You might also like
- Digital Navy - USS Oregon PDFDocument25 pagesDigital Navy - USS Oregon PDFbamboobuckNo ratings yet
- Lights, Buoys - Aids To Navigation - COLREGSDocument13 pagesLights, Buoys - Aids To Navigation - COLREGSFILGUEIRA JUNIOR80% (5)
- BosunDocument182 pagesBosunnavigator1977100% (1)
- Ship Construction Notes For Pre Sea Deck CadetsDocument30 pagesShip Construction Notes For Pre Sea Deck CadetsArvindNo ratings yet
- Bridge Resource Management for Small Ships (PB)From EverandBridge Resource Management for Small Ships (PB)Rating: 5 out of 5 stars5/5 (4)
- SQEMARINEPassage PlanningDocument3 pagesSQEMARINEPassage PlanningCapt. Lakhi Narayan Mandal IMU Navi Mumbai Campus100% (2)
- Plans and Procedures Recovery Persons From Water FINALDocument38 pagesPlans and Procedures Recovery Persons From Water FINALRihards67% (6)
- BP 3 The International Maritime Dangerous Goods Imdg CodeDocument20 pagesBP 3 The International Maritime Dangerous Goods Imdg CodepavithranrohanNo ratings yet
- Powerboating: The RIB & Sportsboat Handbook: Handling RIBs & SportsboatsFrom EverandPowerboating: The RIB & Sportsboat Handbook: Handling RIBs & SportsboatsNo ratings yet
- 2.ship ConstDocument74 pages2.ship ConstArjun AchuNo ratings yet
- Talky Talkies 171101Document48 pagesTalky Talkies 171101kalpesh100% (1)
- Notes To Master of Ship PDFDocument14 pagesNotes To Master of Ship PDFSiva Pasagadugula100% (1)
- Chart Work PPT - 5TH Revision - Aug2021 Batch OnwardsDocument63 pagesChart Work PPT - 5TH Revision - Aug2021 Batch OnwardsAjal Shajahan100% (2)
- Lights Navigation Lights: DefinitionsDocument5 pagesLights Navigation Lights: DefinitionsokaNo ratings yet
- Stability - Booklet Northern Juveline (Ice Bird)Document241 pagesStability - Booklet Northern Juveline (Ice Bird)Юра Ильченко100% (1)
- Ship Stability OOW Load LineDocument34 pagesShip Stability OOW Load LineAmin Al Qawasmeh100% (1)
- Unit 1 - Ships Magnetism Part 1Document13 pagesUnit 1 - Ships Magnetism Part 1The SinghNo ratings yet
- 1 (1) - Marine InstrumentsDocument51 pages1 (1) - Marine InstrumentsMin Minkyaw100% (2)
- 2MFG - MMD Ques Set Till July 2018 PDFDocument327 pages2MFG - MMD Ques Set Till July 2018 PDFindumarnicaraguaNo ratings yet
- Annex 13 - Magnetic CompassesDocument4 pagesAnnex 13 - Magnetic CompassesTraci MorganNo ratings yet
- Military Science 31: Naval OrientationDocument44 pagesMilitary Science 31: Naval OrientationJarvie JohnNo ratings yet
- 2 Reefer Cargo ManifestDocument3 pages2 Reefer Cargo Manifestjimmy_shroffNo ratings yet
- Deck TimberDocument79 pagesDeck TimberTom AlexNo ratings yet
- CO Code of Safe Practice For Carrying Deck Timber CargoesDocument61 pagesCO Code of Safe Practice For Carrying Deck Timber CargoesrigelNo ratings yet
- Bulk Carrier TrimmingDocument6 pagesBulk Carrier TrimmingojaswiNo ratings yet
- ARI Cargo Work NotesDocument145 pagesARI Cargo Work NotesAruneeka Bist100% (2)
- Timber Deck Cargoes: Regional Maritime UniversityDocument33 pagesTimber Deck Cargoes: Regional Maritime UniversityMahami M ProsperNo ratings yet
- Tanker Disasters: IMO's Places of Refuge and the Special Compensation Clause; Erika, Prestige, Castor and 65 CasualtiesFrom EverandTanker Disasters: IMO's Places of Refuge and the Special Compensation Clause; Erika, Prestige, Castor and 65 CasualtiesNo ratings yet
- NAPA Damage Stability According To SOLAS 2009 (2009)Document17 pagesNAPA Damage Stability According To SOLAS 2009 (2009)JOSEPH ANTONYNo ratings yet
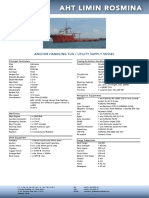
- Aht Limin Rosmina (4400 HP - 58 Tons BP - 280m2 Deck)Document3 pagesAht Limin Rosmina (4400 HP - 58 Tons BP - 280m2 Deck)Andzar Muhammad FauziNo ratings yet
- Topaz Tangaroa Tiamat Vessel SpecsDocument5 pagesTopaz Tangaroa Tiamat Vessel SpecsDhil SanNo ratings yet
- Chief Mate - Phase 1 - Cargo Handling and Stowage-18052011Document11 pagesChief Mate - Phase 1 - Cargo Handling and Stowage-18052011madhan01kumar0% (2)
- Chief Mates Phase 1 Paper FormatDocument8 pagesChief Mates Phase 1 Paper FormatLionell Furtado100% (1)
- Master Oral Notes NEW 2011 PDFDocument35 pagesMaster Oral Notes NEW 2011 PDFbehzad parsiNo ratings yet
- Safety ContourDocument16 pagesSafety ContourRazvan Radu100% (2)
- Ice Navigation & Seamanship: A Tanker Master's ExperienceDocument14 pagesIce Navigation & Seamanship: A Tanker Master's ExperienceKarn Jeet Singh100% (2)
- Cargo Handling & StowageDocument56 pagesCargo Handling & Stowagesamar jeetNo ratings yet
- Planing Is BunkumDocument12 pagesPlaning Is BunkumGermán AguirrezabalaNo ratings yet
- Radar Plotting NotesDocument13 pagesRadar Plotting NotesThapliyal SanjayNo ratings yet
- Ship Magnetism and the Magnetic Compass: The Commonwealth and International Library of Science, Technology, Engineering and Liberal Studies: Navigation and Nautical CoursesFrom EverandShip Magnetism and the Magnetic Compass: The Commonwealth and International Library of Science, Technology, Engineering and Liberal Studies: Navigation and Nautical CoursesRating: 5 out of 5 stars5/5 (3)
- Squat CalculationDocument2 pagesSquat CalculationAjay SinghNo ratings yet
- GRAINCALCNCBDocument8 pagesGRAINCALCNCBwaleedyehia100% (1)
- 004 Stability Loading Manual PDFDocument504 pages004 Stability Loading Manual PDFBogdan Stan100% (1)
- Week 6 - AppraisalDocument28 pagesWeek 6 - AppraisalVinz Vizen100% (2)
- Grain CalculationDocument11 pagesGrain CalculationWunna Tint Way100% (2)
- Chief Mate Stability 2005 2015 Past PapersDocument81 pagesChief Mate Stability 2005 2015 Past PapersVocacionado Npj50% (2)
- Submarine WarfareDocument14 pagesSubmarine WarfareAghil Buddy100% (1)
- Grain CalculationDocument33 pagesGrain Calculationpraveen100% (2)
- Carriage of Grain Safe Procedure - Bulk Carriers Recommended GuidelineDocument5 pagesCarriage of Grain Safe Procedure - Bulk Carriers Recommended GuidelineSunny Sehrawat100% (3)
- International Regulations For The Prevention of Collision at Sea (Irpcs)Document49 pagesInternational Regulations For The Prevention of Collision at Sea (Irpcs)behzad parsi100% (1)
- Guidelines For Damage Control Plans andDocument5 pagesGuidelines For Damage Control Plans andDimitris LurakosNo ratings yet
- Stability Problems 5Document31 pagesStability Problems 5Staicu-Anghel ElenaNo ratings yet
- Chain RegisterDocument2 pagesChain RegisterSachin chaudharyNo ratings yet
- Be in Command by Knowing These ECDIS Safety Settings: Written by On August 20, 2016Document20 pagesBe in Command by Knowing These ECDIS Safety Settings: Written by On August 20, 2016Panagiotis Mouzenidis100% (1)
- 5A-Solid Bulk CargoDocument18 pages5A-Solid Bulk CargoKhairudyIzwan100% (2)
- Yacht - Dubai - VerifiedDocument36 pagesYacht - Dubai - Verifiedjj jjNo ratings yet
- The World's Leading Portfolio of Official Paper ChartsDocument6 pagesThe World's Leading Portfolio of Official Paper ChartsHtet lynn100% (2)
- D-101 Master Standing OrdersDocument9 pagesD-101 Master Standing Orderszainav100% (1)
- Microsoft PowerPoint - Stability at Small Angles (Compatibility Mode)Document37 pagesMicrosoft PowerPoint - Stability at Small Angles (Compatibility Mode)Mugilrajan DevarajanNo ratings yet
- P020213 Stability BookDocument115 pagesP020213 Stability BookPETERNo ratings yet
- Lifebuoy Line Correctly DeployedDocument2 pagesLifebuoy Line Correctly DeployedTeoStanciu100% (1)
- Colreg-06 Safe SpeedDocument1 pageColreg-06 Safe SpeedAhmad RamdhanNo ratings yet
- 4 - ManevraDocument44 pages4 - ManevraIulian Sandru100% (1)
- Traverse TablesDocument9 pagesTraverse TablesNorris BaguioNo ratings yet
- Unit 7. Cargo Work CalculationsDocument8 pagesUnit 7. Cargo Work CalculationsDankNo ratings yet
- Basic Principles: Tonnes (T) ) )Document11 pagesBasic Principles: Tonnes (T) ) )BharatiyulamNo ratings yet
- Ship Stability NomenclatureDocument6 pagesShip Stability NomenclatureRoderick EstrellaNo ratings yet
- Seamanship - DefinitionDocument2 pagesSeamanship - DefinitionFrenzie Mae Vasquez Rivera0% (1)
- Bulk Carrier Damages To Transverse WT BulkheadsDocument12 pagesBulk Carrier Damages To Transverse WT Bulkheadsmeghna c binuNo ratings yet
- Deck Opt C15Document15 pagesDeck Opt C15rheaangelasinutoNo ratings yet
- 6 Vessel ParticularsDocument1 page6 Vessel Particularsahahahah rereNo ratings yet
- Devanney 2009 The Consequences of Providing and Refusing RefugeDocument12 pagesDevanney 2009 The Consequences of Providing and Refusing RefugeRalphNo ratings yet
- Brochure Ahts Bourbon Liberty 200Document2 pagesBrochure Ahts Bourbon Liberty 200anon_591424251No ratings yet
- 2020-2023 Audit and InspectionDocument2 pages2020-2023 Audit and Inspectionjai kumarNo ratings yet
- Order Natin 1-5-2-4-3Document1 pageOrder Natin 1-5-2-4-3jai samNo ratings yet
- 1 - 700 SoruDocument90 pages1 - 700 SoruRichard100% (1)
- Raspuns La Mesaje de Urgenta Pe MareDocument5 pagesRaspuns La Mesaje de Urgenta Pe MareAndrei AlexNo ratings yet
- Tribute To Private Guadalupe Garza by Amando GonzalezDocument11 pagesTribute To Private Guadalupe Garza by Amando GonzalezBenavidesConnectNo ratings yet
- Peak Down Peak D. South W.G Peak D. Peak D. Peak Down Goonyela Peak Down Peak DownDocument1 pagePeak Down Peak D. South W.G Peak D. Peak D. Peak Down Goonyela Peak Down Peak DownEvgeny NovikovNo ratings yet
- Ship Particular - Las 2Document1 pageShip Particular - Las 2Bayu Putra100% (1)
- Heavy Lift Ship: Vessel Semi-SubmersiblesDocument10 pagesHeavy Lift Ship: Vessel Semi-SubmersiblesZtik PeraltaNo ratings yet
- MOST Presentation: Container ShipsDocument9 pagesMOST Presentation: Container ShipssimonNo ratings yet
- A History of SteamboatsDocument6 pagesA History of Steamboatslink2u_007No ratings yet
- Diseño 9 BDocument3 pagesDiseño 9 BPaul Renato Montero GuevaraNo ratings yet
- Damen ASD Tug 2810 YN511582 ParamaconiDocument2 pagesDamen ASD Tug 2810 YN511582 ParamaconiedgkornNo ratings yet
- C11-3 FAST2011 CusanelliDocument9 pagesC11-3 FAST2011 CusanelliRamkrishna MahatoNo ratings yet
- Resume 3rd EngineerDocument1 pageResume 3rd EngineerRestu KrisnantoNo ratings yet