You might also like
- ECE 3810 Introduction To Power EngineeringDocument17 pagesECE 3810 Introduction To Power EngineeringAkif DharNo ratings yet
- O.C. and S.C. Test On 1 Phase TransformerDocument9 pagesO.C. and S.C. Test On 1 Phase TransformerAyah Hamed AliNo ratings yet
- Wednesday, July 15, 2020 DC MotorDocument5 pagesWednesday, July 15, 2020 DC MotorRayhan TalukderNo ratings yet
- Pss Lab QuestionsDocument7 pagesPss Lab QuestionsPandyselvi BalasubramanianNo ratings yet
- 02 - Voltage Control-Grid Connected PV - 65 - v0Document21 pages02 - Voltage Control-Grid Connected PV - 65 - v0Oscar Eduardo CasillaNo ratings yet
- Resumen Por AreasDocument10 pagesResumen Por AreasDanilo QuevedoNo ratings yet
- Half Cut 550w Solar PanelDocument1 pageHalf Cut 550w Solar PanelIvan DumontNo ratings yet
- V.I.P. Dasanayake Capacitance - 2Document6 pagesV.I.P. Dasanayake Capacitance - 2Isuru Pasan DasanayakeNo ratings yet
- Suggested Answer PowerDocument60 pagesSuggested Answer Powerengineeraina2460100% (1)
- Wind Turbine Design OptimizationDocument16 pagesWind Turbine Design OptimizationArun Raj A CNo ratings yet
- Lab 6 - RedresorulDocument27 pagesLab 6 - RedresorulIonelNo ratings yet
- 2.5 MW Doubly Fed Induction Generator: Appendix CDocument1 page2.5 MW Doubly Fed Induction Generator: Appendix CShaswat JhaNo ratings yet
- Arijit Amd Assaingment-1Document21 pagesArijit Amd Assaingment-1Arijit DasNo ratings yet
- Impulse GeneratorDocument10 pagesImpulse GeneratorUdaya PushpakumaraNo ratings yet
- Experiment 4 1-09-2021: Aviral Singh 19BEI0067Document12 pagesExperiment 4 1-09-2021: Aviral Singh 19BEI0067freeretdocsNo ratings yet
- Tanishq - Ohm's LawDocument9 pagesTanishq - Ohm's LawShah Tanishq RiteshkumarNo ratings yet
- !7374656d5f26736f6c7574696f6e73 PDFDocument12 pages!7374656d5f26736f6c7574696f6e73 PDFluckyNo ratings yet
- Tutorial 6 Sol.Document5 pagesTutorial 6 Sol.JosePh TruongNo ratings yet
- 2 Performance Test On Solar Photovoltaic PanelDocument3 pages2 Performance Test On Solar Photovoltaic PanelManish VankudreNo ratings yet
- Assignment IIDocument8 pagesAssignment IIq8400No ratings yet
- Ee8711 Set1Document14 pagesEe8711 Set1St. Anne's CET (EEE Department)No ratings yet
- 1 13.8 Kv. 1 69 KVDocument35 pages1 13.8 Kv. 1 69 KVDedy SubagyoNo ratings yet
- EM 2 Unit 2Document16 pagesEM 2 Unit 2KeerthiSaha100% (1)
- Transformer Pasar Am IDocument8 pagesTransformer Pasar Am IJennel BaringNo ratings yet
- Eda Bricolage PhilippinesDocument7 pagesEda Bricolage Philippinesven villanuevaNo ratings yet
- Massachusetts Institute of TechnologyDocument6 pagesMassachusetts Institute of TechnologyengshimaaNo ratings yet
- X (1-Cos 22) : KWH (PowerDocument1 pageX (1-Cos 22) : KWH (Powerreymart cereneoNo ratings yet
- De La Rosa Ricapa LuisitoDocument1 pageDe La Rosa Ricapa LuisitoUni ExpertoNo ratings yet
- PSSQPDocument5 pagesPSSQPDurai MuruganNo ratings yet
- Module 10 - Paralleling of DC GeneratorsDocument24 pagesModule 10 - Paralleling of DC GeneratorsNoel Bacton100% (1)
- ReportDocument30 pagesReportzabihuq100% (1)
- Material N 10Document44 pagesMaterial N 10Juan Carlos Acosta HernandezNo ratings yet
- Conceptual Clarifications in Electrical Power Engineering-XmfrDocument26 pagesConceptual Clarifications in Electrical Power Engineering-Xmfrsalemg82No ratings yet
- Back Contact Cell GroundingDocument4 pagesBack Contact Cell GroundingRoss Wong100% (1)
- Experiment 4 The DC Compound Generator: Muhammad Al-Ariff Bin Selamat (112215), Muhammad Azfar Amin Bin Ahmad MokhtarDocument4 pagesExperiment 4 The DC Compound Generator: Muhammad Al-Ariff Bin Selamat (112215), Muhammad Azfar Amin Bin Ahmad MokhtarMichael Philip ChuaNo ratings yet
- Applied Electronics and Electrical MachinesDocument30 pagesApplied Electronics and Electrical MachinesdenNo ratings yet
- Construction and Analysis of Generator Actual Capability Curves Using The New MethodDocument11 pagesConstruction and Analysis of Generator Actual Capability Curves Using The New MethodMuthukumar SivaramanNo ratings yet
- Case Study of Factor Affecting Current Transformer Operation in Saturation Point of View Using MATLABDocument4 pagesCase Study of Factor Affecting Current Transformer Operation in Saturation Point of View Using MATLABswathi123456No ratings yet
- Saudi Electricity Company Central Region Branch: Design of Crane GirderDocument47 pagesSaudi Electricity Company Central Region Branch: Design of Crane GirdereljammalNo ratings yet
- Lab 9 PhysicsDocument5 pagesLab 9 Physicschristian WilliamsNo ratings yet
- FLORIDA2005 Kurzweil GallayDocument12 pagesFLORIDA2005 Kurzweil GallayAthanasios MasourasNo ratings yet
- Fault Level CalculationDocument3 pagesFault Level CalculationVERMAZ ENGG. DESIGNNo ratings yet
- WEG Thermal Overload Relays RW enDocument24 pagesWEG Thermal Overload Relays RW enshift EngineerNo ratings yet
- EE102 Group 2 LAB 5Document11 pagesEE102 Group 2 LAB 5Ankit NadanNo ratings yet
- Puente de Diodos DatasheetDocument2 pagesPuente de Diodos DatasheetSaúl CastilloNo ratings yet
- Load Calculation 5Document21 pagesLoad Calculation 5Royce PaladaNo ratings yet
- Em Lab 1 - CompressedDocument16 pagesEm Lab 1 - Compressedabhishek kolseNo ratings yet
- Saudi Electricity Company Central Region Branch: Design of Crane GirderDocument12 pagesSaudi Electricity Company Central Region Branch: Design of Crane GirderOmar SalahNo ratings yet
- An Introduction To DC Generator Using Matlab/Simulink: Debabrata PalDocument4 pagesAn Introduction To DC Generator Using Matlab/Simulink: Debabrata PalAnonymous zzfx7mz3No ratings yet
- Lecture-Practical TransformersDocument16 pagesLecture-Practical Transformershaseem hanaNo ratings yet
- AUTOCLAVEDocument1 pageAUTOCLAVELudwig Hinlo DiosanaNo ratings yet
- Experiment 4 The DC Compound Generator: Muhammad Al-Ariff Bin Selamat (112215), Muhammad Azfar Amin Bin Ahmad MokhtarDocument5 pagesExperiment 4 The DC Compound Generator: Muhammad Al-Ariff Bin Selamat (112215), Muhammad Azfar Amin Bin Ahmad MokhtarOne Love Jah LoveNo ratings yet
- 2020 White Paper Synchronous CondenserDocument13 pages2020 White Paper Synchronous CondenserAlbertoMatallanosNo ratings yet
- M&I Unit 3Document6 pagesM&I Unit 3KeerthiSahaNo ratings yet
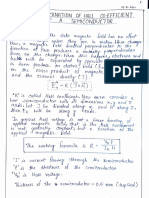
- Determination of Hall CoefficientDocument5 pagesDetermination of Hall CoefficientKiyaNo ratings yet
- Influence of System Parameters Using Fuse Protection of Regenerative DC DrivesFrom EverandInfluence of System Parameters Using Fuse Protection of Regenerative DC DrivesNo ratings yet
- Practical Troubleshooting of Electrical Equipment and Control CircuitsFrom EverandPractical Troubleshooting of Electrical Equipment and Control CircuitsRating: 4 out of 5 stars4/5 (5)
- Cad Lab ManualDocument1 pageCad Lab ManualRAM SINGHNo ratings yet
- Mobile Robot Platform With Arduino Uno and Raspber PDFDocument6 pagesMobile Robot Platform With Arduino Uno and Raspber PDFamal chalbiNo ratings yet
- Mechatronics DC Motor - Tachometer Closed-Loop Speed Control SystemDocument29 pagesMechatronics DC Motor - Tachometer Closed-Loop Speed Control SystemskheoNo ratings yet
- 1.2 ABB - NPS - EN - Low - ResDocument62 pages1.2 ABB - NPS - EN - Low - Resmarceloleon4No ratings yet
- Parker GVM 310Document16 pagesParker GVM 310namanbhatia505No ratings yet
- 15EEE401 - I Ass July 2019Document3 pages15EEE401 - I Ass July 2019sriharshitha vegesnaNo ratings yet
- H101 TPS Manual Eol PDFDocument50 pagesH101 TPS Manual Eol PDFSachin NaitamNo ratings yet
- Vibrating Sample Magnetometer (VSM) : Working PrincipleDocument4 pagesVibrating Sample Magnetometer (VSM) : Working PrincipleDina Assefa100% (1)
- Conveyor Belt Design For Bottling Plant of Coca ColaDocument118 pagesConveyor Belt Design For Bottling Plant of Coca Colavivekpattni50% (4)
- Tpo FinalDocument36 pagesTpo FinalJaiah Mer Campos UbasNo ratings yet
- HATLAPA Deck CompressorTechnical Documentation 10.5574Document93 pagesHATLAPA Deck CompressorTechnical Documentation 10.5574Sergei GovorkoNo ratings yet
- HDP 172Document4 pagesHDP 172Nahid RahmaniNo ratings yet
- Generator BasicsDocument8 pagesGenerator BasicsRajashekarBheemaNo ratings yet
- Rotary CompressorsDocument52 pagesRotary Compressorsmikeincognito100% (1)
- SIMOTICS General Purpose Cast MotorsDocument8 pagesSIMOTICS General Purpose Cast MotorsJaime Adolfo Mejia LeónNo ratings yet
- RPL201H Traction Controller Error Code ListDocument19 pagesRPL201H Traction Controller Error Code Listvictor laraNo ratings yet
- Research and Design of A Multifunctional Soft StarterDocument5 pagesResearch and Design of A Multifunctional Soft StarterThuy LeNo ratings yet
- Dual Full-Bridge MOSFET Driver With Microstepping TranslatorDocument16 pagesDual Full-Bridge MOSFET Driver With Microstepping TranslatorВладимир ЯткевичNo ratings yet
- CB 280 Hyd Motor Manual PDFDocument34 pagesCB 280 Hyd Motor Manual PDFBibhudutta JethyNo ratings yet
- Customer Information PacketDocument10 pagesCustomer Information PacketJose Enrique Ayala VillegasNo ratings yet
- Bearing Current and Shaft Voltage Measurement in Electrical MotorsDocument59 pagesBearing Current and Shaft Voltage Measurement in Electrical Motorselectrical100% (1)
- Autonomous Fire Detecting and Extinguishing Robot: Abstract - This Paper Examines and Leverages The Potential ofDocument3 pagesAutonomous Fire Detecting and Extinguishing Robot: Abstract - This Paper Examines and Leverages The Potential ofCESAR LUIGGI ZAMORA OBLITASNo ratings yet
- Kta 3504Document29 pagesKta 3504Juan Manuel Gutierrez AguilarNo ratings yet
- G120 - Manual IOP Panel G120 PDFDocument62 pagesG120 - Manual IOP Panel G120 PDFAlvaro FloresNo ratings yet
- Steering System - (08-2003) - Us-EnDocument38 pagesSteering System - (08-2003) - Us-EnChristian BedoyaNo ratings yet
- Ceiling FanDocument6 pagesCeiling FanGovind RajputNo ratings yet
- OptimusDocument56 pagesOptimusAnpolNo ratings yet
- Coavis Brochure enDocument14 pagesCoavis Brochure enJohnBachNo ratings yet
- Designing Servo Motors Using JMAG-Express Online VersionDocument5 pagesDesigning Servo Motors Using JMAG-Express Online VersionInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- EMC Manual Servodyn-T, - DDocument71 pagesEMC Manual Servodyn-T, - DJWNo ratings yet