Renewal Susan Reviews 75 (2017) 717-727
ELSEVIER
journal homepage: www.
Contents lists available at ScienceDirect
Renewable and Sustainable Energy Reviews
wvier.com/locate/rser
A review of droop control techniques for microgrid
Usman Bashir Tayab*, Mohd Azrik Bin Roslan*, Leong Jenn Hw.
* rinesity Maa Perk Malye
Unterty Malas Sarat Malai
ARTICLE INFO ABSTRACT
Kent
Drovp cota cage
Rewer
covsMack
', Muhammad Kashif"
‘Coordination of diferent distributed goneration (DG) units is essential to meet the inewasing demand for
ectiaty. Many contol statis, suchas droop conto, masterdave coal, and average current hating
‘contol, have been extensively implemented worlwide to operate paale-connected inverters for lod sharing
‘in DC network Among thse methods, the droop contrel technique has bocn widely acceptot inthe scenic
‘community because of the abounce of eieal communication links among paralle-connecte inverters to
‘coordinate the DA units within a miroprid. Thus, this study highlights the stat-of-theart review of droop
control techniques applied carey to cordate the DU wnt within» miro
1. Introduction
[Non-renewable resources, such as diese, coal, and gas, ane major
energy sources of electrical energy produced by traditional power
tenerators worldwide. However, the increasing demand for electrical
energy, depletion of reserves of non-renewable resources, and genera-
tion of electrical energy from non-renewable resources have rested in
environmental pollution [1-3]. Therefore, the development of a
distributed generation (DG) system that utilizes renewable resources
to generate electricity is necessary (4,
'DG systems are suitable for providing highly reliable electric power
I). Several types of energy resources, such as solar thermal panels,
photovoltaic panels, fuel cells, and mieroturbines, are currently avail
able [7,8]. These renewable resonrees are felt to connect directly to
‘a blty grid A mlcrogri isan interface Detween distributed renewable
respurces and the uly grid. This interface is a low-voltage disteibu-
tion system consisting of DG units, energy storage devies, and load
Furthermore, a mierogrd ean be operated separately or connected to 2
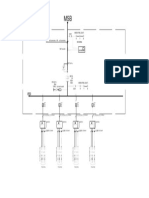
rain distribution system [9-11]. Fig. 1 lustrates the general archi
tecture of a microgrid (12). tn addition, compared with a single DG
uit, © microgrid has high capacity and eoatrol fleibiity to full
power-quality requirements (13)
Ly contrast, the electric power generated from several renewable
resources is in direct current (DC) form and eonverted to alternating
current (AC) by an inverter [1]. Thus, an inverter is a crucial
component of a microgrid. Furthermore, an inverter acts as an inter
face between the DG unit, load, and grid [15]. Inverters are also used
parallel o a microgrid to improve performanee. Parallel operation of
© = Carresponiing autho.
‘Bima lr ean yaya com (UR. Tp
tation 10 1016/1 2017.08.08
tom 2017 vier A igh seve
inverters often provides high reliability, because the remaining mod-
ules can stil deliver the required power tothe loadin case an inverter
fails [16]. Several control techniques have een proposed for proper
‘operation of purallel-connected inverters in mierogrid. Among these
‘methods, voltage and frequency droop control has gained popularity
and is considered as a well-established methed [17-19]. Thus, this
paper presents an overview of recent studies on the droop control
technique.
Section 2 provides an averview of the conventional droop control
technique, Section $ presents the vietual impedance loop-based droop
control technique. Thereafter, Section 4 discusses the working principle
Of the adaptive droop and robust droop control technique. Section 5
focuses on simulations to support the analysis. Soction 6 provides a
discussion on diferent methods and future work, Finally, Section 7
concludes this report
2. Conventional droop control
“The inverter output impedance in the conventional droop control
[20-22] is assumed to be purely inductive because ofits high inductive
Tine impedance and large inductor fle. The equivalent circuit of two
inverters connected in parallel to a point of common coupling bus is
shown in Fig. 2(), and the phasor diagram is shown in Fi. 2b). In an
inductive system, the active and reactive power drawn to a bus from
each inverter ean be expressed a follows [29,2]
EV sin
x ©
Um Taga ea
4a.
wee
1 Gitconeced Mood
Renewable and Ssnabe Brergy Reviews 76 2017) 717-727
—e®
aa.
(0) Bled Mo
lg A General areata oa lei (4) Greene ier (D) Mandal mic
Invern
e260 Epiaet med of tr verter etl in pr opt of come
soup ba (0) Menge,
EV coma vt
x
@
where Band Vate the amplitudes ofthe inverter output voltage nd the
common bus voltage, respectively, is the power angle, and X is the
‘utpnt reactance of the inverter.
Based on Eqs. (1)-(2) and small power angle atsin « ~ a and
cosa=1), the active power injected from the inverter to the
common bus is predominantly influenced by the power angle. By
contrast, the reactive power is strongly dependent on the amplitude
difference between £ and V. In addition, the inverter output voltage
pphase can be changed by altering the inverter output voltage
frequency. Consequently, the wireless eontrol of the parallel-con-
nected inverters primarily uses the frequency droop and output
voltage droop to control the outpat power of the inverter.
‘A block diagram of the conventional droop control is shown in
‘ig. 8. Moreover, the equations of the droop characteristics of!" ~
and Q~£ in Fg. (a) and (b) can be waitten as follows:
mali @
By = Et mq o
where Thy Ors me: and ne are the reall active power output, eval
reactive power output, frequency droop coefficient, and voltage droop
coeficent ofthe K™ inverter, respectively. Purthermore, «fs the rated
frequeney, and £* is the rate voltage amplitude. The frequency and
‘voltage droop eneficent are designed from Eqs. (3) an), follows:
me
Fe ©
_ ar
Ora ©
where Aw and AE are the maximum allowed deviation of frequency and
voltage, respectively. Fem td Oka are the nominal active and
active power supplied by the system, respoctively.
Esinio)
ig. 3. Bock gram feet dep contr
Tnereasing the droop cneficents results in good power sharing but
degraded voltage regulation [25]. The inherent trade-off of this
controller is the selection of the droop coefficient value, The main
advantage of the droop control technique is its avoidance of extial
‘communication inks among paralle-eonnected inverters. The absence
of communication links between parallel connected inverters provides
significant fleibility and high reliability [26], However, the conven-
tional droop technique has several drawbacks [27-0], such as slow
transient response, inherent trade-off between vollage regulation and
load sharing, poor harmonie load sharing between paralle-conneeted
inverters in the case of nor-linear Toads, Tine impedance mismatch
between parallel-connected inverters that affect active and reactive
power sharing, and poor performance with renewable energy re
3. Virtual impedance loop-based droop control
“The conventional droop control cannot provide a balanced reactive
power sharing among paralle-onnested inverters under line impe
‘dance mismatch, Therefore the imbalance in reactive power sharing is
a serious problem in an AC microgrid. Several studies have achieved
balanced reactive power sharing implementing virtual output impe-
ance in droop control method through a fast control Toop which
emulates the line impedance (Wg. 6) 31,32]. Thus, the reference
voltage from each inverter can be modified, as follows
Mga WE-%
o
Um Taga ea
Renewable and Ssnabe Brergy Reviews 76 2017) 717-727
ig. 5 (0) Heed modelos alpen an (2) Pha gi.
where Z, i the virtual output impedance,
“The equivalent model of virtual impedance and the phasor diagram
of Z, > Z, are illustrated in Vig. 5(a) and (b), respectively. The virtual
fulput impedance is generally selected to dominate line impedance
[99], Ths, the virtual output impedance ean be chosen through the
summation approach, in which balanced reactive power sharing is
achieved if the valtage drop from every inverter to AC bus i a fllows
(a
Woagt = Ca + Zala = Ving = Cn + Zan 6
Hence, Z, and 22 are the virtual output impedance of two parallel
connected inverters, Furthermore, Zand Zi are line impedance of to
Eines)
ig. 6 Vita ingame op dp cont.
parallel connected inverters, respectively,
In the summation approach, one virtual output impedance is set to
zero, and another virtual output impedance is set to emulate the line
impedance. Based on Ea. (8) and considering that one line impedance
is larger than another, that is, Z > Zz. which permits the selection of
Z q=0, and Hg. (8) can be simplified as follows:
Ly bo o
‘The value of the virtual impedance i reduced using the summation
approach, which minimizes the degradation of voltage regulation.
Reactive power sharing is improved if the change in outpat voltage is
‘markedly higher than the vollage drop aeross the line than the reactive
power.
8.4. Virtual impedance loop-based droop control for single-phase
inductive microgrid
Several droop control techniques have been proposed to overcome:
the limitations of the conventional droop control technique and
Improve the performance of paralle-eonnected inverters in DG sys
tems. In [35], an improved droop eontral is introduced in whic an
integral-derivative term and virtual output impedance using high
ase filter are added to the conventional static droop technique. This
technique achieves good transient response and effectively shares the
non-linear load. However, the suitable coefficients of an integral-
erivative term and filter gain are diffeult to choose. In addition,
vollage regulation is poor
Voltage regulation is improve by designing a controller using three
‘main loops, samely, inner, intermediate, and outer loops (36,371. The
inner loop is developed using a proportional-integral-derivative con
troller that can well-regulate voltage. Meanie, the intermediate and
‘outer loops are designed based on the droop control technique using a
Virtual impedance Toop. This technique provides proper transient
response and excellent active and reactive power sharing, without
frequency or amplitude steady-state deviations. However, the droop
control technique cannot avoid the initial carrent peaks and provide
the hot-swap operation
Tn [35,29], a modification of the droop control technique is
presented. This technique involves conteol method that uses adaptive
Virtual output impedance to achiov elective reactive power sharing. A
Um Taga ea
soft-stat operation is also included to avoid inital current peaks and
provide hot-swap operation. In addition, a current harmonic loop is
‘added to properly share the linear and non-linear loads. This loop is
often tested to consider different line impedances of two DG units
without considering the distinct power capacities ofthese DG units. In
[00}, an improved droop control technique using virtual complex
ypedance is proposed to consider the effects of complex Tine
dance, This technique provides excellent current sharing. and
minimizes harmonic circulating currents. However, Q sharing is not
presented.
“Another modified droop control technique thet uses voltage aapli-
tude droop loop with zero steady-state error control and virtual
impedance loop is presented in [41]. These loops are effective in
avoiding frequency deviation and improving the accuracy of the sharing
‘and control of reactive power. However, these loops can increase the
total harmonie distortions of voltage components. Therefore, in [42], 8
voltage amplitude correction method is included to improve the quality
of output voltage.
‘The proposed techniques in [512] ae implemented for islanded,
rmicrogrid, However, some cases of autonomous operation are required.
‘Thus, an enhanced droop control technique was developed in [3] to
achieve the autonomous operation of a paralleleonnected inverter.
‘This strategy can accomplish a tight P and Q regulation performance
and proper transient response
In (4446), an improved droop contol strategy is implemented in
parallelconnected inverters by including a virtual impedance loop,
feeder current-sensing loop, and a second-order general-integrator
scheme, The aceuraey of reactive power sharing and inability to
perform the time-derivative function are some issues of these strate-
fies, Furthermore, these strategies can achieve fast transient response,
improved current harmonic sharing, and lowest total harmonie distor-
tion of outpat voltage. Brabandere eta, proposed a virtual impedance
droop uulizing a virtual power frame transformation to avoid the
coupling between active and reactive power. This method provides
excellent voltage and frequency control as wel 2s mitigation of voltage
harmonies (47,48.
22. Virtual impedance loop-based droop control for three-phase
inductive mierogrid
In [49-52), another novel structure of droop controler utiizing
Virtual impedance loop is presented. ‘The proposed techniques ean
generally achieve accurate reactive power sharing and perform stable
‘operation of paralle-connected inverters. The virtual power transfor-
sation frame is another interesting structure to implement the droop
control with virtual impedance [55]. A transformation frame depen-
dent on R/X value of lines is used to calculate the virtual powers. The
P/Q is decoupled if the distributed system is purely inductive or
estimation of R/X value is known. Similar to [53], a virtual frequency
and voltage frame is proposed [454-50]. This strategy also effectively
decouples power control and enhances the system stability and
transient response. Ifthe line impedance of parallel-conneeted DG
inverters are mismatched, then the transformation angles will vary,
and the reference frame will not be synchronized. These phenomens
fare common drawbacks ofa virtual transformation-based controller,
3.3. Virtual impedance loop based droop contro for single-phase
resistive mierogrid
Droop contol for resistive line impedance that uses resistive virtual
‘output impedance and harmonic power-sharing loop is introduced
[57] and shown in Fig. 7. This strategy is based on P-F and Q-o droops
{ha afford. improved dynamic response and active power sharing and
often obtains automatic harmonic sharing. In addition, active power
Sharing can be further improved by applying new control algorithm
presented in [55]. The downside of resistive droop control is the
Renewable and Ssnabe Brergy Reviews 76 2017) 717-727
‘Stow
lg 7 Rest vital npn lop dr ot.
vitinting of Q share performance [59]. However, in (60), the reactive
power sharing isimproved by including the R-C virtual impedance Toop
ln the conventional droop control.
34. Virtual impedance loop based droop control for three-phase
resistive mierogrid
In (61,62), an enhanced droop control technique was designed by
ading a virtual negative impedance tothe conventional droop control
approach. The enhanced droop control technique ean achiove accurate
active power sharing although two DG units have different power
capacities. Furthermore, voltage double-loop control is added to avoid
voltage deviation caused by the P-E droop,
4, Adaptive and robust droop controls
“The conventional droop control involves several issues tobe solved,
such as Tine impedance dependency, inaccurate power sharing, and
slow transient response (63). Consequently, variants of the conven-
tional droop control have been proposed to address these problems.
41. Adaptive droop control
Kim etal, proposed the adaptive droop control strategy in 2002 to
considerably maintain the voltage amplitude with accurate reactive
power sharing (64). Tn this technique, the maximnm reactive power
(ace deawn from each unt i stored and compared with reference value
of reactive power Q,y. Ifthe maximum reactive power is less than the
roference value, then the vllage amplitude follows the traditional Q/E.
«droop equation. However, when the maximum reactive power exceeds
the reference value, then the voltage amplitude will become as follows
(ssh
B= EY 0 ~ mas ~ 0,0) ao
Hence, Q> Qror
“The basic concept of adaptive droop control i shown in Fig. 8. The
difference between the output reactive power Q and reference value of
reactive power Q,,i¢ utilized a8 an additional value to set the desired
voltage amplitude, When @ >Qq. the voltage amplitude turns from
lines 10 and 20 to lies 11 and 21. The maximum reactive power is
‘ored, ad mul Ones ~ Quy) is subtracted rom the voltage amplitude a8
constant value. Therefore, when Q becomes lower than Qr, again the
vollage amplitude doesnot revert to lines 10 and 20 but tofines 12 and
22. Tis phenomenon can be expressed as Eq. (1!)
B= B= nO ~ Msn Ont ay
Um Taga ea
Fig 8. Bac conerl of adaptive de conta
nti Bsintoy— a)
ig 9. ok gram fone oop ten with apie droop conta
ig. 10. Rt dp cont
4.1.1. Adaptive droop control for single-phase inductive mierogrid
‘The adaptive droop control is one of the interesting strategies
among several variations of the traditional droop control. Several
Sudies have proposed different approaches to determine the adaptive
AGroop coefficient in adaptive droop control. In [65], a sevond-order
fier and a modifad equation of voltage droop were adapted to
ove the reactive power sharing and transient response. In [66~
68, the adaptive integral loop technique was implemented to improve
power-sharing dynamic response and remedy the effects of line
impedance on cireulating current, but the control parameters are too
complex to determine, In (62), the adaptive droop parameters were
predetermined by calculating the microgrid impedance, This technique
ensures effective power sharing and reduces line losses.
4.1.2, Adaptive droop control for three-phase induetive mierogrid
1. Derivativeterm-hased Technique: The transient response of paral-
Rene and Sana egy Ravine 76 (2017) 717-
Esin(or=#)
Esin(ox=#)
Ielconnected inverters in DG systems is improved by including the
following derivative term in the adaptive droop contol in (70)
= og +H Pag) + bea
ay,
0,
Veo Me thd Or ~ snd) + ha Gh ax
‘The change in the output voltage of an inverter inereases the
power oscillation in transient conditions. Thus, adaptive transient
Gerivative drops are used in [70] to decrease power oscillation. In
[71], « modified derivative controler-based control technique is
presented to enhance the performance of the proposed controler in
[70] The proposed contol strategy equations that work ae defined
2s fellows:
Cs ding h
so = milling Ua) + hE = Be ay
He Oeng ~ OD +4 f Ons ~ Op as
In [72], another derivative-term-based technique is presented.
‘This technique ensures active damping of power osillation. In
addition, this control strategy yields the desired transient response
toavoid the circulating current under different operating conditions.
‘The equations for frequency (Eq. (12)] and voltage (Ea. (13)] droops
based on the derivative term in [72] are defined as follows:
Hom? — me + m2
ee em mag, + ey a6)
ao.
Wem Ve = 0+ mE — mg
an
In addition, the proposed contro! method decreases the oscilla
sen ra a een Sele Deg Rakes 6207) 717-727
2000
1500
E 000
z
500
—Canvenional Droap Convenor Bro6p
rua! Impedance droop Vial impedance Groop
° Adaptive Boop. ° ‘Adapve Bro.
0.00 002 004 006 008 0.10 ow 0.02 0.04 0.06 = 0.08 0.10
Time (6) Time(s)
® ®
200
200
150
. 10
£ =
zm 5 0
80 ‘Conventional Droop: 50, — Conventional Droop
Virtual impedance Droop — Virtua impedance Oroop
5 Adaptive Doo ° —Adaptve broop
0.00 002 004 006 008 0.10 o 0.02 0.04 0.06 0.08 0.10
Time (6) Time (8)
ie) (d)
4000
3600 380,
3000 200,
E 2500 3 200
¥ 2000 p=
a! 1500 of 10
‘ 100
000 ‘Conventional Droop — Conventional Droop
500. Virtual Impecance Droop| 50: — Virtual Impedance Droop,
3 Adaptive broop ° — Adaptive broop
too 002008 008 008 010 doo ob2 004 008 008 010
Time (6) Time(s)
fe) (U)
tion frequencies and stable power-sharing performance. However,
power sharing ean be improved using the proposed strategy in [73],
as depicted in Fig 9
2. Algorithm and Optimization-based Technique: In [74], an algorithm
Js presented to modify the adaptive droop cocllcient based on
operating conditions. This technique can improve the active power
sharing but does not consider the reactive power sharing. An
algorithm to achieve a good reactive power sharing is presented in
[75], However, this algorithm is complex and sensitive to parameter
tolerance. In (76), an optimization-based technique is proposed in
Which the control parameters are adjusted by compromising, be-
tween reactive power sharing and voltage regulation. The adaptive
‘droop constants were derived by solving a specific optimization
‘issue. In (77), the optimization-based strategy in [76] is presented,
but the adaptive droop constants are determined hased on a small
signal analysis ofthe system, ‘Tis technique improves the stably of,
the microgrid operation. However, the power sharing performance is,
not presented. Power sharing is improved using the genetic algo-
wa smc el es 9297-7
s00 500
10a 48
49.6. 496
2 =i
ee Eas2
= 492 [Conventional Droop 2 Conventional Droop
49.0. ‘Virtual Impedance Droop 42.0: irtual Impedance Droop
(Cote Drop tee eave Ga
ea te
488 484:
000 ab ah obs ob aie «om aka abe ads obs OT
Tino) Tiree
fa tb)
Wo rege a
sith prt compete srt (and nie age peer yan,
swarm optimization [80] to obtain the adaptive droop coefficient, x KE @)
but the improvement isnot significant.
8. Theory:based Lechnique: The bifurcation theory is used in [81] to
schedule the adaptive droop eoeficient. The Kuramoto ossllator
nor-inear model for determining the optimal droop constants is
presented in [82]. These approaches can improve voltage and
frequency regulation, as well as produce slable operation in certain
cases, However, both approaches are only verified through simula-
tion,
42, Robust droop control
“The robust droop control is aso proposed 1 i
limitations of conventional droop control,
42.1. Robust droop control for single-phase resistive microgrid
“The conventional voltage droop can be rewritten as follows:
AR = b= ET= nb.
as)
where AF is zero under grid-eonnected mode [83]. However, AE
cannot be zero for islanded mode, because the active power could not
be zero. Another problem isthe voltage drop caused by the droop and
Toad changing elects, Small voltage drop ean he achieved by selecting
‘smaller droop coeficient. However, a larger droop constant need to
be selected to achieve fast response. The voltage drop can be obtained
by adjusting &° ~ V, by a ceriain way through besie principle of control
theory. ‘This strategy is accomplished using the improved droop
controller presented in [4], and the strategy i also known as robust
Groop control. This technique is a control strategy that modifies the
Aroop equation by deducting the RMS of the inverter output voltage
from the voltage set point as shown in Hig. 10. This method
compensates the voltage drop because of the droop and load effect.
Purthermor, it maintains the load voltage within the rated value but
with poor reactive power sharing. The robust droop contral ean be
expressed as follows:
B= KOE ya, a9)
waa" + mg. eo
1m steady-state form, Bq, (1®) ean be rewritten as follows:
nh = Ki" = Ve. en
‘The output voltage can be obtained using Eq. (21) which is
Aeseribed as follows:
where nP/.E%s the voltage drop ratio and can be chosen within the
required range by selecting large A, The right hand side of Eq (21)
willbe same for all parallel connected inverter, as Tong asthe same, is
selected, which guarantees proper active power sharing, The robust
droop constant m and n are ealeulated using Eqs. (28) and (24), a8
follows:
es
en
“The sstive power sharing error is inversely proportional to a/K, and
voltage drop is directly proportional to n/k.. For instance, the vltage
Arop at rated power is PIKE"=8%, and the error in the RMS voltage is
BIE 05% Then, the ervor in the active power sharing is
KE*NeS OE 25%, which is sccetable
42.2. Robust droop control for single-phase inductive mierogrid
Shuai et al, proposed a robust droop controller for single-phase
inductive microgrid [85]. This controller considers the impact of line
impedance and designed base on signal detection on the high voltage
side of the coupled transformer [85]. This strategy can improve voltage
regulation and significantly mitigate the line impedance impact on
power sharing. McFarlane H infinity synthesis method [86], universal
oop controller theory [87,88], smallgain theorem and hounded
droop controller theory [89,90] have been applied to robust droop
control to ensue stability, yeld high robustness, frequency and voltage
regulation, and improve the reactive power sharing, In addition,
bounded droop controller theory based on robust droop contral ean
Yield high load sharing during linear and now-tinear loads
5. Simulation and results
After reviewing the different droop control techniques, we per-
formed a comparative analysis among virtual impedance loop-based
Gran
rae.
1m Taga oo
imetal-oxide-semiconductor fieki-fect transistor (MOSFET) full
bridge with a switching frequency of 4000 Hz and an LC output filter
‘withthe fllowing parameters: L=1 mH, C=20 uF, and V,=250V. The
rated vollage and system frequency are 118V RMS" and 5012
respectively. However, the line impedances are 7;=0.12+0.028 and
Z-0.24+40.046,The droop coeicients mand ms are 0.0008 rad/W.8,
while»; and n, are 0.001 V/VAr. The droop eoeliients are the same
for conventional droop control, and virtual impedance loop-based
Groop control. However, the concept of design and calculation of
virtual impedance proposed by the authors of [37] is used to simulate
the virtual impedance loop-based droop control. Aecording to (7)
the equation for calculation of virtual impedance is expressed as
follows:
= bd es)
ased on Eq, (25), the value of virtual impedance for the given
system parameter is /, -J0.010.'The eoneept of adaptive droop control
presented by the authors of [73] is chosen for the simulation. The
adaptive droop constants: mem, musty» and n, ate 0015 W/rad,
(0018 Wis/rad, TAI Wrads, 0.0004 Var/V, and 0.5 Vars/V,
respectively,
“The simulation result in Vig. 12 shows the waveforms of active
Po Pp) and Feactive power (Qs Os: Ons) Of two. parallel-con-
pected inverters and load, which were obtained by applying conven-
tional droop control, virtual impedance oop-based droop control, and
adaptive droop control, It ean be seen from Hig, 12 that the virtual
impedance loop-based droop control and adaptive droop control
minimize the effects of impedance mismatch and improve power
sharing compared with the conventional droop control. In addition,
the adaptive droop control provides the highest active and reactive
power among the simulated techniques. Fig. 13. depets the frequency
restoration of two paralleleonnected inverters. As seen, the virtual
Impedance Toop-based droop control and adaptive droop control
achieves good frequency restoration of two parallel-connected inver-
ters, while the conventional droop control results ina static frequency
deviation,
Von
6. Discussion of different methods and future work
From the previous diseusson, it can be concluded that each of the
proposed control strategy has its own characteristics, advantages,
Grawbacks, and applications. The droop control techniques are based
fon local measurements of network state variables. These variables
totally distrbute the DG and provide redundaney, because they avoid
critical communication link for reliable operation. The absence of
‘communication link provides high flexibility, expandability, modular-
ity, and redundaney. In contrast, the conventional droop control
isplays several drawbacks, and these issues are listed in Table 1.
Different variations, such a5 virtual impedance loop-hased droop,
‘adaptive droop, and robust droop, have been proposed to overeome
the limitations of conventional droop. The virtual impedance loop-
Inased droop control can provide accurate reactive power sharing
‘among paralle-connected DG inverter. However, ths control presents
some limitations, such at degradation of voltage regulation and
Increase in no load voltage. The adaptive and robust droop control
method provide excellent voltage regulation and reactive power shat
ing. However, these methods result in poor active power and load
harmonic sharing
“Therefore, based on the overall discussion on the contol strategies
for an AC microg, reports on the fallowing topics can resolve the
presented issues
‘# Harmonic Toad sharing: Droop control methods guarantee accurate
active and reactive power sharing in case of nonlinear load.
lowever, desited harmonic load sharing cannot be achieved from
Renewable and Ssnabe Brergy Reviews 76 2017) 717-727
previously proposed methods, ‘Thus, these methods ean still be
improved farther.
Stability issue: Existing droop control methods cannot achieve
system stability in case of complex loads, such as induetion motor,
clectri vehicles, and pulsed loads. Thus, control strategies should be
Proposed to solve the frequency, voltage, and power angle stabilities
for these complex Toads
‘Trade-off between frequency and active power sharing: ‘The re
viewed droop control strategies cannot mitigate the trade-off
between frequency and active power sharing. Thus, a hybrid droop,
control method can be derived to resolve this issue
Integration of renewable energy resources: The droop control
‘method has poor performance with renowable energy resources,
such a5 photovoltaic and wind turbine, Existing. droop control
‘methods can be modified to mitigate this problem,
Conclusion
this paper, a comprehensive review of recent studies on droop
control technique is presented and discussed. Based on the preceding
discussion, the variations ofthe droop control technique eliminates the
Inherent limitations of the conventional droop control (Le, effect of
mpedance mismatch on active and reaetive power sharing, frequency
oviation, and dynamic response). In addition, the review shows that
adapting a single contro strategy forall applications or improving the
weakness of conventional droop control by one variation is difficult.
However, a deep understanding of the variations ofthe droop control
technique can help to address their weaknesses and enhance the design
and implementation of a mierogrid. Basic simulation results are also
presented to support the analysis. Furthermore, the different droop
control methods are summarized in Table 1.
References
11) caret Bt ec mdr riiyi ine wri of cece
‘ome enacts HE Pom Ces Sut Regal Pap 2004 RIAD
«2 ids DK we Vaan of CERT mrs ont he CECICERTS
‘Nero edie Un Proce of he 2000 IEEE power cosas ety
cr ect 2
Tei tet tary management in
‘Strain dnp soto ere
55, eal el orgaion raiy of over stents ai api in
‘Sipuon eta nate: a Sl ASUS
SLT thraneca Gono miroir Paling of he
2am cere on vain rom energy HCAGER 2014 1
‘Cote Rt anette nergy anaes the CERT ied
‘cep CBR Rep 902
‘Romeo R Rahman 5 Two op cotntle msntingperormann of
‘Pulcomcelpotoaatfoo eo hy power Han TRE Tans Ear
Lasseter, Viagi P. Providing premium power through distrted resources. I:
Feckageie Sed rent ave reson nieve gan
ate ovat Rover management sme for mio wth ice
‘Saute eat sie IEEE rs Power vt 206311
Fag ont htm trl cai Ping he
200 EEE pec ning iy pone meting 2006.
Ing ot A Sy on oa gl iyo pe ew ad 8 we
‘pra Ree Stain Eno Rev 2011154818" 2
{Gace 6, Manca. Dette mal geet = compceaie ver
1 an Arte pes eon tater power tend
‘cera pert tts oping ow sage tins ua
Tran owe Hs 20:28 2977-8
(aks Oy of mre a iaverte-dominatd ie wis igh shar of
erie co aed Unery Ps 205
‘inc ca Asmat orl mero with Dik wage
onto EEE Troe Rome Dy 201126098
Mohd a Review feral tegration. st
Power St Ro sol 147
ea Mt Dyan aby of pone tens wh we detec
Ds Pemeig of th 206 EEE ES pe se fee al
somes rgd wing sai
Trane Power ton
1
‘1
nm
v1
00)
un
2
ua)
a
us,
un
1m Taga oo
{08} Str 0; lng WL nga fd yeti on owe ers
‘rama sit Pec he me grag ty mer
‘Sting 200 ERE Ve 2 2p. el.
OO mete itil ms inl gl ADIT
{20} Kawabata, Heashino 8. Parl operation of wultigesoare invertors. IEEE
‘er nd Apt 262-7
(21) Gamnar Mc, tal. Cont fpr conse riers in stnsine AC
(23) Seat Muro tea tn one col
(nigga pire ital urs bap he Pov pt an
(201 Dal Mt a Power fw contra of singlet pneraon wi with
tert ak rte ope pte one
‘Spi Soot a as WoT ot py: St,
(20) Mr Deprorented sabe of modern ate drop-eontrll power
‘Sp ost ren yO 8
251 Tundra Fra opr fing pe itr modes wih 0
ont nteconesns ty Fees fe IEIPAPECY? eonfrece. 197
(20) Besar Me, Dinan DM, Detain eatin oie U8 yde
in Preis th 199 tron teens on poe etn Oe
teers stems rth V1 198 36571
ta Gucwersht al Marre eon of ropa Deal AC gs
palpate tuedton Pring of eth ma
Soease ot THE nial dct IBCON T2909. 190-410
(28) Guar a Drop ore sate fo th ral operon bie
ae pee pleat dnt te roengat
{SET ple east cnr eqpnon AEE) 2008p
(20) Rua tl Genera ass hacia cont and dhonp mets
‘Sip anv Ren Sana ney as 908 9107 38
(20) Feel, sa UP purl wl son wat le tintin of
tev pow A simple che HE oC tag Bes
(51) Skins al, tat sharing fr pre verte wit commento,
Dering tc Nee kangen pero el ros 202
{82} hung Gy el el srl ay rel one cers i ie
‘shag: igi Frnt of ie ak caine ten on bp
{Sion dessin Ata cic (C ae Poe 204 pp.
(23) Meath ota ean: poner svn eget tron
Compensation of dog onl ie as andl snr EEE Tran
Son nd sovapuite a
(24) Rome GX tal Iingleoeaing he vita ep inedeneap hee
‘Hattingen ctor ag flee er
‘Serafina cae: Prong fhe it open eae oe
owe cress apes (EPEL 3013 pp. 1-0.
(25) Ewin eu wit conta tonite dpm peromance
tora ivr pemraon aes TEEE Tram Poe Hs
136) Guerrero JM, ea, Output iapedance performane: for parallel operation of UPS.
‘Soong wierd ag cote cig eis rns
{BoE So cone! poner Cater pas etree PINE OV |
20%, pp 222
(37 Goatees impace digs pre cmon invtes
‘tne hag cotta TE Ts Bon S066 a
tan) Gueweo at ca Wires ate fr pu pra of rt
ema ers EEE Tram nd Hacon DoS 1001 7
139) Gaeeo Js Winder sie for parse pation of dtd
‘roca rice, Proce of he IEEE mers sagen
‘Sura ectoncs th 20. 2.205, pp. M850
(40) Yorwiets bg nl lathe np ated prints
(easy the eres spc pov Sag ESE
41) Zhan Pe al An improved reactive power conta strategy foe inverters in
‘mig i: Peering oft TRE crane roe
‘Sets SHE 2003 pp. 1H
(42) Scher ea Conlon ay of dopant inverter bse
‘ncn arte 3014503457 0
4s) Guero Jt Cort Say or Pee Mcrae Pre ne
intend US Stems IE Tt od te 2-9
(neo iinet gc ee
45) Zam ¥ tA wireless lod sharing strategy for handed micogrl asl on eer
‘St eng IE Ta Re Heron 201500718
{46} Soa Via mpesnce op fr dp cota gl phase peal
‘Sr niga eer pol ogc ree I Ts Ret
‘aan S01-098- Sa
4rd RD, 1A wlge a onc dup cnta mtd for pr
[svn TEE Tan oe Bec 200722100818,
(48) Bruner KD, Ala ap ep conte ore
ives hs Peeing ote THEE 3 sol poner ns eit
(Stlnens FESEO1 Vo 42004, pp 250-2507
(09) tenga An ean ro Stra sche fo dd ai at
‘Sane ones 70
(30) Sea Aner mt sate doting dren cont with vi
Renewable and Sana rergy Reviews 76 2017) 717-727
Indctance in miro. ngicring 2154-9
(51) Hes, 1. Andy das, end implementation of vital npc x power
eros nerfed died serra IEE Tras lad Apa
(52) Wang ta Am improved des of il otpt impotance op fr dcp
control the phase vag re iets 2012 IEEE Hare Covers
‘ange Hap (HCC) 2012245673,
(58) Lec CT ca Corl seis drut enery resources inerfce
ei th ow sage Meg 2091 ary Caer Cane Ea
(6A) 12, 1: Deon power at ran verter bal Tow ata micro
Ses ers ing rir cet pla fe aad ee
1) Aci Mot Dg of controller active pone sharing highly eve
teri IRC-Pap 2015
(59) Vanden Th wt al Asta power sharing moicain of dp contr i
[Tai Sess PAX improved dro onto or par pratin of
sin pane verter sing RC tel pean Ie Pring Ue 2012
IEEE tena! eolerece on power dec, tesa energy tems
(rapes) 2002 pp Is
(6) ang a a taal mtd ratieotpu impede fr per sharing
‘Seip overt in reer Preceding he itera
‘fee on pes ltr ad FECT Ae (CPE ECCE) TERE 201
[62] Ho Ge Vit megtve impalane wo mato for pare eters in
‘cope: Proceso Un Proce of ie OU coment
‘Sheree nd appatons (ICTEA), TEBE 205. p. 1009-101,
69) Vancr Joa Nalige apport povided by» dream malfunction
Inter. KE Trans tbd eto 209564810-9
[6A] Kim 1W; ea Aneel dep aod lor convetr pra peat. EEE Trans
Power Hictron 2002170325 22.
‘Yanga Sayan the contra strategy for par operation fiers se
‘ona dep meh: Praise IST TERE entero
{nna drones an plato 2100 pp 1-5
(66) Yao Wet dh Deveopnant communicate tap paral fr single
phan PS Inverse om ape dsp mtd. nr cen the
‘ety: furth anal IEEE appli power tones conferees a option,
AATEC 2000, p. 1280-1287
(7) Wes eta A tins sharing conta to improve the prormance of
‘ral
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5811)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 000 - Solar Photovoltaic Generators With MPPT and Battery Storage in Microgrids-File Exchange - MATLAB Central PDFDocument20 pages000 - Solar Photovoltaic Generators With MPPT and Battery Storage in Microgrids-File Exchange - MATLAB Central PDFTrần Quang TuyênNo ratings yet
- 15PPM Ocd CM PDFDocument4 pages15PPM Ocd CM PDFTrần Quang Tuyên100% (1)
- SDNL He Thong-ModelDocument1 pageSDNL He Thong-ModelTrần Quang TuyênNo ratings yet
- C2 HTNLX Vd.5 2019 HK201 6sDocument76 pagesC2 HTNLX Vd.5 2019 HK201 6sTrần Quang TuyênNo ratings yet
- Flexible Coil Current Transformer Installation GuideDocument19 pagesFlexible Coil Current Transformer Installation GuideTrần Quang TuyênNo ratings yet
- Table Soccer Basics enDocument12 pagesTable Soccer Basics enTrần Quang TuyênNo ratings yet
- Electric Power System Inertia: Requirements, Challenges and SolutionsDocument19 pagesElectric Power System Inertia: Requirements, Challenges and SolutionsTrần Quang TuyênNo ratings yet
- HSY-25 T5: Hs - Stationary Range Standard SoundproofingDocument6 pagesHSY-25 T5: Hs - Stationary Range Standard SoundproofingTrần Quang TuyênNo ratings yet
- Service Parts: Industrial Generator SetsDocument108 pagesService Parts: Industrial Generator SetsTrần Quang TuyênNo ratings yet
- Smart Inverter Technology ForDocument27 pagesSmart Inverter Technology ForTrần Quang TuyênNo ratings yet
- Energies 12 01826 PDFDocument6 pagesEnergies 12 01826 PDFTrần Quang TuyênNo ratings yet
- Operation & Maintenance ManualDocument112 pagesOperation & Maintenance ManualTrần Quang TuyênNo ratings yet
- SC SCS US GridServices TI en 11Document16 pagesSC SCS US GridServices TI en 11Trần Quang TuyênNo ratings yet
- Sma Grid Guard 10.0: Technical InformationDocument52 pagesSma Grid Guard 10.0: Technical InformationTrần Quang TuyênNo ratings yet
- 200711-Bao Cao BTL Ky Thuat Cao Ap Nang CaoDocument25 pages200711-Bao Cao BTL Ky Thuat Cao Ap Nang CaoTrần Quang TuyênNo ratings yet
- 20190226-Solar Permitting Guidebook 4th EditionDocument114 pages20190226-Solar Permitting Guidebook 4th EditionTrần Quang TuyênNo ratings yet
- Certificate VDE IEC61215 61730 enDocument66 pagesCertificate VDE IEC61215 61730 enTrần Quang TuyênNo ratings yet
- 000 - Coordinated VF - PQ Contl of PV Gen W MPPT and Battery Storage in MicroGrids PDFDocument12 pages000 - Coordinated VF - PQ Contl of PV Gen W MPPT and Battery Storage in MicroGrids PDFTrần Quang TuyênNo ratings yet
- Power Systems Kohler PowerDocument28 pagesPower Systems Kohler PowerTrần Quang TuyênNo ratings yet
- Đề cương luận văn-Tran Quang Tuyen 07-2020Document11 pagesĐề cương luận văn-Tran Quang Tuyen 07-2020Trần Quang Tuyên100% (1)
- 000 - PV Generators W MPPT and BESS in MicroGrids PDFDocument12 pages000 - PV Generators W MPPT and BESS in MicroGrids PDFTrần Quang TuyênNo ratings yet
- Limited Warranty Statement Photovoltaic Bifacial Module ProductsDocument5 pagesLimited Warranty Statement Photovoltaic Bifacial Module ProductsTrần Quang TuyênNo ratings yet