You might also like
- MIT6 003F11 Lec06 PDFDocument38 pagesMIT6 003F11 Lec06 PDFIlhariri Muhammad IrlisNo ratings yet
- Signal and Systems Note7Document42 pagesSignal and Systems Note7Khaya KhoyaNo ratings yet
- 6.003: Signals and Systems: Z TransformDocument51 pages6.003: Signals and Systems: Z TransformM Arif KhabibullohNo ratings yet
- Chapter 4 &5Document52 pagesChapter 4 &5Ken MutaiNo ratings yet
- HW - Chapter 5Document2 pagesHW - Chapter 5Huy NgôNo ratings yet
- Rohini 33828822624Document6 pagesRohini 33828822624PRIYAL SINGHNo ratings yet
- Quiz4 Soln Es332 NRB F23Document2 pagesQuiz4 Soln Es332 NRB F23hamzasyed12098No ratings yet
- SBE I - Biomedical Data Science Course OverviewDocument4 pagesSBE I - Biomedical Data Science Course OverviewDavidNo ratings yet
- L4 1 LTIsys AnalysisDocument11 pagesL4 1 LTIsys AnalysisMohd Shadab AlamNo ratings yet
- Assignment 01 - 2017Document2 pagesAssignment 01 - 2017Lalita KaranjekarNo ratings yet
- Exercise Signal Processing 5Document21 pagesExercise Signal Processing 5Max PieriniNo ratings yet
- 3 Z TransformDocument12 pages3 Z TransformNitinNo ratings yet
- Tutorial 11 - Z-Transform (Exercises)Document2 pagesTutorial 11 - Z-Transform (Exercises)Taylor Andres Amaya100% (1)
- Z TransformDocument28 pagesZ TransformMoiz Hussain100% (1)
- Ztransform AppDocument5 pagesZtransform AppSyed Ali RazaNo ratings yet
- Tutorial 5 QuestionsDocument4 pagesTutorial 5 QuestionsMohamed QuoraNo ratings yet
- Z - TransformDocument62 pagesZ - TransformReo Rickie BatingNo ratings yet
- DSP Problemset PDFDocument6 pagesDSP Problemset PDFsixfacerajNo ratings yet
- B.Tech. III-ECE Digital Signal Processing Assignment No.1Document1 pageB.Tech. III-ECE Digital Signal Processing Assignment No.1evarghese_9No ratings yet
- ANALYTICAL TOOLS FOR DIGITAL SIGNAL PROCESSINGDocument4 pagesANALYTICAL TOOLS FOR DIGITAL SIGNAL PROCESSINGUchechi Chioma UgoNo ratings yet
- XII Math Ch2 Inverse Trigonometric Functions Chapter Notes AugustDocument6 pagesXII Math Ch2 Inverse Trigonometric Functions Chapter Notes AugustSaurabh DuttNo ratings yet
- Block Diagram Representation: Peter Avitabile Mechanical Engineering Department University of Massachusetts LowellDocument19 pagesBlock Diagram Representation: Peter Avitabile Mechanical Engineering Department University of Massachusetts LowellAnn RazonNo ratings yet
- NoteDocument37 pagesNoteHaryanvi ChhoraNo ratings yet
- EE5103/ME5403 Lecture Six Predictive Control: Solution To Tracking ProblemDocument44 pagesEE5103/ME5403 Lecture Six Predictive Control: Solution To Tracking ProblemFeiNo ratings yet
- Digital Signal Processing Course OverviewDocument31 pagesDigital Signal Processing Course OverviewRakesh InaniNo ratings yet
- Web Practice Exam 1Document11 pagesWeb Practice Exam 1Gnanaraj100% (1)
- 6.003 (Spring 2010) Quiz #1: March 3, 2010Document9 pages6.003 (Spring 2010) Quiz #1: March 3, 2010Johrdan SaAvdr WaLlsNo ratings yet
- Be Satt MaterialDocument3 pagesBe Satt Materialsravan_451No ratings yet
- Feedback Linearization ExplainedDocument14 pagesFeedback Linearization Explainedabhilash v nairNo ratings yet
- LTI Described by Difference Equations: Yn XK NDocument4 pagesLTI Described by Difference Equations: Yn XK NHavotAlbeyboniNo ratings yet
- Ece308 7 PDFDocument4 pagesEce308 7 PDFHavotAlbeyboniNo ratings yet
- LTI Described by Difference Equations: Yn XK NDocument4 pagesLTI Described by Difference Equations: Yn XK NMnshNo ratings yet
- ME 3253 Linear Systems Theory ReviewDocument30 pagesME 3253 Linear Systems Theory Reviewmohammed dowNo ratings yet
- Filter RealizationDocument67 pagesFilter Realizationemperorjnx100% (1)
- Sec. 1.6. Z-TransformDocument12 pagesSec. 1.6. Z-TransformMuhammad Adnan MalikNo ratings yet
- SolutionsDocument16 pagesSolutionsGrason Bautista MinguezNo ratings yet
- Template Chaos CircuitDocument14 pagesTemplate Chaos CircuitEnrique PriceNo ratings yet
- Z-Domain: by Dr. L.Umanand, Cedt, IiscDocument31 pagesZ-Domain: by Dr. L.Umanand, Cedt, Iiscleoh1223No ratings yet
- Inverse Trigonometric FunctionsDocument2 pagesInverse Trigonometric FunctionsArman SinghNo ratings yet
- Signals and Systems Assignment ProblemsDocument2 pagesSignals and Systems Assignment ProblemsDeepa JerinNo ratings yet
- Difference Differential Bonus SolsDocument6 pagesDifference Differential Bonus SolsAmreshAmanNo ratings yet
- Tutorial 4 QuestionsDocument2 pagesTutorial 4 QuestionsMohamed QuoraNo ratings yet
- Practice+Exam - 3 - Answers DSPDocument24 pagesPractice+Exam - 3 - Answers DSPminersrevoltNo ratings yet
- Tutorial 2 2018Document2 pagesTutorial 2 2018Cornelius DhliwayoNo ratings yet
- Bilinear Mapping of Analog Filters to Digital FiltersDocument33 pagesBilinear Mapping of Analog Filters to Digital FiltersHarold GealanNo ratings yet
- Affine Processes and Applications in FinanceDocument25 pagesAffine Processes and Applications in Financekarasa1No ratings yet
- 10 EMI 08 System Time Response CharacteristicsDocument15 pages10 EMI 08 System Time Response Characteristicsapi-3707706No ratings yet
- Transform Analysis of LTI SystemsDocument62 pagesTransform Analysis of LTI Systemshakkem bNo ratings yet
- Tutorial Sheet-3: H (z) has two zeros. H (z) has one of its poles at a nonreal location on the circle defined by ׀z ׀ = ¾Document2 pagesTutorial Sheet-3: H (z) has two zeros. H (z) has one of its poles at a nonreal location on the circle defined by ׀z ׀ = ¾Akshay GoelNo ratings yet
- DSP Lab 6 (Ztransform)Document8 pagesDSP Lab 6 (Ztransform)abdullah khalid100% (1)
- Queueing Theory FormulaeDocument1 pageQueueing Theory Formulaedrive semesterNo ratings yet
- Week 5Document23 pagesWeek 5Hòa VănNo ratings yet
- KOM 3781 Discrete-Time Control Systems: Veysel GaziDocument51 pagesKOM 3781 Discrete-Time Control Systems: Veysel GaziFatih CanbolatNo ratings yet
- Dwnload Full Digital Control System Analysis and Design 4th Edition Phillips Solutions Manual PDFDocument36 pagesDwnload Full Digital Control System Analysis and Design 4th Edition Phillips Solutions Manual PDFjacobwyisfox100% (14)
- DSP Week Two LectureDocument9 pagesDSP Week Two LectureKabo MphanyaneNo ratings yet
- EE322M Quiz-1 SolutionDocument6 pagesEE322M Quiz-1 SolutionshubhamNo ratings yet
- Domain & Range of Trigonometric FunctionsDocument2 pagesDomain & Range of Trigonometric FunctionsPiyushNo ratings yet
- Digital Signal Processing: Discrete-Time Systems Lecture - 4Document9 pagesDigital Signal Processing: Discrete-Time Systems Lecture - 4Saif AlabdullahNo ratings yet
- Tables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesFrom EverandTables of The Legendre Functions P—½+it(x): Mathematical Tables SeriesNo ratings yet
- MIT6 003F11 Lec04 PDFDocument50 pagesMIT6 003F11 Lec04 PDFMunir KadernaniNo ratings yet
- Storage Tanks-Cost InfoDocument4 pagesStorage Tanks-Cost InfoSwath M MuraliNo ratings yet
- Engineer Guide Tank Gauging PDFDocument104 pagesEngineer Guide Tank Gauging PDFnknicoNo ratings yet
- Apex SteelDocument64 pagesApex SteelSteve Jsob100% (1)
- Operating Manual Pilot-Controlled Pressure Regulators: Sheet No. RP/4.1.161.1.1 Issue 11.02.2016 © 2016 Mankenberg GMBHDocument16 pagesOperating Manual Pilot-Controlled Pressure Regulators: Sheet No. RP/4.1.161.1.1 Issue 11.02.2016 © 2016 Mankenberg GMBHMunir KadernaniNo ratings yet
- MIT6 003F11 Lec02Document58 pagesMIT6 003F11 Lec02Farrukh TahirNo ratings yet
- V001t02a007 Ipc2000 117Document10 pagesV001t02a007 Ipc2000 117zafarbadalNo ratings yet
- United States Patent (10) Patent No.: US 6,282,863 B1: Christian Et Al. (45) Date of Patent: Sep. 4, 2001Document20 pagesUnited States Patent (10) Patent No.: US 6,282,863 B1: Christian Et Al. (45) Date of Patent: Sep. 4, 2001Munir KadernaniNo ratings yet
- Mit6 003f11 Lec03Document48 pagesMit6 003f11 Lec03api-246008426No ratings yet
- Angles PDFDocument2 pagesAngles PDFMunir KadernaniNo ratings yet
- Signals and SystemsDocument37 pagesSignals and SystemsMadhu TellakuklaNo ratings yet
- AMETank Product BrochureDocument6 pagesAMETank Product BrochureSYedZYnAleNo ratings yet
- Applied Structural Analysis and Design MethodsDocument10 pagesApplied Structural Analysis and Design MethodspercepNo ratings yet
- API 650 bolt torque values manholesDocument2 pagesAPI 650 bolt torque values manholesMunir KadernaniNo ratings yet
- Pipe-To-Pipe: Lignment OF IPEDocument2 pagesPipe-To-Pipe: Lignment OF IPEMunir KadernaniNo ratings yet
- Fixed Overhead - Standard Cost and Variances - AccountingCoach - 5Document4 pagesFixed Overhead - Standard Cost and Variances - AccountingCoach - 5Munir KadernaniNo ratings yet
- Cable Products Price ListDocument24 pagesCable Products Price ListPeter BridgeNo ratings yet
- Sizing of Pressure Relief ValveDocument9 pagesSizing of Pressure Relief Valvekenoly123100% (3)
- ATX - DA1W1T104 - OmnicalDocument1 pageATX - DA1W1T104 - OmnicalMunir KadernaniNo ratings yet
- Efdcn 2017Document4 pagesEfdcn 2017Munir KadernaniNo ratings yet
- 55480Document41 pages55480Munir KadernaniNo ratings yet
- Cable Products Price ListDocument24 pagesCable Products Price ListPeter BridgeNo ratings yet
- Product Cs Pg34 PDFDocument1 pageProduct Cs Pg34 PDFMunir KadernaniNo ratings yet
- Honeywell Switch CatalogDocument213 pagesHoneywell Switch Cataloghammondelec100% (3)
- Victaulic General Catalog 2017Document156 pagesVictaulic General Catalog 2017kuraimundNo ratings yet
- Top PourerDocument4 pagesTop PourerMunir KadernaniNo ratings yet
- ATEX Electric Equipment Classification Labelling PDFDocument1 pageATEX Electric Equipment Classification Labelling PDFRamius HamdaniNo ratings yet
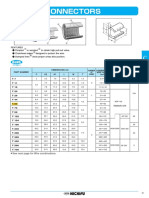
- C Clamp ConnectorDocument1 pageC Clamp ConnectorMunir KadernaniNo ratings yet
- Ansys Interfacing With VC&FortranDocument10 pagesAnsys Interfacing With VC&FortranBing HanNo ratings yet
- Long QuizDocument2 pagesLong QuizDavid Mikael Nava TaclinoNo ratings yet
- Alia AUF790 Ultrasonic Open Channel FlowmeterDocument4 pagesAlia AUF790 Ultrasonic Open Channel FlowmeterRexCrazyMindNo ratings yet
- Cloud AnekaDocument49 pagesCloud Anekashreyasvidyarthi100% (1)
- CHAPTER 2.-DikonversiDocument18 pagesCHAPTER 2.-DikonversiHardianti EkaputriNo ratings yet
- PeriodicityDocument6 pagesPeriodicityHadi AlnaherNo ratings yet
- Q Miii NotesDocument63 pagesQ Miii NotesJumar CadondonNo ratings yet
- Semi-Fowler TB BreathingDocument11 pagesSemi-Fowler TB BreathingLagee PukoNo ratings yet
- PracticeProblems 4315 SolutionsDocument9 pagesPracticeProblems 4315 SolutionsKashifRizwanNo ratings yet
- FTP Imp RCDocument48 pagesFTP Imp RCKarthik KeyanNo ratings yet
- Saptarshi PDFDocument15 pagesSaptarshi PDFViriato SouzaNo ratings yet
- Multiple Organ Failure Post Injury, Pathophysiology and Prevention of ARDS in Trauma PatientDocument37 pagesMultiple Organ Failure Post Injury, Pathophysiology and Prevention of ARDS in Trauma PatientDipo Mas SuyudiNo ratings yet
- Johan Sundberg. Intonation in Singing.Document15 pagesJohan Sundberg. Intonation in Singing.Юрий СемёновNo ratings yet
- Ai Lab13Document5 pagesAi Lab13Hamna AmirNo ratings yet
- Manual Imo Pump 3g SeriesDocument8 pagesManual Imo Pump 3g SeriesВладимир50% (2)
- Kingfisher Rtu Mod BusDocument4 pagesKingfisher Rtu Mod BusClifford RyanNo ratings yet
- Lord Immanuel Institute Foundation, Inc.: First Periodical Test in Mathematics 9Document5 pagesLord Immanuel Institute Foundation, Inc.: First Periodical Test in Mathematics 9Cee Jay AbanillaNo ratings yet
- 20a Solar Power Controller ManualDocument8 pages20a Solar Power Controller ManualVeilleur De ConscienceNo ratings yet
- 5 Optimising The Speed Potential of Curves - Increase in Permissible Cant Deficiency - FeasibilityDocument12 pages5 Optimising The Speed Potential of Curves - Increase in Permissible Cant Deficiency - FeasibilitydevidattairsmeNo ratings yet
- 07 Rr410208 Computer Aided Design of Electrical MachinesDocument4 pages07 Rr410208 Computer Aided Design of Electrical MachinesandhracollegesNo ratings yet
- Spract 4Document24 pagesSpract 4Jennifer SmithNo ratings yet
- MSTE Module 6Document2 pagesMSTE Module 6jovar jumao-asNo ratings yet
- Vagrant InstallationDocument32 pagesVagrant InstallationDian Hanifudin SubhiNo ratings yet
- Calculation Formula For The CapacitorDocument9 pagesCalculation Formula For The CapacitorMedyouNo ratings yet
- Introduction to C++ FundamentalsDocument23 pagesIntroduction to C++ FundamentalsRitika MidhaNo ratings yet
- OnTarget ARA Software InstructionsDocument7 pagesOnTarget ARA Software InstructionsMpmendoNo ratings yet
- OutlineDocument88 pagesOutlineLorrayne Zhen T. CarabidoNo ratings yet
- MTH302 - Business Mathematics & Statistics - Solved - MID Term Paper - 05Document5 pagesMTH302 - Business Mathematics & Statistics - Solved - MID Term Paper - 05ehtasham shakeelNo ratings yet
- Field and Laboratory Evaluation of A Soft Clay Southern IraqDocument14 pagesField and Laboratory Evaluation of A Soft Clay Southern Iraqvidyaranya_bNo ratings yet
- Energy Recovery From Landing AircraftDocument8 pagesEnergy Recovery From Landing AircraftRaniero FalzonNo ratings yet