You might also like
- 10 1109@tmag 2006 871637Document4 pages10 1109@tmag 2006 871637raisaNo ratings yet
- IEEE Optimal SlotDocument7 pagesIEEE Optimal Slotvenkanna.aNo ratings yet
- Gojko Joksimovic 503 PDFDocument5 pagesGojko Joksimovic 503 PDFjalilemadiNo ratings yet
- Differential Leakage Reactance in IMDocument5 pagesDifferential Leakage Reactance in IMjalilemadiNo ratings yet
- The Dynamic Braking of Induction MotorsDocument9 pagesThe Dynamic Braking of Induction MotorsSúta SzalaiNo ratings yet
- Oscillatory Synchronous Linear Motor With Permanent-Magnet ExcitationDocument5 pagesOscillatory Synchronous Linear Motor With Permanent-Magnet ExcitationJon JonNo ratings yet
- A_low-phase-noise_5-GHz_CMOS_quadrature_VCO_using_superharmonic_couplingDocument7 pagesA_low-phase-noise_5-GHz_CMOS_quadrature_VCO_using_superharmonic_couplingSai GaganNo ratings yet
- 2 - Brief - Review - of - Motor - Current - Signature - Analysis TESIS PDFDocument13 pages2 - Brief - Review - of - Motor - Current - Signature - Analysis TESIS PDFLuis MonzonNo ratings yet
- 2 Brief Review of Motor Current Signature Analysis PDFDocument12 pages2 Brief Review of Motor Current Signature Analysis PDFKarthik EvilordNo ratings yet
- A I RS: David G. Dorrell, William ThomsonDocument11 pagesA I RS: David G. Dorrell, William ThomsonEng Bagaragaza RomualdNo ratings yet
- Analysis and Reduction of Time Harmonic Rotor Loss in Solid-Rotor Synchronous Reluctance DriveDocument8 pagesAnalysis and Reduction of Time Harmonic Rotor Loss in Solid-Rotor Synchronous Reluctance DrivemitsuiNo ratings yet
- Ion Boldea, Fields, Forces, and Performance Equations ofDocument10 pagesIon Boldea, Fields, Forces, and Performance Equations oftorinomgNo ratings yet
- Analysis and Test Results of A Brushless Doubly Fed Induction Machine With Rotary TransformerDocument8 pagesAnalysis and Test Results of A Brushless Doubly Fed Induction Machine With Rotary TransformerHuong ThaoNo ratings yet
- 12 Nilaykumar PatelDocument7 pages12 Nilaykumar Patelmohammed dawNo ratings yet
- Icelmach 2008 4800163Document4 pagesIcelmach 2008 4800163nevesunipampaNo ratings yet
- Electrical Machine PracticalDocument11 pagesElectrical Machine PracticalOyetayo Muhammad Jamiu olamideNo ratings yet
- Rotor 6Document6 pagesRotor 6kais alviNo ratings yet
- Ger 3183Document14 pagesGer 3183rizwanNo ratings yet
- Electronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 3From EverandElectronic Devices and Circuits: The Commonwealth and International Library: Electrical Engineering Division, Volume 3Rating: 3 out of 5 stars3/5 (2)
- A Novel Axial Flux Permanent-Magnet Machine For Flywheel Energy Storage System - Design and AnalysisDocument11 pagesA Novel Axial Flux Permanent-Magnet Machine For Flywheel Energy Storage System - Design and AnalysisedumacerenNo ratings yet
- Vibroacoustic Diagnostics of Power Transformers in A Steady and Transient StateDocument6 pagesVibroacoustic Diagnostics of Power Transformers in A Steady and Transient StateAHMED ALSHAMMARINo ratings yet
- Wind TurbineDocument22 pagesWind TurbinesuryatejaNo ratings yet
- Subsynchronous Resonance Analysis IEEE First Benchmark ModelDocument4 pagesSubsynchronous Resonance Analysis IEEE First Benchmark ModelBhavik PrajapatiNo ratings yet
- Sciencedirect: An Ideal Mems Parametric Resonator Using A Tapered Comb-DriveDocument4 pagesSciencedirect: An Ideal Mems Parametric Resonator Using A Tapered Comb-DriveAgusAprilyansahNo ratings yet
- Stator and Rotor Inductances in Salient Pole Synchronous GeneratorDocument7 pagesStator and Rotor Inductances in Salient Pole Synchronous GeneratormssmsNo ratings yet
- Partial Discharge Measurement and Monitoring On Rotating MachineDocument5 pagesPartial Discharge Measurement and Monitoring On Rotating MachineWagdy KhaterNo ratings yet
- Acoustic Wave Sensors: Theory, Design and Physico-Chemical ApplicationsFrom EverandAcoustic Wave Sensors: Theory, Design and Physico-Chemical ApplicationsNo ratings yet
- Faults and Unbalance Forces in The Switched Reluctance Machine PDFDocument11 pagesFaults and Unbalance Forces in The Switched Reluctance Machine PDFIvan VazdarNo ratings yet
- Janda2014 PDFDocument4 pagesJanda2014 PDFFahmi Syawali RizkyNo ratings yet
- Prediction of Noise Generated by Electromagnetic Forces in Induction MotorsDocument5 pagesPrediction of Noise Generated by Electromagnetic Forces in Induction Motors434lapNo ratings yet
- BlauDocument6 pagesBlauhappyworryNo ratings yet
- NMR SpectrosDocument66 pagesNMR SpectrosDushyant Patel100% (1)
- Piezoelectric Ultrasonic Motors OverviewDocument14 pagesPiezoelectric Ultrasonic Motors Overviewsai krishna pothuNo ratings yet
- Research Paper of OscillatorsDocument10 pagesResearch Paper of OscillatorsRam MNo ratings yet
- Fallas en DiodosDocument8 pagesFallas en DiodosJorge Andres Ledesma RestrepoNo ratings yet
- Design A Crystal Oscillator To Match Your ApplicationDocument16 pagesDesign A Crystal Oscillator To Match Your Applicationwrite2arshad_mNo ratings yet
- Ahc - Paper - Aberrant Amplification of Torsional Oscillating Torques...Document4 pagesAhc - Paper - Aberrant Amplification of Torsional Oscillating Torques...Md AsaduzzamanNo ratings yet
- NARAYANA ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERINGDocument6 pagesNARAYANA ENGINEERING COLLEGE DEPARTMENT OF ELECTRICAL & ELECTRONICS ENGINEERINGSaravanan T YNo ratings yet
- (2011) Experiment M: 1. AimsDocument9 pages(2011) Experiment M: 1. AimsIbrahim ShaibuNo ratings yet
- Code KARAT in Simulations of Power Microwave SourcDocument2 pagesCode KARAT in Simulations of Power Microwave SourcGiacomoMiglioreNo ratings yet
- Variable Pulse Width Piezoelectric Ultrasonic TR PDFDocument5 pagesVariable Pulse Width Piezoelectric Ultrasonic TR PDFMoriartyNo ratings yet
- The Author Also Holds An Appointment As Affiliated Pro-Fessor of Physics at Montana State University, BozemanDocument6 pagesThe Author Also Holds An Appointment As Affiliated Pro-Fessor of Physics at Montana State University, BozemanVignesh RamakrishnanNo ratings yet
- DK1913 CH04Document28 pagesDK1913 CH04Maniraj PerumalNo ratings yet
- Hysteresis Band Determination of Direct Torque Controlled InductDocument5 pagesHysteresis Band Determination of Direct Torque Controlled InductAman HariNo ratings yet
- A Study of Oscillator Jitter Due To Supply and Substrate NoiseDocument7 pagesA Study of Oscillator Jitter Due To Supply and Substrate Noisesm123ts456No ratings yet
- Ferrite Circulator SwitchesDocument2 pagesFerrite Circulator SwitchesAmit KumarNo ratings yet
- Introduction To The Quartz Tuning ForkDocument9 pagesIntroduction To The Quartz Tuning ForkLuã Coimbra Santiago SaundersNo ratings yet
- Split 8984034026561120893Document7 pagesSplit 8984034026561120893Donya PangilNo ratings yet
- Kiani, M., Lee, W.-J., Kenarangui, R., & Fahimi, B. (2007) - Detection of Rotor Faults in Synchronous GeneratorsDocument6 pagesKiani, M., Lee, W.-J., Kenarangui, R., & Fahimi, B. (2007) - Detection of Rotor Faults in Synchronous GeneratorsjuanNo ratings yet
- ABCsof Vibration TransducersDocument4 pagesABCsof Vibration Transducersambresh.09No ratings yet
- Inductances LD LQ Reluctance: The and MachinesDocument7 pagesInductances LD LQ Reluctance: The and MachinesHERNAN ALONSO BRAVO URREANo ratings yet
- Servo Control Basics: Understanding Motion Control FundamentalsDocument24 pagesServo Control Basics: Understanding Motion Control FundamentalssybaritzNo ratings yet
- Paper 8 - Additional Losses - Damper Winding - Hydrogenerators at Open-Circuit and Load Conditions - Traxler-SamekDocument7 pagesPaper 8 - Additional Losses - Damper Winding - Hydrogenerators at Open-Circuit and Load Conditions - Traxler-SamekNicolás NielsenNo ratings yet
- ScienceDocument2 pagesScienceMike PoznerNo ratings yet
- Diagnosis of Stator Faults in Induction Motor Based On Zero Sequence Voltage After Switch-OffDocument8 pagesDiagnosis of Stator Faults in Induction Motor Based On Zero Sequence Voltage After Switch-OffAbdul AsifNo ratings yet
- Artigo Osc. Sub.Document15 pagesArtigo Osc. Sub.Thayane SkorupaNo ratings yet
- Assessing Non-Stationary Power Quality Phenomena of Induction MotorsDocument4 pagesAssessing Non-Stationary Power Quality Phenomena of Induction MotorsДинка ИвановаNo ratings yet
- PN 309 DaveyDocument4 pagesPN 309 DaveySina MehrabafiNo ratings yet
- An Introduction To Permanent-Magnet Gearless Motors and Drive Control SystemsDocument8 pagesAn Introduction To Permanent-Magnet Gearless Motors and Drive Control SystemsTaufikNo ratings yet
- en Harmonic Reduction in Variable FrequencyDocument8 pagesen Harmonic Reduction in Variable FrequencyTaufikNo ratings yet
- Energies: Design For The Interior Permanent Magnet Synchronous Motor Drive System Based On The Z-Source InverterDocument14 pagesEnergies: Design For The Interior Permanent Magnet Synchronous Motor Drive System Based On The Z-Source InverterTaufikNo ratings yet
- Energies: A Simple Method For Reducing THD and Improving The Efficiency in Csi Topology Based On Sic Power DevicesDocument23 pagesEnergies: A Simple Method For Reducing THD and Improving The Efficiency in Csi Topology Based On Sic Power DevicesTaufikNo ratings yet
- Harmonic Reduction in Adjustable-Speed S PDFDocument7 pagesHarmonic Reduction in Adjustable-Speed S PDFTaufikNo ratings yet
- A Guide To Supply Harmonics and Other Low Frequency Disturbances Iss2x 0704 0002 02x PDFDocument32 pagesA Guide To Supply Harmonics and Other Low Frequency Disturbances Iss2x 0704 0002 02x PDFRichie ChicolNo ratings yet
- Advanced Synchronous Machine Modeling PDFDocument130 pagesAdvanced Synchronous Machine Modeling PDFTaufikNo ratings yet
- University of Nairobi: Project Report Submitted in Partial Fulfillment of The Requirement For The Award of The Degree ofDocument45 pagesUniversity of Nairobi: Project Report Submitted in Partial Fulfillment of The Requirement For The Award of The Degree ofVishnuNo ratings yet
- RESEARCH TO STUDY VARIABLE FREQUENCY DRIVE AND ITS ENERGY SAVINGs PDFDocument77 pagesRESEARCH TO STUDY VARIABLE FREQUENCY DRIVE AND ITS ENERGY SAVINGs PDFMohammad QureshiNo ratings yet
- Winkens Et Al 2009Document8 pagesWinkens Et Al 2009Marta SanchezNo ratings yet
- English Extra Conversation Club International Women's DayDocument2 pagesEnglish Extra Conversation Club International Women's Dayevagloria11No ratings yet
- Design & Construction of Substation 16P Painting System ComplianceDocument103 pagesDesign & Construction of Substation 16P Painting System ComplianceRamil LazNo ratings yet
- Load Frequency Control of Hydro and Nuclear Power System by PI & GA ControllerDocument6 pagesLoad Frequency Control of Hydro and Nuclear Power System by PI & GA Controllerijsret100% (1)
- 5 Guys Nutrition InfoDocument1 page5 Guys Nutrition InfoJody Ike LinerNo ratings yet
- Masterbatch Buyers Guide PDFDocument8 pagesMasterbatch Buyers Guide PDFgurver55No ratings yet
- PedigreesDocument5 pagesPedigreestpn72hjg88No ratings yet
- List of household items for relocationDocument4 pagesList of household items for relocationMADDYNo ratings yet
- Themes in Romeo and JulietDocument7 pagesThemes in Romeo and JulietChiosa AdinaNo ratings yet
- Handbook of Zen, Mindfulness and Spiritual Health PDFDocument324 pagesHandbook of Zen, Mindfulness and Spiritual Health PDFMatthew Grayson100% (3)
- Boala Cronica Obstructive: BpocDocument21 pagesBoala Cronica Obstructive: BpocNicoleta IliescuNo ratings yet
- Smart EE June 2022 - PackageDocument19 pagesSmart EE June 2022 - PackageMercy FeNo ratings yet
- Monster Visual Discrimination CardsDocument9 pagesMonster Visual Discrimination CardsLanaNo ratings yet
- WEEK 8. - Gen Math-PortfolioDocument12 pagesWEEK 8. - Gen Math-PortfolioOreo ProductionsNo ratings yet
- 13Document47 pages13Rohan TirmakheNo ratings yet
- J Ipm 2019 102121Document17 pagesJ Ipm 2019 102121bilalNo ratings yet
- 03 - 42 STCP-Ahm AssetDocument46 pages03 - 42 STCP-Ahm AssetARP MEILNo ratings yet
- ChromosomesDocument24 pagesChromosomesapi-249102379No ratings yet
- School of Public Health: Haramaya University, ChmsDocument40 pagesSchool of Public Health: Haramaya University, ChmsRida Awwal100% (1)
- PediculosisDocument14 pagesPediculosisREYMARK HACOSTA100% (1)
- DLL Grade7 First 1solutions ConcentrationDocument5 pagesDLL Grade7 First 1solutions ConcentrationJaneth de JuanNo ratings yet
- Serv7107 V05N01 TXT7Document32 pagesServ7107 V05N01 TXT7azry_alqadry100% (6)
- DNA Affirmative - MSDI 2015Document146 pagesDNA Affirmative - MSDI 2015Michael TangNo ratings yet
- CP Mother's Day Lesson PlanDocument2 pagesCP Mother's Day Lesson PlanAma MiriNo ratings yet
- ClientsDocument7 pagesClientsLiane PanahacNo ratings yet
- Characteristics and Guidelines of PublicspaceDocument3 pagesCharacteristics and Guidelines of PublicspaceJanani SurenderNo ratings yet
- Durand Et Al JHRC 1997 Experimental Design Optimization of The Analysis of Gasoline by Capillary Gas ChromatographyDocument6 pagesDurand Et Al JHRC 1997 Experimental Design Optimization of The Analysis of Gasoline by Capillary Gas ChromatographyCatalinaSalamancaNo ratings yet
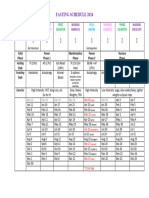
- Moon Fast Schedule 2024Document1 pageMoon Fast Schedule 2024mimiemendoza18No ratings yet
- Appendix 1 Application FormDocument13 pagesAppendix 1 Application FormSharifahrodiah SemaunNo ratings yet
- MECHANICAL PROPERTIES OF SOLIDSDocument39 pagesMECHANICAL PROPERTIES OF SOLIDSAbdul Musavir100% (1)