmanuelle BakuluNo ratings yet
- A Model Predictive Control Strategy For Supply Chain Optimization by Perea-Lopez (2003)Document18 pagesA Model Predictive Control Strategy For Supply Chain Optimization by Perea-Lopez (2003)jerc1324No ratings yet
- Picking Sorting Labeling Packing Loading Units Bill of LadingDocument3 pagesPicking Sorting Labeling Packing Loading Units Bill of LadingRamanRoutNo ratings yet
- WK 6 Supply ChainDocument8 pagesWK 6 Supply ChainpthavNo ratings yet
- Supply Chain ManagementDocument69 pagesSupply Chain ManagementMuhammad Qasim Jamal100% (1)
- Supply Chain Hand-Outs 1Document8 pagesSupply Chain Hand-Outs 1MarkmarilynNo ratings yet
- Information Sharing in Supply Chains: P. FialaDocument5 pagesInformation Sharing in Supply Chains: P. FialashaheerahmadNo ratings yet
- Materials ManagementDocument69 pagesMaterials ManagementproffergaryNo ratings yet
- Practical No.: 5 AIM: Case Study of Supply Chain Management (SCM)Document9 pagesPractical No.: 5 AIM: Case Study of Supply Chain Management (SCM)npbachchanitNo ratings yet
- Supply Chain MGMT Project1Document40 pagesSupply Chain MGMT Project1arvind_vandanaNo ratings yet
- Supply Chain ManagementDocument13 pagesSupply Chain Managementvimal100% (1)
- Supply Chain NotesDocument19 pagesSupply Chain NotesSayedhassan BhuiyanNo ratings yet
- Value of Information in A Serial Supply Chain Under A Nonstationary Demand Process WP 341Document18 pagesValue of Information in A Serial Supply Chain Under A Nonstationary Demand Process WP 341Nikhil KhobragadeNo ratings yet
- Rintu SeminarDocument9 pagesRintu SeminarRenjith NgNo ratings yet
- 3402 10778 3 PBDocument10 pages3402 10778 3 PBrahmatbeyNo ratings yet
- SCMDocument5 pagesSCMSenai21dragoNo ratings yet
- Enterprise Resource Planning: Mid Term SubmisionDocument12 pagesEnterprise Resource Planning: Mid Term SubmisionShruti SharmaNo ratings yet
- Optimization Modeling of A Poultry Industry Supply Chain NetworkDocument6 pagesOptimization Modeling of A Poultry Industry Supply Chain NetworkIstadewi ShansabilaNo ratings yet
- Supply Chain Management: Submitted by Rashmi Shekhar Pande ROLL NO. 09MFC016Document5 pagesSupply Chain Management: Submitted by Rashmi Shekhar Pande ROLL NO. 09MFC016Shrabani NayakNo ratings yet
- Supply Chain Management - Inventory ControlDocument67 pagesSupply Chain Management - Inventory ControlSujay ChavanNo ratings yet
- ISM Notes Part IIDocument20 pagesISM Notes Part IIGeet GoelNo ratings yet
- Supply Chain Management SummaryDocument18 pagesSupply Chain Management SummaryrangacharyNo ratings yet
- Supply Chain Principles and ApplicationsDocument12 pagesSupply Chain Principles and ApplicationsRicky KristandaNo ratings yet
- An Introduction To Supply Chain ManagementDocument5 pagesAn Introduction To Supply Chain Managementsukhbir24No ratings yet
- Unit II Introduction To Supply Chain Management (DMZ)Document15 pagesUnit II Introduction To Supply Chain Management (DMZ)ahmadmbd95No ratings yet
- Logistics and Supply Chain Management As Competitive Advantage-A StudyDocument13 pagesLogistics and Supply Chain Management As Competitive Advantage-A StudyswatikjmNo ratings yet
- Managing Demand Uncertainty in Supply Chain Planning: Anshuman Gupta, Costas D. MaranasDocument9 pagesManaging Demand Uncertainty in Supply Chain Planning: Anshuman Gupta, Costas D. MaranasparthvohraNo ratings yet
- Supply Chain ManagementDocument14 pagesSupply Chain ManagementGauravDaveNo ratings yet
- Essentials For Information Coordination in Supply Chain SystemsDocument5 pagesEssentials For Information Coordination in Supply Chain SystemsSreejith SankarNo ratings yet
- Military Supply Chain Management: From Deployment to Victory, Mastering the Logistics DanceFrom EverandMilitary Supply Chain Management: From Deployment to Victory, Mastering the Logistics DanceNo ratings yet
- Optimal Control and Optimization of Stochastic Supply Chain SystemsFrom EverandOptimal Control and Optimization of Stochastic Supply Chain SystemsNo ratings yet
- WELDER (Dual Mode) : Under Dual Training SystemDocument33 pagesWELDER (Dual Mode) : Under Dual Training SystemUmang SoniNo ratings yet
- Trade Theory - Draughtsman-SyllabusDocument6 pagesTrade Theory - Draughtsman-SyllabusUmang SoniNo ratings yet
- Trade Theory Welder-SyllabusDocument4 pagesTrade Theory Welder-SyllabusUmang SoniNo ratings yet
- Draughtsman (Mechanical)Document28 pagesDraughtsman (Mechanical)Umang SoniNo ratings yet
- Transportation Research Part E: Dong-Ping Song, Andrew Lyons, Dong Li, Hossein SharifiDocument22 pagesTransportation Research Part E: Dong-Ping Song, Andrew Lyons, Dong Li, Hossein SharifiUmang SoniNo ratings yet
- An Interdependent Layered Network Model For A Resilient Supply Chain 2014 OmegaDocument13 pagesAn Interdependent Layered Network Model For A Resilient Supply Chain 2014 OmegaUmang SoniNo ratings yet
- Syllabus For Workshop Calculation and ScienceDocument2 pagesSyllabus For Workshop Calculation and ScienceUmang SoniNo ratings yet
- A Simple Heuristic For Solving Small Fixed Charge Transportation Problems 2003 OmegaDocument7 pagesA Simple Heuristic For Solving Small Fixed Charge Transportation Problems 2003 OmegaUmang SoniNo ratings yet
- Escalator's Arrangement 1. A Single Escalator Arrangement: August 2016 SemesterDocument10 pagesEscalator's Arrangement 1. A Single Escalator Arrangement: August 2016 SemesterUmang SoniNo ratings yet
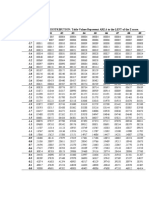
- STANDARD NORMAL DISTRIBUTION: Table Values Represent AREA To The LEFT of The Z ScoreDocument2 pagesSTANDARD NORMAL DISTRIBUTION: Table Values Represent AREA To The LEFT of The Z ScoreUmang SoniNo ratings yet
- Expert Systems With Applications: Ming-Lang TsengDocument11 pagesExpert Systems With Applications: Ming-Lang TsengUmang SoniNo ratings yet
- Omega: Pui-Sze Chow, Yulan Wang, Tsan-Ming Choi, Bin ShenDocument13 pagesOmega: Pui-Sze Chow, Yulan Wang, Tsan-Ming Choi, Bin ShenUmang SoniNo ratings yet
- A Heuristic Framework For The Bi Objective Enhanced Index Tracking Problem 2016 OmegaDocument16 pagesA Heuristic Framework For The Bi Objective Enhanced Index Tracking Problem 2016 OmegaUmang SoniNo ratings yet
- A Delay in Payment Contract For Pareto Improvement of A Supply Chain With Stochastic Demand 2014 OmegaDocument9 pagesA Delay in Payment Contract For Pareto Improvement of A Supply Chain With Stochastic Demand 2014 OmegaUmang SoniNo ratings yet
- An Improved Heuristic For The Single Machine Weighted Tardiness Problem 1999 OmegaDocument11 pagesAn Improved Heuristic For The Single Machine Weighted Tardiness Problem 1999 OmegaUmang SoniNo ratings yet
- A Competitive Advantage From The Implementation Timing of ISO Management Standards 2015 Journal of Operations ManagementDocument14 pagesA Competitive Advantage From The Implementation Timing of ISO Management Standards 2015 Journal of Operations ManagementUmang SoniNo ratings yet
- REVISED Winter 2023 Dinner Menu 11x17Document2 pagesREVISED Winter 2023 Dinner Menu 11x17Syed RuksarNo ratings yet
- Definition and Scope of Gis: Geographic DataDocument18 pagesDefinition and Scope of Gis: Geographic DataKhan HarisNo ratings yet
- Carlene G Marable Resume2015Document3 pagesCarlene G Marable Resume2015api-279976771No ratings yet
- " Efforts" - "Reasonable - CanadaDocument5 pages" Efforts" - "Reasonable - CanadaAjay DevNo ratings yet
- Quality Procedure: Liquid Penetrant TestingDocument9 pagesQuality Procedure: Liquid Penetrant TestingvsnaiduqcNo ratings yet
- Ellipse Technical OverviewDocument33 pagesEllipse Technical OverviewAlejandro MartínezNo ratings yet
- Unit 1-5 NEP (UNDERSTANDING POLITICAL THEORY)Document78 pagesUnit 1-5 NEP (UNDERSTANDING POLITICAL THEORY)GAGAN ANAND100% (1)
- Problems On Bode PlotDocument5 pagesProblems On Bode PlotAnkit Kumar AJ0% (1)
- Hettich Mikro 185 Service ManualDocument68 pagesHettich Mikro 185 Service Manualtph_jamesNo ratings yet
- Chapter Five: Is Everything Suffering?Document2 pagesChapter Five: Is Everything Suffering?Lauren DiMartinoNo ratings yet
- Self Assess Comp RhetoricDocument2 pagesSelf Assess Comp Rhetoricapi-535588010No ratings yet
- NURS FPX 6414 Assessment 3 Tool Kit For BioinformaticsDocument6 pagesNURS FPX 6414 Assessment 3 Tool Kit For Bioinformaticsfarwaamjad771No ratings yet
- Coulter, 2014 Strength-Based For Trauma YoungstersDocument18 pagesCoulter, 2014 Strength-Based For Trauma YoungstersLorena LeylerNo ratings yet
- Contract and Its Application On TaDocument3 pagesContract and Its Application On TasathishsayeeNo ratings yet
- KindorfDocument160 pagesKindorfrlgaloNo ratings yet
- Pe Endorsement For Design of New FCC and Guard House BuildingDocument7 pagesPe Endorsement For Design of New FCC and Guard House Buildingjasekan.dcNo ratings yet
- Opportunities and Barriers For Producing High Quality Fuels From The Pyrolysis of Scrap TiresDocument15 pagesOpportunities and Barriers For Producing High Quality Fuels From The Pyrolysis of Scrap TiresAbdisalamNo ratings yet
- BeanFX Iyanu Strategy - FX Traders BlogDocument20 pagesBeanFX Iyanu Strategy - FX Traders BlogPagalavanNo ratings yet
- Reliability Engineering: Fred SchenkelbergDocument29 pagesReliability Engineering: Fred SchenkelbergKristian Marlowe OleNo ratings yet
- RXII Series User ManualDocument220 pagesRXII Series User ManualDavid DuarteNo ratings yet
- Emona Communications Board - Dxiq-45G: Product ApplicationDocument2 pagesEmona Communications Board - Dxiq-45G: Product ApplicationtomichelNo ratings yet
- The Derveni Papyrus: An Interim TextDocument63 pagesThe Derveni Papyrus: An Interim TextРужа ПоповаNo ratings yet
- Written Activity For The Asynchronous SessionDocument11 pagesWritten Activity For The Asynchronous SessionArnie Juliene AbogadoNo ratings yet
- ADHD2Document13 pagesADHD2Caren AntonioNo ratings yet
- Lesson Plan Grade 1Document4 pagesLesson Plan Grade 1Nhuquyen NguyenNo ratings yet
- Case StudyDocument22 pagesCase StudyAru Verma0% (1)
- Uts PDFDocument27 pagesUts PDFVictoria DegorioNo ratings yet