You might also like
- Beams and Framed Structures: Structures and Solid Body MechanicsFrom EverandBeams and Framed Structures: Structures and Solid Body MechanicsRating: 3 out of 5 stars3/5 (2)
- TSR HingeDocument14 pagesTSR HingeBandi SaiNo ratings yet
- Term Work - Assignement 7Document3 pagesTerm Work - Assignement 7Rahul ManeNo ratings yet
- General Universal Joint Characteristics and Applications From SDP - SIDocument9 pagesGeneral Universal Joint Characteristics and Applications From SDP - SIJigneshNo ratings yet
- IM Torque Spee CharacteristicsDocument21 pagesIM Torque Spee CharacteristicsAnas SheikhNo ratings yet
- Shaft Misalignment and Vibration - A ModelDocument13 pagesShaft Misalignment and Vibration - A ModelPeak NeoNo ratings yet
- 1.9 Forces Acting On A Rail Vehicle System: 1. Constraint Forces Between W/RDocument35 pages1.9 Forces Acting On A Rail Vehicle System: 1. Constraint Forces Between W/RAbel TeclayNo ratings yet
- Elements of Mechanical Design: SYEN4399. FIRST in EngineeringDocument27 pagesElements of Mechanical Design: SYEN4399. FIRST in EngineeringYash GandhiNo ratings yet
- CH # 1 Design of ShaftsDocument45 pagesCH # 1 Design of ShaftsWaris Ali BozdarNo ratings yet
- Ratchet Mechanisms For High-Speed Transmissions: V. P. BondaletovDocument4 pagesRatchet Mechanisms For High-Speed Transmissions: V. P. Bondaletovsatheeshsep24No ratings yet
- Chapter 7 Torsion Lecture NotesDocument31 pagesChapter 7 Torsion Lecture NotesJeremiah SoonNo ratings yet
- Prediction and Analysis of Gear Rattle: Development TransmissionsDocument5 pagesPrediction and Analysis of Gear Rattle: Development TransmissionssmsnvhNo ratings yet
- Whirl WhipDocument6 pagesWhirl WhipoashourNo ratings yet
- Dynamic Analysis of Gear and Rack Transmission SysDocument6 pagesDynamic Analysis of Gear and Rack Transmission SysEverest Engineering Lead R&DNo ratings yet
- Sensitivity Analysis Study of CVT Parameters Using Mathematical ModelDocument6 pagesSensitivity Analysis Study of CVT Parameters Using Mathematical ModelSurajSj100% (1)
- CB Selecting The Proper Conveyor BeltDocument18 pagesCB Selecting The Proper Conveyor BeltdineshNo ratings yet
- Cone Crusher in The Cylindrical Roller Bearing Contact Analysis Zhou Zhang, Shuisheng Chen, Yi YangDocument5 pagesCone Crusher in The Cylindrical Roller Bearing Contact Analysis Zhou Zhang, Shuisheng Chen, Yi Yangham niNo ratings yet
- Sae Sis03 NarDocument6 pagesSae Sis03 Narsuraj dhulannavarNo ratings yet
- Dynamic Load Sharing For Conveyor Belts With Multiple Drive StatDocument14 pagesDynamic Load Sharing For Conveyor Belts With Multiple Drive StatGuilherme Henrique Leite VianaNo ratings yet
- Arche2 Module 3Document13 pagesArche2 Module 3Justine MonteroNo ratings yet
- Dynamic Characteristics of A Exible Bladed-Rotor With Coulomb Damping Dueto Tip-RubDocument45 pagesDynamic Characteristics of A Exible Bladed-Rotor With Coulomb Damping Dueto Tip-RubSandeep186No ratings yet
- Experimental Investigation On The Effici PDFDocument5 pagesExperimental Investigation On The Effici PDFswapnil pandeNo ratings yet
- Chain-Spracket DriveDocument13 pagesChain-Spracket Drivebasavaraj biradarNo ratings yet
- SDP-SI - Junta UniversalDocument8 pagesSDP-SI - Junta UniversalAndré Cristiano SouzaNo ratings yet
- Condition Monitoring of A Cycloid GearboxDocument5 pagesCondition Monitoring of A Cycloid GearboxEric BechhoeferNo ratings yet
- Unit 14Document58 pagesUnit 14Parul SinghNo ratings yet
- Fluid-Induced InstabilityDocument22 pagesFluid-Induced Instabilityadolfo cantilloNo ratings yet
- Nice Paper On Rotor DynamicsDocument23 pagesNice Paper On Rotor Dynamicsfosroc1878580% (5)
- Gear WhineDocument12 pagesGear WhineZhengNo ratings yet
- Aerospace Science and Technology: Mingjie Zhang, Jiangang YangDocument13 pagesAerospace Science and Technology: Mingjie Zhang, Jiangang YangSebastian LopezNo ratings yet
- Unit 3 56Document72 pagesUnit 3 56fdsfsdfsdfsfsNo ratings yet
- Ch-5 Toothed Gears - 1Document40 pagesCh-5 Toothed Gears - 1Samar GuptaNo ratings yet
- Chapter 1 Belt Drive SystemDocument44 pagesChapter 1 Belt Drive Systemshazwani zamriNo ratings yet
- Design of ClutchesDocument37 pagesDesign of ClutchesRintu MazumderNo ratings yet
- En AVT 207 10 High Cyclic FatigueDocument54 pagesEn AVT 207 10 High Cyclic Fatiguemaurizio.desio4992No ratings yet
- Dynamics ReportDocument18 pagesDynamics Reportvalentinembajiogu2020No ratings yet
- LN Belt DriveDocument45 pagesLN Belt DriveDesri AfrilianiNo ratings yet
- MECH 260-102 Assignment 5 SolutionDocument8 pagesMECH 260-102 Assignment 5 Solutionsalvadorsilveyra@hotmail.comNo ratings yet
- Brush Tire ModelDocument7 pagesBrush Tire ModelznamNo ratings yet
- U N I T 8 B e L T, C H A I N, G e A R S A N D L A W o F G e A R I N G 8 - 1 I N T R o D U C T I o NDocument42 pagesU N I T 8 B e L T, C H A I N, G e A R S A N D L A W o F G e A R I N G 8 - 1 I N T R o D U C T I o Namit_kushwah1No ratings yet
- Reporte EngranesDocument10 pagesReporte EngranesOscar SaldivarNo ratings yet
- Design and Analysis Trends of Helicopter Rotor SystemsDocument40 pagesDesign and Analysis Trends of Helicopter Rotor SystemsHasan ÖzgenNo ratings yet
- Analysis and Simulation of Contact Stress Model For Elastic Wheels On Road SurfaceDocument8 pagesAnalysis and Simulation of Contact Stress Model For Elastic Wheels On Road SurfaceafshinNo ratings yet
- Idea - Wheel CalculationDocument35 pagesIdea - Wheel Calculationbambang satryojatiNo ratings yet
- Gearboxes Design Guide PDFDocument26 pagesGearboxes Design Guide PDFDracoRodriguezNo ratings yet
- Gearboxes: Motion Design GuideDocument26 pagesGearboxes: Motion Design GuideMohana Rao VabbilireddiNo ratings yet
- Rotor Dynamics 1Document14 pagesRotor Dynamics 1Marco NeveNo ratings yet
- NTN TR75 en P053Document9 pagesNTN TR75 en P053hollabackcockNo ratings yet
- Mechanisms Geneva: How To DesignDocument5 pagesMechanisms Geneva: How To DesignAseel JameelNo ratings yet
- Bull - Dings: en >Document9 pagesBull - Dings: en >Jose MenaNo ratings yet
- Vibration Transmission Through Rolling Element Bearings, Part I Bearing StiffnessDocument21 pagesVibration Transmission Through Rolling Element Bearings, Part I Bearing StiffnessApoorvaNo ratings yet
- Rahnejat Gohar DesignofprofiledtaperrollerbearingDocument8 pagesRahnejat Gohar DesignofprofiledtaperrollerbearingAakashAbhaniNo ratings yet
- Stress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionFrom EverandStress Analysis Problems in S.I. Units: The Commonwealth and International Library: Mechanical Engineering DivisionRating: 2.5 out of 5 stars2.5/5 (4)
- Study of a reluctance magnetic gearbox for energy storage system applicationFrom EverandStudy of a reluctance magnetic gearbox for energy storage system applicationRating: 1 out of 5 stars1/5 (1)
- A320 Worksheets 2017-18Document49 pagesA320 Worksheets 2017-18Being AirWindNo ratings yet
- Gruas Grove RT 530E Especificaciones TecnicasDocument12 pagesGruas Grove RT 530E Especificaciones TecnicasAlejandro LealNo ratings yet
- Automotive ScriptDocument3 pagesAutomotive ScriptShi GiananNo ratings yet
- GUIDsDocument2 pagesGUIDsJose MorenoNo ratings yet
- xg3834400005 - 0001 - Generato.2 m9 c6s - 4 - Datenblatt - DB - enDocument7 pagesxg3834400005 - 0001 - Generato.2 m9 c6s - 4 - Datenblatt - DB - enAM76No ratings yet
- Suzuki Jimny 4WD SystemDocument29 pagesSuzuki Jimny 4WD SystemRuben Michel67% (9)
- Coates Pump ManualDocument17 pagesCoates Pump ManualFergiKalesaranNo ratings yet
- Case 521e Tier3 - enDocument846 pagesCase 521e Tier3 - enRUBEN RINCONNo ratings yet
- 2002 Lancia Thesis 2.0 TurboDocument5 pages2002 Lancia Thesis 2.0 TurboCassie Romero100% (2)
- Science and Technology and Their Effect On Society and The EnvironmentDocument9 pagesScience and Technology and Their Effect On Society and The EnvironmentMary Joyce De La CruzNo ratings yet
- TATA Motors Labour Schedule 2021Document6 pagesTATA Motors Labour Schedule 2021Vel Murugan100% (4)
- TASK 71-00-00-811-831-A Low EPR N2 High - N2 To Governing Speed Before Rated EPR N1 Fuel Flow LowDocument1 pageTASK 71-00-00-811-831-A Low EPR N2 High - N2 To Governing Speed Before Rated EPR N1 Fuel Flow LowWidya DamayantiNo ratings yet
- Manual Atlas Copco Xas136Document38 pagesManual Atlas Copco Xas136Tamer Elsebaei EbarhimNo ratings yet
- 992G E-SchematicDocument6 pages992G E-SchematicThein Htoon lwinNo ratings yet
- 12 Products Catalogue enDocument12 pages12 Products Catalogue enmasakpNo ratings yet
- Isq IomDocument19 pagesIsq IomJericho EstrellaNo ratings yet
- Instrucciones de Intalacion PA1200Document34 pagesInstrucciones de Intalacion PA1200teopol2No ratings yet
- Valve Body Identification Guide Valve Body Identifi Cation GuideDocument11 pagesValve Body Identification Guide Valve Body Identifi Cation GuideUlloaEliasNo ratings yet
- TQM Case Study GM Motor WorksDocument6 pagesTQM Case Study GM Motor WorksGladys RanaraNo ratings yet
- Service Schedules: Routine MaintenanceDocument10 pagesService Schedules: Routine MaintenanceDaniel AguirreNo ratings yet
- Cargador 992KDocument307 pagesCargador 992KEder Milanez100% (1)
- Spesifikasi: Gemmy Industrial Corp., TaiwanDocument2 pagesSpesifikasi: Gemmy Industrial Corp., TaiwanPengen TahuNo ratings yet
- TABEL EQUIVALENT Chart Oli-OliDocument1 pageTABEL EQUIVALENT Chart Oli-OliZainal L SijaNo ratings yet
- Course No. AENG - 251 (1+1) : Farm Machinery and PowerDocument27 pagesCourse No. AENG - 251 (1+1) : Farm Machinery and PowerGundeboyina Sai TejaNo ratings yet
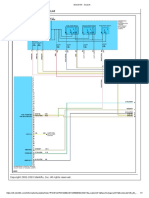
- Diagram 1 Auto Shut Down RelayDocument1 pageDiagram 1 Auto Shut Down RelayEnrique Arevalo LeyvaNo ratings yet
- Replacing Steering Rack 993Document9 pagesReplacing Steering Rack 993Robertus BswhNo ratings yet
- Hitachi Zx350lch 5gDocument24 pagesHitachi Zx350lch 5gTiago AlvesNo ratings yet
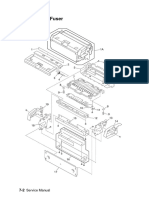
- Assembly 1: Fuser: Service ManualDocument83 pagesAssembly 1: Fuser: Service ManualSara MNo ratings yet
- Automotive Tools & Equipment: Catalog #4Document68 pagesAutomotive Tools & Equipment: Catalog #4Ptryzzia Aunne100% (1)
- x70 Plus LuxuryDocument13 pagesx70 Plus Luxurydanilo lekicNo ratings yet