You might also like
- Arduino For BeginnersDocument100 pagesArduino For BeginnersMaria BuneaNo ratings yet
- Remote Programming Software (RPS) : D5500CU v6.09Document20 pagesRemote Programming Software (RPS) : D5500CU v6.09westwind347No ratings yet
- JCo TutorialDocument58 pagesJCo Tutorialandr7ejNo ratings yet
- LoftingDocument206 pagesLoftingeventnowNo ratings yet
- OM Riele Photometer 4040 - V5Document22 pagesOM Riele Photometer 4040 - V5Nghi NguyenNo ratings yet
- Exclusive Sap Basis Training Ebook PDFDocument362 pagesExclusive Sap Basis Training Ebook PDFsakthirobotic50% (2)
- SRS - How to build a Pen Test and Hacking PlatformFrom EverandSRS - How to build a Pen Test and Hacking PlatformRating: 2 out of 5 stars2/5 (1)
- Method Statement For Partial Discharge Measurement: Application NoteDocument13 pagesMethod Statement For Partial Discharge Measurement: Application Notejmrs7322No ratings yet
- Tempus Timing Signoff Solution Ds PDFDocument3 pagesTempus Timing Signoff Solution Ds PDFHitesh PradhanNo ratings yet
- Configuration Data Sheet Roclink 800 Configuration Software Rl800 en 132208Document5 pagesConfiguration Data Sheet Roclink 800 Configuration Software Rl800 en 132208Leonardo Holanda100% (1)
- Oracle Hospitality OPERA IFC8 - Installation GuideDocument25 pagesOracle Hospitality OPERA IFC8 - Installation GuideitsmeNo ratings yet
- Factorytalk Assetcentre System Design and Implementation: Lab BookDocument150 pagesFactorytalk Assetcentre System Design and Implementation: Lab BookIsaac MendibleNo ratings yet
- D301183X012 - FloBoss 103 Modbus Host Program User ManualDocument44 pagesD301183X012 - FloBoss 103 Modbus Host Program User ManualdikastaloneNo ratings yet
- A6274 - DS800 QuickStart (ROC800)Document60 pagesA6274 - DS800 QuickStart (ROC800)Luis Arturo Ramirez EstebanNo ratings yet
- Running An Application From Internal Flash Memory On The TMS320F28xxx DSPDocument38 pagesRunning An Application From Internal Flash Memory On The TMS320F28xxx DSPShelby PerezNo ratings yet
- DS800 Development Suite Software: Specification SheetDocument2 pagesDS800 Development Suite Software: Specification SheetdocrafiNo ratings yet
- Release Notes 250-441Document35 pagesRelease Notes 250-441dube2012No ratings yet
- MicroFIPAOS Overview and User Guide D2.3Document18 pagesMicroFIPAOS Overview and User Guide D2.3joaoNo ratings yet
- Oracle® Hospitality Payment Interface and Token Proxy ServiceDocument18 pagesOracle® Hospitality Payment Interface and Token Proxy ServiceNguyen Thai SonNo ratings yet
- ReadmeDocument18 pagesReadme19860103No ratings yet
- Rfm9x Gui User Guide v1.0 enDocument17 pagesRfm9x Gui User Guide v1.0 enBhupendra SutharNo ratings yet
- Fmod Ex Programmer APIDocument10 pagesFmod Ex Programmer APISaad Akhter AliNo ratings yet
- Oracle® Communications Performance Intelligence Center: Release Notes E56972 Revision 5Document40 pagesOracle® Communications Performance Intelligence Center: Release Notes E56972 Revision 5malli gaduNo ratings yet
- Manual +ISO5167+Flow+Calculation+Program+ (FB103)Document26 pagesManual +ISO5167+Flow+Calculation+Program+ (FB103)Luis Alberto Portugal MariacalNo ratings yet
- ILSA User Reference GuideDocument48 pagesILSA User Reference Guiderdmiguel_19836No ratings yet
- Document 1153444.1Document4 pagesDocument 1153444.1Ferocci FerozNo ratings yet
- Error MessagesDocument640 pagesError MessageslinuxprogNo ratings yet
- b14441 PDFDocument6 pagesb14441 PDFkrishnaNo ratings yet
- Foxboro Evo™ Process Automation System: Product SpecificationsDocument8 pagesFoxboro Evo™ Process Automation System: Product SpecificationsEliana PintoNo ratings yet
- Rm/Cobol: Syntax SummaryDocument172 pagesRm/Cobol: Syntax SummaryKomal ParaswaniNo ratings yet
- Sap Radio Frequence Framework PDF FreeDocument29 pagesSap Radio Frequence Framework PDF FreeAltamir Nunes JuniorNo ratings yet
- Ieslps03 4p.Document4 pagesIeslps03 4p.Jose MartinezNo ratings yet
- Welcome To AUTOSAR Builder 2023xDocument19 pagesWelcome To AUTOSAR Builder 2023xVeeresh AmbeNo ratings yet
- Spra958f FlashDocument38 pagesSpra958f FlashMokan KannaNo ratings yet
- Web Service J2EEDocument27 pagesWeb Service J2EEUday KumarNo ratings yet
- RMT DanfossDocument32 pagesRMT DanfossOscar CárdenasNo ratings yet
- Alcatel-Lucent Omnipcx Enterprise Communication Server: Iptouch Doorcam - Installation GuideDocument35 pagesAlcatel-Lucent Omnipcx Enterprise Communication Server: Iptouch Doorcam - Installation Guideissa galalNo ratings yet
- Oracle Revenue Management and Billing Reporting SDK GuideDocument101 pagesOracle Revenue Management and Billing Reporting SDK GuidesaheemmirNo ratings yet
- Oracle FLEXCUBE Universal Banking: Reports User Guide Release 12.0.3.0.0Document18 pagesOracle FLEXCUBE Universal Banking: Reports User Guide Release 12.0.3.0.0cuonglunNo ratings yet
- Manual Jve PackDocument40 pagesManual Jve PackMuh SidikNo ratings yet
- OFSAAI Installation Guide 8.0.1.2.0Document8 pagesOFSAAI Installation Guide 8.0.1.2.0Prasad BillahalliNo ratings yet
- DENSO Manual CastellanoDocument692 pagesDENSO Manual CastellanoJulianna LizcanoNo ratings yet
- Oracle Retail Security Manager: Release Notes Release 12.0.2Document6 pagesOracle Retail Security Manager: Release Notes Release 12.0.2jonathansiaoNo ratings yet
- 04 Tso Ispf Ch01Document31 pages04 Tso Ispf Ch01Sachin GabhaneNo ratings yet
- Manual Network Auto Installer English Ver 1.00Document10 pagesManual Network Auto Installer English Ver 1.00patricioNo ratings yet
- Manual Label Printer Windows Driver English V5.09Document35 pagesManual Label Printer Windows Driver English V5.09Stephan SalmenNo ratings yet
- Release Notes - FieldTools - V3.5.1 - (Jan-2021)Document10 pagesRelease Notes - FieldTools - V3.5.1 - (Jan-2021)erharishkrsNo ratings yet
- 11 W445ngsc415443Document10 pages11 W445ngsc415443logic sanilNo ratings yet
- Reu05b0131 Rxap Flash APIDocument17 pagesReu05b0131 Rxap Flash APIStuart ArcherNo ratings yet
- YOF3 Communication DriverDocument16 pagesYOF3 Communication DriverNayan TongaleNo ratings yet
- FlowTalk 3Document21 pagesFlowTalk 3Mogtaba OsmanNo ratings yet
- Phaser 8560 MFPDocument296 pagesPhaser 8560 MFPshuler_bNo ratings yet
- GC Application Module For FB107Document52 pagesGC Application Module For FB107Mohammad Asif ZakriyyaNo ratings yet
- Alcatel-Lucent Omnipcx Enterprise Communication Server: Ip Desktop Softphone (Mac Os) Version - 10.XDocument30 pagesAlcatel-Lucent Omnipcx Enterprise Communication Server: Ip Desktop Softphone (Mac Os) Version - 10.XMarcelo Ratto CampiNo ratings yet
- RN 10000 10-10-0002 PDFDocument17 pagesRN 10000 10-10-0002 PDFkristi tarelliNo ratings yet
- Motif-Rack Xs Editor Owner's ManualDocument53 pagesMotif-Rack Xs Editor Owner's ManualalyankaNo ratings yet
- VRD2009 Installation Guide enDocument15 pagesVRD2009 Installation Guide enWilliamRogerssSSNo ratings yet
- OCMP 311 Release Notes July2006Document24 pagesOCMP 311 Release Notes July2006Nguyen Thanh ToanNo ratings yet
- PolyWorksPlug-in (Ai) Faro Laser Line ProbeDocument16 pagesPolyWorksPlug-in (Ai) Faro Laser Line ProbetiborNo ratings yet
- Introduction To Symbian Os: AIR University AU, PAF Complex, E-9, IslamabadDocument64 pagesIntroduction To Symbian Os: AIR University AU, PAF Complex, E-9, IslamabadAli AhmadNo ratings yet
- Release Notes - Instrument Inspector 2 - 0 - 2 - 0Document8 pagesRelease Notes - Instrument Inspector 2 - 0 - 2 - 0Adrian ReyesNo ratings yet
- Mastering z/OS Management Facility: A Comprehensive Guide to Mainframe Innovation: MainframesFrom EverandMastering z/OS Management Facility: A Comprehensive Guide to Mainframe Innovation: MainframesNo ratings yet
- Toxicity Test ReportDocument1 pageToxicity Test ReportSaravanan UlaganathanNo ratings yet
- D301601X012 - Field Removal Replacement of ControlWave-series Boot Flash ICs PDFDocument4 pagesD301601X012 - Field Removal Replacement of ControlWave-series Boot Flash ICs PDFSaravanan UlaganathanNo ratings yet
- D301596X012 - FloBoss 107 Level Sensor Application Module User Manual PDFDocument32 pagesD301596X012 - FloBoss 107 Level Sensor Application Module User Manual PDFSaravanan UlaganathanNo ratings yet
- D301428X012 - BSI - Config Users Guide PDFDocument14 pagesD301428X012 - BSI - Config Users Guide PDFSaravanan UlaganathanNo ratings yet
- D301599X012 - Supplement - OpenBSI 5 - 9 Service Pack - 3 PDFDocument4 pagesD301599X012 - Supplement - OpenBSI 5 - 9 Service Pack - 3 PDFSaravanan UlaganathanNo ratings yet
- D301649X012 - ROC800-Series FOUNDATION Fieldbus HSE Field Conversion Guide PDFDocument6 pagesD301649X012 - ROC800-Series FOUNDATION Fieldbus HSE Field Conversion Guide PDFSaravanan UlaganathanNo ratings yet
- ESDS Manual ProcedimientoDocument12 pagesESDS Manual ProcedimientoJesus RodriguezNo ratings yet
- D301417X012 - ACCOL Translator Users Guide PDFDocument67 pagesD301417X012 - ACCOL Translator Users Guide PDFSaravanan UlaganathanNo ratings yet
- Mri Airis II MRPSC Cz67ac-S13Document370 pagesMri Airis II MRPSC Cz67ac-S13Kosmic AdminNo ratings yet
- Lab Report #2Document9 pagesLab Report #2Noura MDNo ratings yet
- Unit 1 Whiz Looks BackDocument3 pagesUnit 1 Whiz Looks BackkamranNo ratings yet
- Advanced Li+ Battery-Pack Protectors: General Description FeaturesDocument16 pagesAdvanced Li+ Battery-Pack Protectors: General Description FeaturesCristian BandilaNo ratings yet
- Release Note Opentouch r20 Release 20 Opentouch Cac Call Admission ControlDocument159 pagesRelease Note Opentouch r20 Release 20 Opentouch Cac Call Admission ControlSumit DuttNo ratings yet
- Variable Speed Electric Fire Pump ControllersDocument4 pagesVariable Speed Electric Fire Pump Controllersمحمد مجديNo ratings yet
- How To Use The Global Set/Reset (GSR) SignalDocument20 pagesHow To Use The Global Set/Reset (GSR) SignalLuisa FernandaNo ratings yet
- HP 250 G7 Notebook PC MSGDocument108 pagesHP 250 G7 Notebook PC MSGTóth LászlóNo ratings yet
- Design Exercise 4 Charge PumpDocument22 pagesDesign Exercise 4 Charge PumpTrần Tấn ĐạiNo ratings yet
- Introduction To Embedded SystemsDocument2 pagesIntroduction To Embedded Systemsvenkata satishNo ratings yet
- Esquema Final - 98-0022-01 E2c Solution Summary PARTTEAM Kiosk (20.01.23) - 4Document14 pagesEsquema Final - 98-0022-01 E2c Solution Summary PARTTEAM Kiosk (20.01.23) - 4Jorge NetoNo ratings yet
- IOT Circuit Breaker Project Using Esp8266 & Atmega 328Document8 pagesIOT Circuit Breaker Project Using Esp8266 & Atmega 328GODFREY MASHINGAIDZENo ratings yet
- Chapter 1 Computer MemoryDocument17 pagesChapter 1 Computer MemoryRTS ContentNo ratings yet
- Wafer Level Package and Technology (Amkor)Document17 pagesWafer Level Package and Technology (Amkor)David GiulianoNo ratings yet
- Understanding Processor Security Technologies and How To Apply ThemDocument40 pagesUnderstanding Processor Security Technologies and How To Apply ThemTuyen DinhNo ratings yet
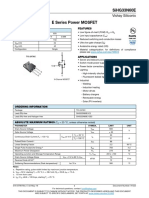
- Sihg33N60E: Vishay SiliconixDocument8 pagesSihg33N60E: Vishay SiliconixRK ComputacionNo ratings yet
- Dem128064o1fgh PWDocument17 pagesDem128064o1fgh PWRadu MititeluNo ratings yet
- Installation Manual Phontech 6200.pdf - Jotron PDFDocument106 pagesInstallation Manual Phontech 6200.pdf - Jotron PDFBogdan Ciobotaru0% (1)
- Raspberry Pi Workshop - Lab MaterialsDocument18 pagesRaspberry Pi Workshop - Lab Materialssalalma6634No ratings yet
- Vista 120 Cms Pi 9069858 enDocument6 pagesVista 120 Cms Pi 9069858 enmohamed elhelalyNo ratings yet
- Ofcom A Regulator S View On The Private Networks MarketDocument17 pagesOfcom A Regulator S View On The Private Networks MarketSoniaNo ratings yet
- Basinfall Platform: System Chipset: CpuDocument79 pagesBasinfall Platform: System Chipset: CpuDébo OrellanoNo ratings yet
- RS-WMB, RD-WMB: Room DisplayDocument8 pagesRS-WMB, RD-WMB: Room DisplayAnonymous XYAPaxjbYNo ratings yet
- Panasonic Pcz1203031ce Tx-P50gt50e tx-p50gt50j Chassis Gpf15d-E PDFDocument116 pagesPanasonic Pcz1203031ce Tx-P50gt50e tx-p50gt50j Chassis Gpf15d-E PDFnovyNo ratings yet
- Virtualization and Its Role in Cloud Computing EnvironmentDocument7 pagesVirtualization and Its Role in Cloud Computing EnvironmentNehal GuptaNo ratings yet
- Configuring Poe: Finding Feature InformationDocument18 pagesConfiguring Poe: Finding Feature InformationEsromdNo ratings yet
- L4 Basic-ElectronicsDocument16 pagesL4 Basic-Electronicstheo dominic silvosaNo ratings yet