You might also like
- 6 Steps in Booting Process of A ComputerDocument4 pages6 Steps in Booting Process of A ComputerONI OLUSEGUN ADEBAYO71% (7)
- 2903546) - Sergio Alejandro Genoy Cepeda (2903837)Document9 pages2903546) - Sergio Alejandro Genoy Cepeda (2903837)Sergio Alejandro Genoy CepedaNo ratings yet
- IoT Based Patient HealthDocument11 pagesIoT Based Patient HealthHusnain AfzalNo ratings yet
- AC Light Dimmer Arduino CodeDocument5 pagesAC Light Dimmer Arduino Codewidiharso3No ratings yet
- Arduino-Controlled Crockpot ThermostatDocument6 pagesArduino-Controlled Crockpot ThermostatJuanNo ratings yet
- DFC 77Document7 pagesDFC 77Ihsan LanaNo ratings yet
- IOT IntroductionDocument23 pagesIOT IntroductionMadhuNo ratings yet
- Iot Based Health Monitoring System CodeDocument3 pagesIot Based Health Monitoring System CodeMahesh KumarNo ratings yet
- Oxygen Enters The Lungs and Then Is Passed On Into Blood. The Blood CarriesDocument9 pagesOxygen Enters The Lungs and Then Is Passed On Into Blood. The Blood CarriesPranita PotghanNo ratings yet
- Arduino Arpeggiator CodeDocument38 pagesArduino Arpeggiator CodeAdrianoEngelNo ratings yet
- Tsl230r SensorDocument19 pagesTsl230r SensorRaquel Lòpez CamposNo ratings yet
- Arduino Code For Rev-LimiterDocument2 pagesArduino Code For Rev-Limiteryazzarco015No ratings yet
- Include C#Document3 pagesInclude C#genrielNo ratings yet
- Treasure Hunter CodeDocument3 pagesTreasure Hunter CodeMichael EngellennerNo ratings yet
- Const Int FrontEchoPinDocument6 pagesConst Int FrontEchoPinNeethi LalNo ratings yet
- Heartbeat Sensor CodeDocument3 pagesHeartbeat Sensor CodeTanvi tomarNo ratings yet
- Drone BlinkDocument4 pagesDrone BlinkptrNo ratings yet
- Code Snippet 2Document4 pagesCode Snippet 2itaemin243No ratings yet
- Programming A CounterDocument4 pagesProgramming A Counterapi-616212048No ratings yet
- SensorsDocument10 pagesSensors16-Najeeb AhmedNo ratings yet
- Analisa Program Detector TeganganDocument8 pagesAnalisa Program Detector Teganganblimbing rotor1No ratings yet
- Arduino PWM and FrecuenciaDocument5 pagesArduino PWM and FrecuenciaOscar Caceres ChuraNo ratings yet
- The Ultrasonic SensorDocument14 pagesThe Ultrasonic SensorAdalberto Sharpley100% (1)
- Human Detection - InoDocument4 pagesHuman Detection - InoAbdNo ratings yet
- Speedometer DisplayDocument2 pagesSpeedometer Displaysaksham hisariyaNo ratings yet
- CodigoDocument1 pageCodigoJuan carlos Mamani quispeNo ratings yet
- Proiecte ArduinoDocument46 pagesProiecte ArduinoSyad AlyNo ratings yet
- Contact Less ProjectDocument2 pagesContact Less ProjectSohail AfridiNo ratings yet
- This Code Should Work To Get Warning Cross The Buzzer When Something Be Closer Than 0Document4 pagesThis Code Should Work To Get Warning Cross The Buzzer When Something Be Closer Than 0jeonronbacurinNo ratings yet
- Const Int NumeralDocument5 pagesConst Int NumeralLmNo ratings yet
- ReloadircapturemoduleDocument3 pagesReloadircapturemoduleapi-398062839No ratings yet
- Arduino and Rasp-Pi InterfacingDocument8 pagesArduino and Rasp-Pi InterfacingAbhishek KotkarNo ratings yet
- Code DumpDocument17 pagesCode DumpGameplay OrIgInAlINo ratings yet
- Isd Code4Document5 pagesIsd Code4Khushi AgrawalNo ratings yet
- CodeDocument2 pagesCodeaboumariaNo ratings yet
- ThingSpeak Updated CodeDocument2 pagesThingSpeak Updated CodeSankara Subramanian KNo ratings yet
- Pidnn Arduino2Document2 pagesPidnn Arduino2Byron Xavier Lima CedilloNo ratings yet
- Learn Arduino With TinkerCad - Day 2 PDFDocument21 pagesLearn Arduino With TinkerCad - Day 2 PDFS.M. Fazla RabbiNo ratings yet
- Led RGB StripDocument25 pagesLed RGB StripKOKO CARDENASNo ratings yet
- Arduinos DianaDocument8 pagesArduinos DianaJulio DanielNo ratings yet
- MahhanDocument24 pagesMahhangiatrispktNo ratings yet
- Digital ExperimentsDocument14 pagesDigital Experimentsdeekshamb01052001No ratings yet
- Food Block RemoteDocument8 pagesFood Block Remoteapi-360229604No ratings yet
- LCD - Setcursor (D WPS OfficeDocument11 pagesLCD - Setcursor (D WPS OfficeapitsaefulanwarNo ratings yet
- Lampiran: Foto HardwareDocument22 pagesLampiran: Foto HardwareThomas Puri KrishanantoNo ratings yet
- PID+Line Follower CodeDocument8 pagesPID+Line Follower Codeanju120485No ratings yet
- Instructions ArduinoDocument2 pagesInstructions ArduinorudiNo ratings yet
- Verilog Code For Seven Segment DisplayDocument5 pagesVerilog Code For Seven Segment DisplayAlfred LiNo ratings yet
- Kode Program ArduinoDocument6 pagesKode Program ArduinoArisNo ratings yet
- Initgpio: Void VoidDocument12 pagesInitgpio: Void Voidapi-397509789No ratings yet
- Dem SupDocument5 pagesDem SupBurak AydınNo ratings yet
- Air Mouse CodeDocument19 pagesAir Mouse CodeBakhtiar TiarNo ratings yet
- Assignment 1 ReportDocument19 pagesAssignment 1 ReportJyiou YimushiNo ratings yet
- Vúmetro ArduinoDocument32 pagesVúmetro ArduinoGEOVANNY MORILLONo ratings yet
- Dry - Wet - Segregator CodeDocument2 pagesDry - Wet - Segregator Codesaeed shabibiNo ratings yet
- Control Proporcional Con Encoder OpticoDocument1 pageControl Proporcional Con Encoder OpticoMiguel Angel Saldaña MondragonNo ratings yet
- Balancebot CodeDocument8 pagesBalancebot CodeSam Fisher LambertNo ratings yet
- 1 Blink: Normal Timer ModeDocument4 pages1 Blink: Normal Timer ModeranaNo ratings yet
- ProjectsprogrammingarduinodrumsDocument5 pagesProjectsprogrammingarduinodrumschivas1111No ratings yet
- Code TextDocument2 pagesCode Textjitendra jhaNo ratings yet
- Slug: Printer's Direction: HeadlineDocument2 pagesSlug: Printer's Direction: HeadlineFarrenheit IsidroNo ratings yet
- Word Problem #4.2Document1 pageWord Problem #4.2Farrenheit IsidroNo ratings yet
- REFERENCESDocument2 pagesREFERENCESFarrenheit IsidroNo ratings yet
- The Journey of Odysseus MapDocument1 pageThe Journey of Odysseus MapFarrenheit IsidroNo ratings yet
- 03-Virtual Mitosis and Cancer LabDocument4 pages03-Virtual Mitosis and Cancer LabFarrenheit IsidroNo ratings yet
- TRADITIONAL AND CONTEMPORARY ART iIN REGION 1Document6 pagesTRADITIONAL AND CONTEMPORARY ART iIN REGION 1Farrenheit IsidroNo ratings yet
- Audio Amplifier Power Supplies: Page 1 of 3Document3 pagesAudio Amplifier Power Supplies: Page 1 of 3JangkrikNo ratings yet
- M2tex1000lt10ns 1Document59 pagesM2tex1000lt10ns 1Manuel AlvaradoNo ratings yet
- Electronics For Starters 1 - Diodes and LEDsDocument4 pagesElectronics For Starters 1 - Diodes and LEDsNuno MonteiroNo ratings yet
- Lab 09 - MESDocument8 pagesLab 09 - MESMuhammad Sarmad BaigNo ratings yet
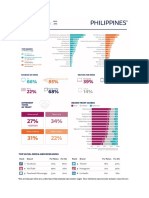
- DNR 2020 Philippines ChartsDocument1 pageDNR 2020 Philippines ChartsVERA FilesNo ratings yet
- Material List ENG54S01D8F - 20100210Document6 pagesMaterial List ENG54S01D8F - 20100210Tran Thanh LongNo ratings yet
- Bom of ESP CamDocument4 pagesBom of ESP CamOm VermaNo ratings yet
- Lab Record: Government College of Engineering Sengipatti, ThanjavurDocument94 pagesLab Record: Government College of Engineering Sengipatti, ThanjavurdineshNo ratings yet
- P-Channel Enhancement Mode Power Mosfet: Product SummaryDocument5 pagesP-Channel Enhancement Mode Power Mosfet: Product Summaryserrano.flia.coNo ratings yet
- CPLD & FpgaDocument41 pagesCPLD & FpgaBalaji MohantyNo ratings yet
- 480W DIN Rail Type DC-DC Converter: SeriesDocument9 pages480W DIN Rail Type DC-DC Converter: SeriesEhsan RohaniNo ratings yet
- Technical Information: A Guide For Upgrading Centum V and Centum-Xl To CENTUM VP (For Vnet/IP)Document80 pagesTechnical Information: A Guide For Upgrading Centum V and Centum-Xl To CENTUM VP (For Vnet/IP)PaulJohnPosadasGimenaNo ratings yet
- Microcontrollers and Systems Lesson7Document8 pagesMicrocontrollers and Systems Lesson7Jean de Dieu NGUIMFACK NDONGMONo ratings yet
- The Most Complete Starter Kit For MEGA V1.0.19.09.17 PDFDocument225 pagesThe Most Complete Starter Kit For MEGA V1.0.19.09.17 PDFJoseph Bro100% (1)
- ASK Multisim Simulation PDFDocument2 pagesASK Multisim Simulation PDFCristel BautistaNo ratings yet
- Iare Mtech Eslab ManualDocument72 pagesIare Mtech Eslab ManualAdarsh Rai NMAMIT - MechNo ratings yet
- Nabtesco Corporation: ProductDocument2 pagesNabtesco Corporation: ProductCarson ChiangNo ratings yet
- Digital VoltmeterDocument3 pagesDigital VoltmeterjayNo ratings yet
- APW7136A/B/C: Features General DescriptionDocument17 pagesAPW7136A/B/C: Features General DescriptionSergio VargasNo ratings yet
- Component Maintenance Manual: TDR-94/94D (-004 Status and Higher) ATC/Mode S Transponder (ICA)Document220 pagesComponent Maintenance Manual: TDR-94/94D (-004 Status and Higher) ATC/Mode S Transponder (ICA)estudogratisNo ratings yet
- Mosfets: Metal-Oxide-Semiconductor Field Effect TransistorsDocument29 pagesMosfets: Metal-Oxide-Semiconductor Field Effect TransistorslalitbickNo ratings yet
- Poweredge R940xa Spec SheetDocument2 pagesPoweredge R940xa Spec SheetBa VuVanNo ratings yet
- Datasheet gw39 PDFDocument10 pagesDatasheet gw39 PDFeme brosNo ratings yet
- Transponder 808613Document1 pageTransponder 808613Dammar Firdausi ANo ratings yet
- Vu+43+GloLED Specification+43inchDocument2 pagesVu+43+GloLED Specification+43incheldhoseab370No ratings yet
- SkyEdge II-c Capricorn-4Document2 pagesSkyEdge II-c Capricorn-4Gustavo AcostaNo ratings yet
- Worksheet Experiment CCV 1Document23 pagesWorksheet Experiment CCV 1abhi goyalNo ratings yet
- Automotive TFT-LCD Power Supply With Boost Converter and Gate Voltage RegulatorsDocument25 pagesAutomotive TFT-LCD Power Supply With Boost Converter and Gate Voltage RegulatorsHumberto AguilarNo ratings yet
- Max 3600Document30 pagesMax 3600VanBelkumWNo ratings yet