You might also like
- Analysis of Load Flow and Short Circuit Studies of An Offshore Platform Using ERACS SoftwareDocument6 pagesAnalysis of Load Flow and Short Circuit Studies of An Offshore Platform Using ERACS Softwarefateh oualiNo ratings yet
- Facts Main Title PDFDocument5 pagesFacts Main Title PDFanilNo ratings yet
- Topic: Islanding DetectionDocument11 pagesTopic: Islanding DetectionRatik MittalNo ratings yet
- Mathematical Modelling of Engineering Problems: Received: 11 February 2019 Accepted: 3 June 2019Document9 pagesMathematical Modelling of Engineering Problems: Received: 11 February 2019 Accepted: 3 June 2019Shiv TripathiNo ratings yet
- 2001 - Multiloop ControlDocument9 pages2001 - Multiloop ControlPradeep Kumar SahuNo ratings yet
- A Project Report On "Modelling of Fact Device For Power Flow Analysis"Document45 pagesA Project Report On "Modelling of Fact Device For Power Flow Analysis"gopalchandramahatoNo ratings yet
- PLC Based Motor Power Factor ControllerDocument7 pagesPLC Based Motor Power Factor ControllerLaiba GulNo ratings yet
- Analysis of Power System Stability of A Hybrid Microgrid For On-Grid and Off-Grid Operation by Using ETAP SoftwareDocument8 pagesAnalysis of Power System Stability of A Hybrid Microgrid For On-Grid and Off-Grid Operation by Using ETAP SoftwareBăng BăngNo ratings yet
- Solar Charge Controller With A Data Acquisition System Based On ArduinoDocument9 pagesSolar Charge Controller With A Data Acquisition System Based On ArduinoolumideNo ratings yet
- Implementation and Performance Evaluation of A Fast Dynamic Control Scheme For Capacitor-Supported Interline DVRDocument14 pagesImplementation and Performance Evaluation of A Fast Dynamic Control Scheme For Capacitor-Supported Interline DVRRamphani NunnaNo ratings yet
- Tracing Current-Voltage Curve of Solar Panel Based On Labview Arduino InterfacingDocument8 pagesTracing Current-Voltage Curve of Solar Panel Based On Labview Arduino InterfacingJorge Santiago AvilaNo ratings yet
- Load Flow Analysis of An Eht Network Using Etap ®: June 2016Document7 pagesLoad Flow Analysis of An Eht Network Using Etap ®: June 2016vjvijay88No ratings yet
- Ie 07Document10 pagesIe 07gimNo ratings yet
- Impact of Loads On Power Flow in Power Systems Using Powerapps and EtapDocument4 pagesImpact of Loads On Power Flow in Power Systems Using Powerapps and EtapAmirNo ratings yet
- Dynamic Voltage Restorer Based On Self-CoupledDocument11 pagesDynamic Voltage Restorer Based On Self-CoupledPravin KumarNo ratings yet
- JMESTLoad Flow PaperDocument7 pagesJMESTLoad Flow PaperRistiani Aprilia SimanjuntakNo ratings yet
- Ultra Fast Fixed-Frequency Hysteretic Buck Converter With Maximum Charging Current Control and Adaptive Delay Compensation For DVS ApplicationsDocument8 pagesUltra Fast Fixed-Frequency Hysteretic Buck Converter With Maximum Charging Current Control and Adaptive Delay Compensation For DVS ApplicationsZhongpeng LiangNo ratings yet
- Applied Sciences: Special Issue "Advances in Control of Power Electronic Converters"Document3 pagesApplied Sciences: Special Issue "Advances in Control of Power Electronic Converters"asdNo ratings yet
- Optimization Technique For Power Quality Improvement Using DSTATCOM Neural Network Approach - A ReviewDocument5 pagesOptimization Technique For Power Quality Improvement Using DSTATCOM Neural Network Approach - A ReviewEditor IJTSRDNo ratings yet
- Lesson Learned From Power System Design With Powerworld SimulatorDocument7 pagesLesson Learned From Power System Design With Powerworld SimulatorAhosan HabibNo ratings yet
- DVC With EsDocument11 pagesDVC With EsanusmrithiNo ratings yet
- Analysis and Design of Three-Phase AC-to-DC Converters With High Power Factor and Near-Optimum FeedforwardDocument10 pagesAnalysis and Design of Three-Phase AC-to-DC Converters With High Power Factor and Near-Optimum FeedforwardTalha SadiqNo ratings yet
- The Low Cost Voltage and Current Measurement Device Design For Power ConvertersDocument7 pagesThe Low Cost Voltage and Current Measurement Device Design For Power ConvertersΧρηστος ΠεχλιβανηςNo ratings yet
- An Optimized Fast Voltage Stability Indicator: C. A. Belhadj M. A. AbidoDocument5 pagesAn Optimized Fast Voltage Stability Indicator: C. A. Belhadj M. A. Abidomfarouk1No ratings yet
- Mejor DisenoDocument8 pagesMejor Disenocommit_to_truthNo ratings yet
- Weak Bus For STATCOMDocument7 pagesWeak Bus For STATCOMChâu TúNo ratings yet
- 1 s2.0 S2352484721013251 MainDocument9 pages1 s2.0 S2352484721013251 MainFaiyaj LimonNo ratings yet
- Parameter Estimation of Linear Induction Motor Labvolt 8228-02Document7 pagesParameter Estimation of Linear Induction Motor Labvolt 8228-02Mohamed Riyad BoudallaaNo ratings yet
- Power Quality Improvement With SVC in A Power System of 220kVDocument5 pagesPower Quality Improvement With SVC in A Power System of 220kVSalah SaalhNo ratings yet
- Grid Connection Quasi Z-Source Inverter Based On Model Predictive Control With Less Sensors CountDocument7 pagesGrid Connection Quasi Z-Source Inverter Based On Model Predictive Control With Less Sensors CountckrimyouNo ratings yet
- Micro Controller Based PotentiostatDocument6 pagesMicro Controller Based PotentiostatMohamad Afif0% (1)
- Loadflowanalysisin 14 BussystemusingfactdevicesDocument8 pagesLoadflowanalysisin 14 Bussystemusingfactdevicesyohanis eshetuNo ratings yet
- 2008 Yin Man Development of Single-Transistor-Control LDO PDFDocument10 pages2008 Yin Man Development of Single-Transistor-Control LDO PDFrahmanakberNo ratings yet
- Power Flow Analysis of A Continuous Process Plant: (A Case Study)Document4 pagesPower Flow Analysis of A Continuous Process Plant: (A Case Study)hafizgNo ratings yet
- Final VersionDocument6 pagesFinal VersionLuis PerdomoNo ratings yet
- Icomet 2018 8346450Document7 pagesIcomet 2018 8346450bidhan poudelNo ratings yet
- Tracing Current-Voltage Curve of Solar Panel Based On Labview Arduino InterfacingDocument8 pagesTracing Current-Voltage Curve of Solar Panel Based On Labview Arduino InterfacingHabes NoraNo ratings yet
- Fuzzy Logic Controller Based STATCOM For Voltage Profile Improvement in A Micro-GridDocument7 pagesFuzzy Logic Controller Based STATCOM For Voltage Profile Improvement in A Micro-Gridharini shivNo ratings yet
- Design of Power Quality Monitoring System Based On Labview: Wang Shenghui, Chao Yong Jin XingDocument4 pagesDesign of Power Quality Monitoring System Based On Labview: Wang Shenghui, Chao Yong Jin XingMuhammad Sohaib ShahidNo ratings yet
- Power Factor Project PDFDocument5 pagesPower Factor Project PDFPritam100% (1)
- Automatic Phase Selector 4Document4 pagesAutomatic Phase Selector 4dondbNo ratings yet
- A Review On Voltage Stability and Power Quality Improvement by Using UPFC ControllerDocument5 pagesA Review On Voltage Stability and Power Quality Improvement by Using UPFC ControllerEditor IJTSRDNo ratings yet
- Optim 2014 BanuDocument7 pagesOptim 2014 BanuAliza SharifNo ratings yet
- Smart Storage For Active Distribution Networks. Estimation and Measurement SolutionsDocument6 pagesSmart Storage For Active Distribution Networks. Estimation and Measurement SolutionsmartinmunozbaNo ratings yet
- Voltage Stability Assessment Using Artificial Neural Network: March 2018Document6 pagesVoltage Stability Assessment Using Artificial Neural Network: March 2018vnrsamyNo ratings yet
- A New Virtual Oscillator Control Without Third Harmonics Injection For DC AC InverterDocument11 pagesA New Virtual Oscillator Control Without Third Harmonics Injection For DC AC InverterHauvuNo ratings yet
- Modeling and Analysis of Harmonic Stability in An AC Power-Electronics-Based Power SystemDocument12 pagesModeling and Analysis of Harmonic Stability in An AC Power-Electronics-Based Power SystemCici LalangNo ratings yet
- Coordinated Design of A Mb-Pss and Statcom Controller To Enhance Power System StabilityDocument22 pagesCoordinated Design of A Mb-Pss and Statcom Controller To Enhance Power System StabilityAmmar MyhoubNo ratings yet
- Steady State Analysis of IEEE-6 Bus Power System Using Power World SimulatorDocument5 pagesSteady State Analysis of IEEE-6 Bus Power System Using Power World SimulatorWaqarNo ratings yet
- Switching Function Design For Output Voltage Tracking in The DC DC Buck Power ConverterDocument14 pagesSwitching Function Design For Output Voltage Tracking in The DC DC Buck Power ConverterKaritonovh MarquezNo ratings yet
- GridDocument6 pagesGridgiongan342No ratings yet
- Design and Analysis of Medium Voltage Distribution Network Incorporating New Loads and Embedded GenerationDocument24 pagesDesign and Analysis of Medium Voltage Distribution Network Incorporating New Loads and Embedded Generationnikkyraghu9No ratings yet
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesFrom EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNo ratings yet
- STATCOM Study For 132 KV NAGPUR RING MAINDocument6 pagesSTATCOM Study For 132 KV NAGPUR RING MAINSaikrishnaNo ratings yet
- Ijctee 1111 19Document7 pagesIjctee 1111 19AwadHilmyNo ratings yet
- Applying Synchronous Condenser For Damping Provision in Converter-Dominated Power SystemDocument10 pagesApplying Synchronous Condenser For Damping Provision in Converter-Dominated Power SystemAndré LuizNo ratings yet
- Power Quality Detection in Distribution System With Wind Energy Penetration Using Discrete Wavelet TransformDocument6 pagesPower Quality Detection in Distribution System With Wind Energy Penetration Using Discrete Wavelet TransformDavid PerezNo ratings yet
- Optimal MigridsDocument5 pagesOptimal MigridselecandresNo ratings yet
- SCR IjepesDocument11 pagesSCR IjepeskarthikeyanNo ratings yet
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorFrom EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo ratings yet
- A Review of Single-Phase Grid-Connected Inverters For PV ModulesDocument15 pagesA Review of Single-Phase Grid-Connected Inverters For PV Modulesuama87No ratings yet
- Simulation and Designing of MPPT Based Solar PV System With DC-DC Boost ConverterDocument16 pagesSimulation and Designing of MPPT Based Solar PV System With DC-DC Boost ConverterSkp FANo ratings yet
- PID ResumenDocument6 pagesPID ResumenSkp FANo ratings yet
- Incremental Conductance MPPT Algorithm For PV System Implemented Using DC-DC Buck and Boost ConverterDocument10 pagesIncremental Conductance MPPT Algorithm For PV System Implemented Using DC-DC Buck and Boost ConverterSkp FANo ratings yet
- Comparison of Three Sinusoidal Pulse Width Modulation Techniques For Five-Level Cascaded Inverter Using SimulinkDocument6 pagesComparison of Three Sinusoidal Pulse Width Modulation Techniques For Five-Level Cascaded Inverter Using SimulinkSkp FANo ratings yet
- Design and Simulation of Flyback Converter in MATLAB Using PID ControllerDocument6 pagesDesign and Simulation of Flyback Converter in MATLAB Using PID ControllerSkp FANo ratings yet
- S8AENDocument8 pagesS8AENSkp FANo ratings yet
- Good Explanation ELCDocument12 pagesGood Explanation ELCCY KangNo ratings yet
- Differences in The Impact of Harmonic Distortion Due To The Installation of Electronic Load Controller in Self-Excited Induction Generator and Synchronous GeneratorDocument13 pagesDifferences in The Impact of Harmonic Distortion Due To The Installation of Electronic Load Controller in Self-Excited Induction Generator and Synchronous GeneratorIAES IJPEDSNo ratings yet
- Guo Liping 41 PDFDocument127 pagesGuo Liping 41 PDFYassine EL HoumNo ratings yet
- Electronic Load Controllers For Self Excited Induction GeneratorDocument5 pagesElectronic Load Controllers For Self Excited Induction GeneratorSkp FANo ratings yet
- Dynamic Modeling and Controller Design For A SinglDocument13 pagesDynamic Modeling and Controller Design For A SinglSkp FANo ratings yet
- ARM Based Electronic Load Controller For Micro-HydDocument11 pagesARM Based Electronic Load Controller For Micro-HydSkp FANo ratings yet
- Implementation of Electronic Load Controller For Control of Micro Hydro Power PlantDocument6 pagesImplementation of Electronic Load Controller For Control of Micro Hydro Power PlantSkp FANo ratings yet
- Design and Simulation of Flyback Converter in MATLAB Using PID ControllerDocument6 pagesDesign and Simulation of Flyback Converter in MATLAB Using PID ControllerSkp FANo ratings yet
- Edm Flyback Converter 6680-14547-2-PB PDFDocument7 pagesEdm Flyback Converter 6680-14547-2-PB PDFSimon NgigiNo ratings yet
- Stm32f4 LabsDocument430 pagesStm32f4 LabsBui Van Phat100% (4)
- 06 HAL TheoryDocument26 pages06 HAL TheorySkp FANo ratings yet
- 1 - Proton Compiler ManualDocument456 pages1 - Proton Compiler ManualSkp FANo ratings yet
- Paper8 PDFDocument14 pagesPaper8 PDFSkp FANo ratings yet
- New Single-Stage Soft-Switching Flyback Inverter For AC Module Application With Simple CircuitDocument6 pagesNew Single-Stage Soft-Switching Flyback Inverter For AC Module Application With Simple CircuitSkp FANo ratings yet
- 06 HAL TheoryDocument26 pages06 HAL TheorySkp FANo ratings yet
- Portafolios Apreciación CinematográficaDocument9 pagesPortafolios Apreciación CinematográficaSkp FANo ratings yet
- Eclipse Phase 2E v1.1 (Under CC BY-NC-SA 4.0 License)Document59 pagesEclipse Phase 2E v1.1 (Under CC BY-NC-SA 4.0 License)humanzyxNo ratings yet
- Statistics 1Document149 pagesStatistics 1Zaid AhmedNo ratings yet
- Uttarakhand Open UniversityDocument308 pagesUttarakhand Open UniversityCommerce WhizNo ratings yet
- SIM Ecosytem (Grade 6)Document26 pagesSIM Ecosytem (Grade 6)Donnaville Baja VildosolaNo ratings yet
- 5 Fit Tolerances-Problem SolvingDocument10 pages5 Fit Tolerances-Problem SolvingSHIVANANDA DALEINo ratings yet
- List of Academic Design ProjectsDocument4 pagesList of Academic Design ProjectsAnurag SinghNo ratings yet
- My Side of The Mountain PDFDocument61 pagesMy Side of The Mountain PDF12333% (3)
- Critically Discuss About Major Features of Water Resource Act, 2049 B.SDocument12 pagesCritically Discuss About Major Features of Water Resource Act, 2049 B.SPurple DreamNo ratings yet
- Critical Study of Richard Dawkins, The God DelusionDocument10 pagesCritical Study of Richard Dawkins, The God DelusionJuan Pablo Pardo BarreraNo ratings yet
- Math InterventionDocument2 pagesMath InterventionEmerita TrasesNo ratings yet
- China Domestic Style Test ProcessDocument2 pagesChina Domestic Style Test ProcessPopper JohnNo ratings yet
- September 2017 Part 1 Standardised Competence-Oriented Written School-Leaving ExaminationDocument32 pagesSeptember 2017 Part 1 Standardised Competence-Oriented Written School-Leaving Examinationbestgamer100% (1)
- Exhibitorlist Interz20 enDocument42 pagesExhibitorlist Interz20 enLindsay CatariNo ratings yet
- Grammar: Frequency AdverbsDocument2 pagesGrammar: Frequency AdverbsRedamanNo ratings yet
- E702.3M-18 - Acceptance of Concrete Compressive Strength Test Results According To ACI 318M-14Document6 pagesE702.3M-18 - Acceptance of Concrete Compressive Strength Test Results According To ACI 318M-14Christos Leptokaridis100% (1)
- Introducing Python Programming For Engineering Scholars: Zahid Hussain, Muhammad Siyab KhanDocument8 pagesIntroducing Python Programming For Engineering Scholars: Zahid Hussain, Muhammad Siyab KhanDavid C HouserNo ratings yet
- Asesor Internal TKRSDocument113 pagesAsesor Internal TKRSNingsih NingsihNo ratings yet
- Spatial Association Effect of Regional Pollution Control2019journal of Cleaner ProductionDocument13 pagesSpatial Association Effect of Regional Pollution Control2019journal of Cleaner ProductionArthur PimentelNo ratings yet
- 28-11-21 - JR - Iit - Star Co-Sc (Model-A) - Jee Adv - 2015 (P-I) - Wat-29 - Key & SolDocument8 pages28-11-21 - JR - Iit - Star Co-Sc (Model-A) - Jee Adv - 2015 (P-I) - Wat-29 - Key & SolasdfNo ratings yet
- Descriptive TextDocument3 pagesDescriptive TextcaaaaaNo ratings yet
- Debate PaperDocument8 pagesDebate PaperLove MaribaoNo ratings yet
- Weatherford OEPS BrochureDocument5 pagesWeatherford OEPS BrochureZharick RojasNo ratings yet
- Year 9 Mathematics Term 2 Exam PaperDocument20 pagesYear 9 Mathematics Term 2 Exam PaperAyemyanandar KyiNo ratings yet
- Development and Assessment of A Hand Assist DeviceDocument15 pagesDevelopment and Assessment of A Hand Assist DeviceAugusto Rodas VelezNo ratings yet
- Time Schedule of Subjects International Class Program (Icp) Fmipa Unm Biology Department, Odd Semester, Academic Year 2010/2011Document2 pagesTime Schedule of Subjects International Class Program (Icp) Fmipa Unm Biology Department, Odd Semester, Academic Year 2010/2011El MuertoNo ratings yet
- Gemuruh Jiwa: Far Away From HomeDocument1 pageGemuruh Jiwa: Far Away From HomeIvy TingNo ratings yet
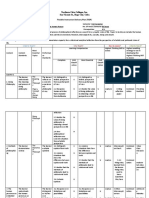
- Northern Cebu Colleges, Inc. San Vicente ST., Bogo City, Cebu Flexible Instruction Delivery Plan (FIDP)Document6 pagesNorthern Cebu Colleges, Inc. San Vicente ST., Bogo City, Cebu Flexible Instruction Delivery Plan (FIDP)Jilmore Caseda Cantal100% (1)
- RubanMurugesan WebOfScience Researcher CV 20230718Document2 pagesRubanMurugesan WebOfScience Researcher CV 20230718Mr.M.Ruban Vels UniversityNo ratings yet
- Physical Science NOV. 20-22, 2019 DLPDocument2 pagesPhysical Science NOV. 20-22, 2019 DLPJedidiah Jara QuidetNo ratings yet
- ASTM - E1137 - مشخصات دماسنجهای مقاومتی صنعتیDocument7 pagesASTM - E1137 - مشخصات دماسنجهای مقاومتی صنعتیhosein bagheriNo ratings yet