You might also like
- Certified Solidworks Professional Advanced Weldments Exam PreparationFrom EverandCertified Solidworks Professional Advanced Weldments Exam PreparationRating: 5 out of 5 stars5/5 (1)
- 722.9 TransDocument16 pages722.9 TransDavid Rosado100% (5)
- IRobot Scooba Service ManualDocument61 pagesIRobot Scooba Service Manualbiggertv0% (1)
- Alignment Procedure PDocument8 pagesAlignment Procedure PvinothenergyNo ratings yet
- Analog DevicesDocument92 pagesAnalog DevicesDaniel HernandezNo ratings yet
- Components Code and Abbreviation On Laptop MotherboardDocument15 pagesComponents Code and Abbreviation On Laptop Motherboardkemal12750% (2)
- Pelton Turbine ReportDocument9 pagesPelton Turbine ReportIzzah Yahya II91% (46)
- Alarm Clock Project Final ReportDocument14 pagesAlarm Clock Project Final ReportArkadip Ghosh20% (5)
- 2006 07 PDFDocument152 pages2006 07 PDFrobert arhireNo ratings yet
- Nammthya 000006Document40 pagesNammthya 000006Şevval YalınNo ratings yet
- FC 4.1.8 - Critical Lift PlanDocument1 pageFC 4.1.8 - Critical Lift PlanJosef Demner Tiu PaspeNo ratings yet
- TLE-TE 9 - Q1 - W4 - Mod4 - ICT CSSDocument21 pagesTLE-TE 9 - Q1 - W4 - Mod4 - ICT CSSrose arianne nadayao100% (3)
- 5G NR Air Interface Overview PDFDocument26 pages5G NR Air Interface Overview PDFwaelq2003No ratings yet
- Lab 8 (Flip Flops)Document5 pagesLab 8 (Flip Flops)hananNo ratings yet
- DLD Manual - EXP - 6Document4 pagesDLD Manual - EXP - 6Ahmad RazaNo ratings yet
- EEE 180.1 Lab2Document3 pagesEEE 180.1 Lab2Enrico PonceNo ratings yet
- CPE108L OL101 1Q2021 Lab6 IndRep Group03 MejiaRIB PDFDocument6 pagesCPE108L OL101 1Q2021 Lab6 IndRep Group03 MejiaRIB PDFDioselle CastilloNo ratings yet
- DCD Lab Manual 3rd SemDocument36 pagesDCD Lab Manual 3rd Semmirage SATINo ratings yet
- Experiment 9 14 PLC Quiz 3fDocument30 pagesExperiment 9 14 PLC Quiz 3fKevin Johnson PuraNo ratings yet
- 11 Caldwell BBP 1 FinalDocument1 page11 Caldwell BBP 1 FinalThomas StempienNo ratings yet
- X Skill Module Number: Subject: W211 Instructor Led WalkaroundDocument8 pagesX Skill Module Number: Subject: W211 Instructor Led Walkaroundarkhom1No ratings yet
- LOSASDocument2 pagesLOSASIsabelNo ratings yet
- 4 Bit Arithmatic UnitDocument6 pages4 Bit Arithmatic UnitMd.tanjeelur Rahman Labib 2013677642No ratings yet
- ROBO-237 Test#3 PracticeDocument9 pagesROBO-237 Test#3 PracticeLenis ThambiNo ratings yet
- The Design Process & ALU DesignDocument6 pagesThe Design Process & ALU DesignNarender KumarNo ratings yet
- Fall 2023 - CS606 - 2Document4 pagesFall 2023 - CS606 - 2suleman.naeem1516No ratings yet
- Clase 3 Scratch TurningDocument12 pagesClase 3 Scratch TurningSandra Patricia Motoa SabalaNo ratings yet
- HDMI Chevrolet MyLink ManualDocument31 pagesHDMI Chevrolet MyLink ManualosvaldolomelisotoNo ratings yet
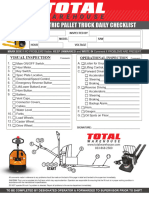
- Checklist ElectricPalletTruckDocument1 pageChecklist ElectricPalletTruckMustafa TawfekNo ratings yet
- Checklist ElectricPalletTruckDocument1 pageChecklist ElectricPalletTruckMustafa TawfekNo ratings yet
- Critical Lift Plan FormDocument2 pagesCritical Lift Plan FormSagun AlmarioNo ratings yet
- Graphing MotionDocument3 pagesGraphing Motiontownsenr940% (1)
- Lab 8 CALDDocument15 pagesLab 8 CALDSara AdnanNo ratings yet
- Lab 5Document10 pagesLab 5nasarsidd986No ratings yet
- 217 Mod 05-1 Transfer Case Installed (IC TF OP) 2-03-03Document4 pages217 Mod 05-1 Transfer Case Installed (IC TF OP) 2-03-03arkhom1No ratings yet
- Thabo Ngobeni - PortfolioDocument11 pagesThabo Ngobeni - PortfoliothaboNo ratings yet
- P:XYZ Contractor/Forms/Site Specific Steel Erection Plan and ChecklistDocument5 pagesP:XYZ Contractor/Forms/Site Specific Steel Erection Plan and ChecklistocnszNo ratings yet
- Co Lab ManualDocument81 pagesCo Lab ManualShiva KumarNo ratings yet
- Half Adder and Full Adder: DHA Suffa University Department of Computer Science CS 1101L Digital Logic Design Spring 2021Document3 pagesHalf Adder and Full Adder: DHA Suffa University Department of Computer Science CS 1101L Digital Logic Design Spring 2021Tayyab ShafiqNo ratings yet
- EE448 Lab 2 ReportDocument6 pagesEE448 Lab 2 ReportSai KiranNo ratings yet
- QA For PV 2010Document5 pagesQA For PV 2010Alok DasNo ratings yet
- Lab 9 Liveload Staad LoadingDocument7 pagesLab 9 Liveload Staad Loadingshaina mae omandacNo ratings yet
- Inventor Sample Modules - The CAD GuysDocument0 pagesInventor Sample Modules - The CAD GuysMuchammad Ichiya' UlumuddinNo ratings yet
- Exp-1 ODLDocument5 pagesExp-1 ODL19-MCE-30 Usama manzoorNo ratings yet
- Flip Flops and Counters: Digital Logic Design LaboratoryDocument16 pagesFlip Flops and Counters: Digital Logic Design LaboratoryTrương Quang TườngNo ratings yet
- Screenshot 2566-09-08 at 20.27.55Document8 pagesScreenshot 2566-09-08 at 20.27.55dhanabadee.kNo ratings yet
- Critical Lift Plan Form - Sa 9644 Rev.01Document1 pageCritical Lift Plan Form - Sa 9644 Rev.01Anuraj0% (1)
- 22564-2022-Winter-Model-Answer-Paper (Msbte Study Resources)Document24 pages22564-2022-Winter-Model-Answer-Paper (Msbte Study Resources)Ismail TanteNo ratings yet
- Breadboard ActivityDocument6 pagesBreadboard ActivityVanjeff ZurcNo ratings yet
- 03 - Muse Ed - Sr-02-0-Ann - 09Document11 pages03 - Muse Ed - Sr-02-0-Ann - 09Moises PerelloNo ratings yet
- MUSE ED Elevator: Start - UpDocument34 pagesMUSE ED Elevator: Start - UpMoises PerelloNo ratings yet
- Bitwise OperatorsDocument15 pagesBitwise OperatorsArya BhattNo ratings yet
- E09-X01 Rev 0 Dec 2000 Motor Control Center 600 V (NEC) - DDocument4 pagesE09-X01 Rev 0 Dec 2000 Motor Control Center 600 V (NEC) - DHamidNo ratings yet
- Critical Lift PlanDocument1 pageCritical Lift PlanRajanNo ratings yet
- Coe321-Ho-03-Working With Combinational LogicDocument24 pagesCoe321-Ho-03-Working With Combinational Logicjamil haidar ahmadNo ratings yet
- Marked Work-Sheet Full Speed AheadDocument4 pagesMarked Work-Sheet Full Speed Aheadapi-233276394No ratings yet
- Application Worksheet PROCAP Capacitance Probes & Vibrating Rod Point Level IndicatorDocument1 pageApplication Worksheet PROCAP Capacitance Probes & Vibrating Rod Point Level IndicatorJavier RamirezNo ratings yet
- Robotics Tutorial EditedDocument12 pagesRobotics Tutorial EditedboncitNo ratings yet
- Ec6612-Vlsi Design Lab Observation: Name Regno Class/SemDocument109 pagesEc6612-Vlsi Design Lab Observation: Name Regno Class/SemJ.Gowri ShankarNo ratings yet
- Isoquants: Isoquant Curve & Isocost Curve 1Document19 pagesIsoquants: Isoquant Curve & Isocost Curve 1Chitra GangwaniNo ratings yet
- Transcript - Degree - University Card - Admission LetterDocument1 pageTranscript - Degree - University Card - Admission LetterAbdul Wahid NohriNo ratings yet
- Critical Lift PlanDocument2 pagesCritical Lift Plansaquib eqbalNo ratings yet
- Análisis Cargas Gravit MayoradasDocument2 pagesAnálisis Cargas Gravit MayoradasJuan Camilo García DuránNo ratings yet
- Planar Linkage Synthesis: A modern CAD based approachFrom EverandPlanar Linkage Synthesis: A modern CAD based approachNo ratings yet
- CSE Test 1Document2 pagesCSE Test 1Zakwan WanNo ratings yet
- Final Year Project: Implementation On Fpga Based FSM On Line FollowingDocument1 pageFinal Year Project: Implementation On Fpga Based FSM On Line FollowingZakwan WanNo ratings yet
- Interfacing MATLAB and ROS PDFDocument17 pagesInterfacing MATLAB and ROS PDFluis quitianNo ratings yet
- CaravanDocument1 pageCaravanZakwan WanNo ratings yet
- Nigen Sample ReportDocument13 pagesNigen Sample ReportZakwan WanNo ratings yet
- Water: Estimating Daily Dew Point Temperature Using Machine Learning AlgorithmsDocument13 pagesWater: Estimating Daily Dew Point Temperature Using Machine Learning AlgorithmsZakwan WanNo ratings yet
- Epm240mini Voting PDFDocument28 pagesEpm240mini Voting PDFZakwan WanNo ratings yet
- Algorithm For Line Follower Robots To Follow Critical Paths With Minimum Number of SensorsDocument10 pagesAlgorithm For Line Follower Robots To Follow Critical Paths With Minimum Number of SensorsEdiNo ratings yet
- CaravanDocument1 pageCaravanZakwan WanNo ratings yet
- Receipt - Presentation OutlineDocument1 pageReceipt - Presentation OutlineZakwan WanNo ratings yet
- Bertram BOM PDFDocument4 pagesBertram BOM PDFZakwan WanNo ratings yet
- Presentation Outline: by Muhammad ZakwanDocument6 pagesPresentation Outline: by Muhammad ZakwanZakwan WanNo ratings yet
- Following A Sequence : State Machines in VHDLDocument4 pagesFollowing A Sequence : State Machines in VHDLZakwan WanNo ratings yet
- Linetracking - 20080702 VHDLDocument5 pagesLinetracking - 20080702 VHDLAdel AshyapNo ratings yet
- Example FSM - Robot Line Follower Robot FSM - State Diagram: State 010 Inputs From SensorsDocument1 pageExample FSM - Robot Line Follower Robot FSM - State Diagram: State 010 Inputs From SensorsZakwan WanNo ratings yet
- Presentation OutlineDocument6 pagesPresentation OutlineZakwan WanNo ratings yet
- Matlab RosDocument11 pagesMatlab RosZakwan WanNo ratings yet
- Form G - File Upload Confirmation FormDocument1 pageForm G - File Upload Confirmation FormZakwan WanNo ratings yet
- Test 1 Bfm4633 Data AnalyticDocument9 pagesTest 1 Bfm4633 Data AnalyticZakwan WanNo ratings yet
- CaravanDocument1 pageCaravanZakwan WanNo ratings yet
- Lecture 1 - Introductory To Data AnalyticsDocument11 pagesLecture 1 - Introductory To Data AnalyticsZakwan WanNo ratings yet
- Design and Simulate Three Phase Sinusoidal Control SignalDocument1 pageDesign and Simulate Three Phase Sinusoidal Control SignalZakwan WanNo ratings yet
- EDC Model PapersDocument12 pagesEDC Model PapersanithaNo ratings yet
- Chapter 4 - MP DSBDocument42 pagesChapter 4 - MP DSBsheham ihjamNo ratings yet
- ProblemsDocument11 pagesProblemsZeyad AymanNo ratings yet
- NOJA-7234-03 RC Panel Quick Reference Guide enDocument2 pagesNOJA-7234-03 RC Panel Quick Reference Guide enmilagros robledoNo ratings yet
- 3000Hp SOCAR Cable List P00Document13 pages3000Hp SOCAR Cable List P00Eldar IsgenderovNo ratings yet
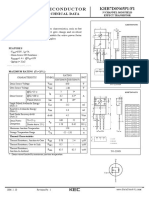
- Semiconductor KHB7D0N65P1/F1: Technical DataDocument7 pagesSemiconductor KHB7D0N65P1/F1: Technical DataDaniel DominguezNo ratings yet
- SHS TVL Ict Animation Week 5 - Objects To Be Measured - Melita PascuaDocument5 pagesSHS TVL Ict Animation Week 5 - Objects To Be Measured - Melita PascuaBook_AinjelleNo ratings yet
- "Rto App": A Major Project Report ONDocument42 pages"Rto App": A Major Project Report ONsaurabh gupta100% (1)
- Embedded Interview QuestionsDocument6 pagesEmbedded Interview QuestionsFirdaus AlamNo ratings yet
- ELS 01 Juli 2023Document20 pagesELS 01 Juli 2023Dwi hawNo ratings yet
- 4A Lesson Exemplars Using The Idea Instructional ProcessDocument3 pages4A Lesson Exemplars Using The Idea Instructional Processrose arianne nadayaoNo ratings yet
- Usb 3.0 Solutions - InitioDocument18 pagesUsb 3.0 Solutions - InitioYanto Sae100% (1)
- Lenovo Ideapad 120S-14IAP Winbook 120S - MB - V1.0Document63 pagesLenovo Ideapad 120S-14IAP Winbook 120S - MB - V1.0samasca_serbanNo ratings yet
- Microchip PolarFire FPGA and PolarFire SoC FPGA Clocking Resources User Guide VBDocument68 pagesMicrochip PolarFire FPGA and PolarFire SoC FPGA Clocking Resources User Guide VBSi Thu TunNo ratings yet
- Configuration Guide: Vaisala Multi-Observation GatewayDocument20 pagesConfiguration Guide: Vaisala Multi-Observation GatewayalvaroNo ratings yet
- Energy-Report HTMLDocument5 pagesEnergy-Report HTMLSandeep kumarNo ratings yet
- Macbook Pro A2289 - Căutare GoogleDocument1 pageMacbook Pro A2289 - Căutare Googledenisdinca5No ratings yet
- Chapter 7 Basic Processing UnitDocument58 pagesChapter 7 Basic Processing UnitRoopa B SNo ratings yet
- USLEM TLE10 CSS Q1 M3 Computer Hardware ComponentsDocument10 pagesUSLEM TLE10 CSS Q1 M3 Computer Hardware ComponentsDaryhl DavenNo ratings yet
- Introduction To Embedded Systems - : Lesson 1: Definition, Classification, Skills Required, Application Examples, .Document15 pagesIntroduction To Embedded Systems - : Lesson 1: Definition, Classification, Skills Required, Application Examples, .MOHD ABDUL SATTARNo ratings yet
- Manual Căşti HAMA 00184067Document182 pagesManual Căşti HAMA 00184067GABRIEL-LIVIUNo ratings yet
- Recommendations For Iot Device Manufacturers:: Foundational Activities and Core Device Cybersecurity Capability BaselineDocument41 pagesRecommendations For Iot Device Manufacturers:: Foundational Activities and Core Device Cybersecurity Capability BaselineAndres GarciaNo ratings yet
- 78d33 DatasheetDocument4 pages78d33 DatasheetJorge AdrianNo ratings yet
- Triangular Wave Generator Using Op Amp - WaveformsDocument6 pagesTriangular Wave Generator Using Op Amp - WaveformsNagendrababu VasaNo ratings yet
- STR 6XXX SeriesDocument2 pagesSTR 6XXX SeriesGabriel LatiuNo ratings yet
- Hands On Vhost-User: A Warm Welcome To DPDK: 17-22 MinutesDocument13 pagesHands On Vhost-User: A Warm Welcome To DPDK: 17-22 Minutessunnyb77No ratings yet