You might also like
- Minidiag2 EDocument61 pagesMinidiag2 EJorge Alvarez Fernandez100% (9)
- Step Manual F5021 PDFDocument66 pagesStep Manual F5021 PDFlac71% (7)
- Jarless Con Door DriveDocument16 pagesJarless Con Door DriveRoyal Akash100% (6)
- HHT Parameter (Finished) 0227Document10 pagesHHT Parameter (Finished) 0227Rachmad Maulana Ramadhan83% (6)
- KLS-MCU Main Circuit DiagramDocument29 pagesKLS-MCU Main Circuit DiagramSatis100% (5)
- Manual Ouling Vf200Document5 pagesManual Ouling Vf200Yok Mulyono67% (3)
- KOYO Escalator Mainboard Manual BookDocument36 pagesKOYO Escalator Mainboard Manual BookFranklin Palacios86% (7)
- PMSM Door Drive User ManualDocument29 pagesPMSM Door Drive User Manualtach2553100% (3)
- NSFC01-02 SM01A (English)Document57 pagesNSFC01-02 SM01A (English)Madiha Maroof100% (13)
- PDF Created With Pdffactory Trial Version: Cl1 Ch1 L1 H1Document19 pagesPDF Created With Pdffactory Trial Version: Cl1 Ch1 L1 H1Heiner Hidalgo100% (3)
- (D10D626,634,634 F Manual 2017.V1.0Document136 pages(D10D626,634,634 F Manual 2017.V1.0Carlos Contreras93% (15)
- Winone Elevator Connection DiagramDocument40 pagesWinone Elevator Connection DiagramMuhammad Rashid75% (4)
- Sakura SCH568Document52 pagesSakura SCH568jacky100% (2)
- Ife CTRL71 Commissioning Manual (V1.0-0303)Document52 pagesIfe CTRL71 Commissioning Manual (V1.0-0303)Edhimj Unme100% (3)
- HD 050 Slidebar ManualDocument50 pagesHD 050 Slidebar ManualMarco Vinicio BazzottiNo ratings yet
- Elevator Weight Controller ManualDocument11 pagesElevator Weight Controller Manualabdul100% (2)
- Panasonic AAD03061Document9 pagesPanasonic AAD03061Nguyễn ThànhNo ratings yet
- Ningbo NBSL Nsfc01 01 Control System 4sw PDFDocument14 pagesNingbo NBSL Nsfc01 01 Control System 4sw PDFAzhar Hussain100% (1)
- AS320 Series Elevator-Used Inverter User Manual V2.09 PDFDocument170 pagesAS320 Series Elevator-Used Inverter User Manual V2.09 PDFMohammad Kazim100% (4)
- X-Mini 5V: Instruction of Operating Manual of Service/Restaurant Elevator Control SystemDocument12 pagesX-Mini 5V: Instruction of Operating Manual of Service/Restaurant Elevator Control Systemmohammad ghassan100% (3)
- Binder 1Document140 pagesBinder 1tran xobon100% (4)
- WTVF-VF1-V1.1-5 document circuit diagramDocument29 pagesWTVF-VF1-V1.1-5 document circuit diagrambakriramzi67% (3)
- 2.wiring Manual AS380-17256008957538852032 PDFDocument28 pages2.wiring Manual AS380-17256008957538852032 PDFThaw Zin100% (2)
- D10D622 Drive CircutDocument31 pagesD10D622 Drive CircutVertec Engineering0% (1)
- Sigma DCD230 ManualDocument15 pagesSigma DCD230 Manualcarla monic dialino100% (3)
- FUSION Integrated Control SG-01-0003 B2 PDFDocument179 pagesFUSION Integrated Control SG-01-0003 B2 PDFraga tamaNo ratings yet
- PESA CARGA DTZZIII-DK100系列说明书英文Document6 pagesPESA CARGA DTZZIII-DK100系列说明书英文NelsonEnrriqueInfante100% (2)
- Wiring Diagram Elevator: 123/INDSBY-ELC/1014Document22 pagesWiring Diagram Elevator: 123/INDSBY-ELC/1014Gogik Anto83% (12)
- DCC++ Arduino SketchDocument3 pagesDCC++ Arduino SketchPaulo Cesar Santos DiasNo ratings yet
- Flask RestplusDocument86 pagesFlask RestplusMuhammad IqbalNo ratings yet
- Prentice Cplusplus For Java Programmers 013919424XDocument290 pagesPrentice Cplusplus For Java Programmers 013919424XBob Williams100% (1)
- Controller ARMDocument25 pagesController ARMWahyu SetyawanNo ratings yet
- Canny Instalacion Mecanica Manual InglesDocument57 pagesCanny Instalacion Mecanica Manual InglesBeltran Héctor100% (1)
- 标准版供电装置hcyd22 Xx Ag2说明书4.70 Tdgk Vr1.1板子英文 单相Document7 pages标准版供电装置hcyd22 Xx Ag2说明书4.70 Tdgk Vr1.1板子英文 单相mohammedalathwary100% (1)
- 3000 MRLDocument23 pages3000 MRLNguyễn Thân100% (1)
- S50-E6 Elevator Control System Commissioning Manual (2017.12) - Ae4Document56 pagesS50-E6 Elevator Control System Commissioning Manual (2017.12) - Ae4Yesid Castellanos Triana100% (2)
- Sm-01-Cda User Manual V1.0Document96 pagesSm-01-Cda User Manual V1.0Daud Jiong KIM100% (4)
- Canny DiagramasDocument24 pagesCanny DiagramasHeiner HidalgoNo ratings yet
- NICE1000new Integrated Elevator Controller User ManualDocument205 pagesNICE1000new Integrated Elevator Controller User ManualVinay SharmaNo ratings yet
- User Manual For DS Range D T VER 1 3 Products VER. 1.3Document56 pagesUser Manual For DS Range D T VER 1 3 Products VER. 1.3tran xobon50% (2)
- S8 Series Elevator Intergrated Controller User Instruction V3.3Document186 pagesS8 Series Elevator Intergrated Controller User Instruction V3.3Nguyen Vuong100% (3)
- 2010 New Electric Drawing-FUJI YIDA - 1Document16 pages2010 New Electric Drawing-FUJI YIDA - 1oro plata100% (1)
- Manual Nice900Document99 pagesManual Nice900Yok Mulyono0% (2)
- 《NICE5000 Integrated Elevator Controller User Manual》-英文 - V0.0 PDFDocument233 pages《NICE5000 Integrated Elevator Controller User Manual》-英文 - V0.0 PDFEmad QwareeqNo ratings yet
- 门机控制器说明书 Door Operator Controller Instruction ManualDocument15 pages门机控制器说明书 Door Operator Controller Instruction ManualHeiner Hidalgo100% (2)
- EWD-RL-J2 Elevator Device ManualDocument12 pagesEWD-RL-J2 Elevator Device Manualmohammedalathwary100% (4)
- Hosting Manual InglesDocument57 pagesHosting Manual InglesEdgar Zamora67% (3)
- BL2000 Elevator Control System Wiring DiagramDocument28 pagesBL2000 Elevator Control System Wiring DiagramAnderley Quintero100% (1)
- BLT MPK708CDocument185 pagesBLT MPK708CFabian Garrido100% (2)
- Sicon-3000Kci Manual: Samil EltecDocument80 pagesSicon-3000Kci Manual: Samil Eltecthanggimme.phanNo ratings yet
- ME320LNnew Elevator Specialized AC Drive User Manual 20151030Document158 pagesME320LNnew Elevator Specialized AC Drive User Manual 20151030andre carrion100% (1)
- Number: SJG 08-007: (Electrical Parts)Document49 pagesNumber: SJG 08-007: (Electrical Parts)Tadeo Benegusenga40% (5)
- 《MCTC PES E1扶梯可编程电子安全系统用户手册》 英文+19010187 A01 PDFDocument47 pages《MCTC PES E1扶梯可编程电子安全系统用户手册》 英文+19010187 A01 PDFKs Bharathiyar100% (3)
- Manual-DESSEN (SM-01-F5021)Document114 pagesManual-DESSEN (SM-01-F5021)jose0% (2)
- HT34 Control PanelDocument19 pagesHT34 Control PaneljhfbtyNo ratings yet
- Sanyo Elevator User Guide Safety InstallationDocument158 pagesSanyo Elevator User Guide Safety InstallationAngel Iglesias100% (1)
- Ard TPS-25 PDFDocument7 pagesArd TPS-25 PDFNguyễn Thân67% (3)
- مخطط كهرباء فوجي اليابانDocument24 pagesمخطط كهرباء فوجي اليابانbassemalelwyNo ratings yet
- Monarch User ManualDocument90 pagesMonarch User ManualMoh Aya100% (1)
- AX SERIES LIFT CONTROL CARDS USER MANUALDocument14 pagesAX SERIES LIFT CONTROL CARDS USER MANUALSuleman Amjad75% (4)
- Microscan TempscannerDocument10 pagesMicroscan TempscannerGIRI100% (1)
- Weighing Indicator Serie Ipe 50: Short Guide For Calibration OnlyDocument16 pagesWeighing Indicator Serie Ipe 50: Short Guide For Calibration Onlybona INSTtechnicianNo ratings yet
- UDM 35/40 Digital Panel Meter Programming GuideDocument19 pagesUDM 35/40 Digital Panel Meter Programming GuideandreNo ratings yet
- Manual ATSC 1Document21 pagesManual ATSC 1gdiliogNo ratings yet
- IED670 Getting Started Guide: Mounting and InstallationDocument10 pagesIED670 Getting Started Guide: Mounting and InstallationunorulezNo ratings yet
- Brosur Byu LiftDocument16 pagesBrosur Byu LiftGogik AntoNo ratings yet
- Form Handrail 001Document5 pagesForm Handrail 001Gogik AntoNo ratings yet
- Yaskawa L1000A Lift Application Short EN ManualDocument41 pagesYaskawa L1000A Lift Application Short EN ManualGogik AntoNo ratings yet
- LiftUnit7 DocumentationDocument44 pagesLiftUnit7 Documentationangela1590No ratings yet
- WIRING DIAGRAM ELEVATOR PANELDocument28 pagesWIRING DIAGRAM ELEVATOR PANELGogik AntoNo ratings yet
- WIRING DIAGRAM ELEVATOR PANELDocument28 pagesWIRING DIAGRAM ELEVATOR PANELGogik AntoNo ratings yet
- Hotel Santika - Tmii 4LTDocument24 pagesHotel Santika - Tmii 4LTGogik AntoNo ratings yet
- Wiring PKU GMP 1Document1 pageWiring PKU GMP 1Gogik AntoNo ratings yet
- Inverter Pakuwon PDFDocument3 pagesInverter Pakuwon PDFGogik AntoNo ratings yet
- Graha Family G-12Document1 pageGraha Family G-12Gogik AntoNo ratings yet
- LiftUnit7 DocumentationDocument44 pagesLiftUnit7 Documentationangela1590No ratings yet
- Hotel Santika - Tmii 4LTDocument24 pagesHotel Santika - Tmii 4LTGogik AntoNo ratings yet
- AS380 Series Elevator Intergrated Controller User Instruction V2.09Document267 pagesAS380 Series Elevator Intergrated Controller User Instruction V2.09Güray ÖZÜERLER79% (14)
- Yaskawa L1000A Lift Application Short EN ManualDocument41 pagesYaskawa L1000A Lift Application Short EN ManualGogik AntoNo ratings yet
- AS320 Series Elevator Inverter: Publication Status Standard Product Edition V2.10Document180 pagesAS320 Series Elevator Inverter: Publication Status Standard Product Edition V2.10MD Omar FarukNo ratings yet
- Delta Ia-Mds VFD-M-D Um en 20090506 PDFDocument171 pagesDelta Ia-Mds VFD-M-D Um en 20090506 PDFGogik AntoNo ratings yet
- AS380 Series Elevator Intergrated Controller User Instruction V2.09Document267 pagesAS380 Series Elevator Intergrated Controller User Instruction V2.09Güray ÖZÜERLER79% (14)
- YASKAWA AC Drive L1000A: Quick Start GuideDocument64 pagesYASKAWA AC Drive L1000A: Quick Start GuideMohammad KazimNo ratings yet
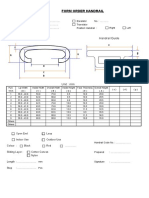
- Form Order Handrail: Handrail Guide Rail HandrailDocument1 pageForm Order Handrail: Handrail Guide Rail HandrailGogik AntoNo ratings yet
- The Customer Source InspectionDocument36 pagesThe Customer Source InspectionPrahant KumarNo ratings yet
- CS411 Grand Quiz by JunaidDocument25 pagesCS411 Grand Quiz by JunaidInformation everything50% (4)
- Dinkum C++ Library ReferenceDocument625 pagesDinkum C++ Library Referenceapi-3722217No ratings yet
- TL6500B User Manual-V1604Document49 pagesTL6500B User Manual-V1604AbiNo ratings yet
- Alexs Exam NotesDocument7 pagesAlexs Exam NotesAlex EdjiuNo ratings yet
- Dynamic Instantiation in C++ (The Prototype Pattern)Document6 pagesDynamic Instantiation in C++ (The Prototype Pattern)captain1213No ratings yet
- TMS TAdvStringGrid v5.0 What's NewDocument18 pagesTMS TAdvStringGrid v5.0 What's Newboypardede3552No ratings yet
- 800-0009-TN31 TransNav TL1 Reference GuideDocument490 pages800-0009-TN31 TransNav TL1 Reference GuideHome ManNo ratings yet
- Appendix A - Answers To Self Tests - Java A Beginner's Guide, 6th Edition PDFDocument32 pagesAppendix A - Answers To Self Tests - Java A Beginner's Guide, 6th Edition PDFArjunNo ratings yet
- Stm32f4xx Hal AdcDocument30 pagesStm32f4xx Hal AdcJawadNo ratings yet
- CS609 CURRENT MIDTERM SOLVED SUBJECTIVE by JUNAID-1Document9 pagesCS609 CURRENT MIDTERM SOLVED SUBJECTIVE by JUNAID-1Hamza KhanNo ratings yet
- BC400 ABAP/4 Introduction To The Development Workbench: Cover Logo Page BC400Document6 pagesBC400 ABAP/4 Introduction To The Development Workbench: Cover Logo Page BC400Dr. Amresh NikamNo ratings yet
- (Step by Step (Microsoft) ) John Sharp, Jon Jagger - Microsoft Visual C# .Net Step by Step-Microsoft Press (2002) PDFDocument663 pages(Step by Step (Microsoft) ) John Sharp, Jon Jagger - Microsoft Visual C# .Net Step by Step-Microsoft Press (2002) PDFGPCNo ratings yet
- CA2E BuildApps ENU PDFDocument669 pagesCA2E BuildApps ENU PDFomarNo ratings yet
- DriveWindow Light 3AFE68384575 en REVDDocument2 pagesDriveWindow Light 3AFE68384575 en REVDbakien-canNo ratings yet
- TeslaSCADA IDE UserManual PDFDocument386 pagesTeslaSCADA IDE UserManual PDFAnkhuong NguyenNo ratings yet
- Compactline: Operating and Installation InstructionsDocument37 pagesCompactline: Operating and Installation InstructionskeduseNo ratings yet
- Alice Textbook (Electronic Version)Document369 pagesAlice Textbook (Electronic Version)shopperhqNo ratings yet
- SQL Server DocumentationDocument135 pagesSQL Server DocumentationsudhaNo ratings yet
- Chap 3 WorksheetDocument4 pagesChap 3 WorksheetrajeswarikannanNo ratings yet
- Indira Gandhi National Open University: Lab Manual McaDocument54 pagesIndira Gandhi National Open University: Lab Manual McaPrashu YokiNo ratings yet
- Prog GuideDocument250 pagesProg GuideculebrasxxxNo ratings yet
- 1581 MMPP4300-FTDocument17 pages1581 MMPP4300-FTalex niño quintanaNo ratings yet
- Vf11 Cancel Not ClearedDocument3 pagesVf11 Cancel Not Clearedbinh0% (1)
- 3ADW000192R0401 DCS800 Technical Catalog e DDocument28 pages3ADW000192R0401 DCS800 Technical Catalog e DSunil singhNo ratings yet
- What is Perl programming languageDocument60 pagesWhat is Perl programming languageKhánh NguyễnNo ratings yet