You might also like
- Measuring Thiele Small ParametersDocument6 pagesMeasuring Thiele Small ParametersIrfangiNo ratings yet
- SMC For Pitch Angle of A Variable Speed PMSG-wind Turbine Considering Actuator DynamicsDocument5 pagesSMC For Pitch Angle of A Variable Speed PMSG-wind Turbine Considering Actuator DynamicsDuyên Nguyễn NgọcNo ratings yet
- Moren - MODULE 3 - Beams-ColumnDocument18 pagesMoren - MODULE 3 - Beams-ColumnJoshua Espanto MorenNo ratings yet
- Wind TurbineDocument8 pagesWind Turbinesudeeraranjan100% (1)
- Cartesian Impedance Control of Redundant Robots: Recent Results With The DLR-Light-Weight-ArmsDocument6 pagesCartesian Impedance Control of Redundant Robots: Recent Results With The DLR-Light-Weight-ArmsByron Xavier Lima CedilloNo ratings yet
- 11 - Chapter 3Document38 pages11 - Chapter 3Kyaw Min ThetNo ratings yet
- Modelling and Investigations of Electrohydraulic Servo Valve With Piezo ElementDocument8 pagesModelling and Investigations of Electrohydraulic Servo Valve With Piezo Elementleena175No ratings yet
- TD1 SeismicDesign Silo 20222023 StatementDocument1 pageTD1 SeismicDesign Silo 20222023 StatementStm AlexxiaNo ratings yet
- 3 - 2b Transformer Energization - ModelingDocument7 pages3 - 2b Transformer Energization - ModelingNalex GeeNo ratings yet
- 2 - Introduction To Quiz - Wind Turbine Rotor Speed Control Strategy - New - Coursera PDFDocument5 pages2 - Introduction To Quiz - Wind Turbine Rotor Speed Control Strategy - New - Coursera PDFUsama MajeedNo ratings yet
- 2 Introduction To Quiz Wind Turbine Rotor Speed Control Strategy New CourseraDocument5 pages2 Introduction To Quiz Wind Turbine Rotor Speed Control Strategy New CourseraUsama Majeed33% (3)
- Mathematical StudiesDocument56 pagesMathematical StudiesOayes MiddaNo ratings yet
- Sinus Oi Dal ProfileDocument4 pagesSinus Oi Dal ProfiletygusNo ratings yet
- DC MotorDocument17 pagesDC MotorBijoy AyyagariNo ratings yet
- ControlDocument2 pagesControlAhmad AlmasriNo ratings yet
- Speed Control of Induction Motors: Synchronous Speed Ns 120 F/PDocument6 pagesSpeed Control of Induction Motors: Synchronous Speed Ns 120 F/Pmohamed shalabyNo ratings yet
- Pc-Ee 601Document36 pagesPc-Ee 601Koustav SahaNo ratings yet
- Module 3 Parallel Operation of AlternatorsDocument32 pagesModule 3 Parallel Operation of AlternatorsJoshua Roberto Gruta50% (2)
- MATLAB SIMULATIONS FOR GARNELL's ROLL AUTOPILOTDocument16 pagesMATLAB SIMULATIONS FOR GARNELL's ROLL AUTOPILOTD.ViswanathNo ratings yet
- Baseline Params Table 2018 68pcDocument343 pagesBaseline Params Table 2018 68pcAkino AskNo ratings yet
- Disturbance Accommodating LQR Method Based Pitch Control Strategy For Wind TurbinesDocument5 pagesDisturbance Accommodating LQR Method Based Pitch Control Strategy For Wind TurbinesStefania OliveiraNo ratings yet
- Energy Efficient Control of An Induction Machine Under Load Torque Step ChangeDocument11 pagesEnergy Efficient Control of An Induction Machine Under Load Torque Step ChangeOlimpiu StoicutaNo ratings yet
- 10 Accleration Vibration and Shock Measurement Rev 1 080525Document7 pages10 Accleration Vibration and Shock Measurement Rev 1 080525Emad Ali Abu HassnaienNo ratings yet
- 2010-07 - Saddelpoint000Document14 pages2010-07 - Saddelpoint000kaled1971No ratings yet
- Dynamic Analysis of Gear and Rack Transmission SysDocument6 pagesDynamic Analysis of Gear and Rack Transmission SysEverest Engineering Lead R&DNo ratings yet
- Rocket Propulsion Part IDocument9 pagesRocket Propulsion Part IMohamed KhairyNo ratings yet
- Cartesian Impedance Control of RedundantDocument6 pagesCartesian Impedance Control of Redundant이재봉No ratings yet
- ASME Journal of Mechanical DesignDocument20 pagesASME Journal of Mechanical Designmilda annaqiyahNo ratings yet
- Structure Optimization Approach For Minimum-Time Reconfiguration of Tensegrity Systems by Aldrich, SkeltonDocument12 pagesStructure Optimization Approach For Minimum-Time Reconfiguration of Tensegrity Systems by Aldrich, SkeltonTensegrity WikiNo ratings yet
- Amca05073 PDFDocument6 pagesAmca05073 PDFEmil EneNo ratings yet
- Wave Energy Converter ControlDocument97 pagesWave Energy Converter ControlKenneth TanNo ratings yet
- DownloadDocument2 pagesDownloadManoesh JohnNo ratings yet
- Using Tensors To Track Earthquakes On Hydraulic Shaker TablesDocument5 pagesUsing Tensors To Track Earthquakes On Hydraulic Shaker TablesJose Luis SarmientoNo ratings yet
- 01 Driver Seat Semi-Active Vibration Control PDFDocument6 pages01 Driver Seat Semi-Active Vibration Control PDFgurudev001No ratings yet
- Laboratory 3: The LCR Circuit: Forced, Damped Oscillations.: Phys130 Fall, 2003Document5 pagesLaboratory 3: The LCR Circuit: Forced, Damped Oscillations.: Phys130 Fall, 2003Virali DoshiNo ratings yet
- DNS of The Taylor-Green Vortex at Re 1600: Koen - Hillewaert@cenaero - Be Corentin - Carton@cenaero - BeDocument5 pagesDNS of The Taylor-Green Vortex at Re 1600: Koen - Hillewaert@cenaero - Be Corentin - Carton@cenaero - BerandNo ratings yet
- Solving An Inverse Problem For The Wave Equation by Using A Minimization Algorithm and Time-Reversed MeasurementsDocument22 pagesSolving An Inverse Problem For The Wave Equation by Using A Minimization Algorithm and Time-Reversed Measurementsdeiveegan1No ratings yet
- Automobile Suspension Design: Ian Arlen, Paul Gu Enette, & Ariel LevyDocument10 pagesAutomobile Suspension Design: Ian Arlen, Paul Gu Enette, & Ariel LevyHermesNo ratings yet
- Supercritical Airfoil and CharacteristicsDocument7 pagesSupercritical Airfoil and CharacteristicsABHISHEK MANI TRIPATHINo ratings yet
- Flow EqualizationDocument9 pagesFlow EqualizationhaymedeleonNo ratings yet
- Wind Energy Conversion Systems KD7011 Project ReportDocument13 pagesWind Energy Conversion Systems KD7011 Project ReportMah EshNo ratings yet
- Final Exam Solutions 2009-2010Document9 pagesFinal Exam Solutions 2009-2010engnavaljoaoNo ratings yet
- ME311 Autumn2020 EndSem FinalVersionDocument4 pagesME311 Autumn2020 EndSem FinalVersionVarun PathakNo ratings yet
- Facts Devices: 1. Thyristor-Controlled Phase Shifter (TCPS)Document8 pagesFacts Devices: 1. Thyristor-Controlled Phase Shifter (TCPS)khalidNo ratings yet
- AE 667 - Rotary Wing Aerodynamics Assignment 1: Ayush Sarraf 190010014Document14 pagesAE 667 - Rotary Wing Aerodynamics Assignment 1: Ayush Sarraf 190010014RAMAN VERMANo ratings yet
- CS Unit-3Document16 pagesCS Unit-3auchthram143No ratings yet
- Computer Simulation Model of A Lift Car Assembly With An Active Tuned Mass DamperDocument6 pagesComputer Simulation Model of A Lift Car Assembly With An Active Tuned Mass DamperfreddyjoertyNo ratings yet
- 6.9 Wave Forces On A Body: 2.20 - Marine Hydrodynamics, Fall 2008Document6 pages6.9 Wave Forces On A Body: 2.20 - Marine Hydrodynamics, Fall 2008ricky.pigazziniNo ratings yet
- Chapter 8 Well ModelsDocument19 pagesChapter 8 Well Modelstamurt80No ratings yet
- Iterative Minimization of Energy Part 2Document20 pagesIterative Minimization of Energy Part 2Sameh LotfyNo ratings yet
- Torsional Stresses in Shaft (Civil Engg. For AUST EEE 1/1)Document36 pagesTorsional Stresses in Shaft (Civil Engg. For AUST EEE 1/1)Fazlay ElahiNo ratings yet
- Whatis Frequency Response?Document32 pagesWhatis Frequency Response?Arshiya Kousar MNo ratings yet
- Exercise - Numerical Methods For Process Simulation: Algebraic Solvers Problem 1: CSTRDocument6 pagesExercise - Numerical Methods For Process Simulation: Algebraic Solvers Problem 1: CSTRMcChima LeonardNo ratings yet
- Transient Dynamic AnalysisDocument14 pagesTransient Dynamic Analysissunil481100% (1)
- Analysis of Tapered Beam Piezoelectric Energy HarvestersDocument4 pagesAnalysis of Tapered Beam Piezoelectric Energy HarvestersshikhamaharanaNo ratings yet
- Chapter 7: Transformer Design Optimization Using Evolutionary AlgorithmsDocument38 pagesChapter 7: Transformer Design Optimization Using Evolutionary AlgorithmsxiaomiNo ratings yet
- ProjectDocument24 pagesProjectJRNo ratings yet
- Dual Buffer System For PG-200/300/500 Governors: Product Manual 36054 (Revision NEW)Document14 pagesDual Buffer System For PG-200/300/500 Governors: Product Manual 36054 (Revision NEW)Samo SpontanostNo ratings yet
- PG Governor Speed Adjusting Motor: Product Manual 36014 (Revision F)Document8 pagesPG Governor Speed Adjusting Motor: Product Manual 36014 (Revision F)Samo SpontanostNo ratings yet
- Product Manual 36036 (Revision A) : Starting Fuel Limiter For PG GovernorsDocument10 pagesProduct Manual 36036 (Revision A) : Starting Fuel Limiter For PG GovernorsSamo SpontanostNo ratings yet
- Product Manual 36044 (Revision C) : Air/Fuel Ratio ControlDocument10 pagesProduct Manual 36044 (Revision C) : Air/Fuel Ratio ControlSamo SpontanostNo ratings yet
- Product Manual 36053 (Revision A) : PG Rail Governor Enhancement Kit 8956-581 and Similar KitsDocument10 pagesProduct Manual 36053 (Revision A) : PG Rail Governor Enhancement Kit 8956-581 and Similar KitsSamo SpontanostNo ratings yet
- OMAE2013-10135: Numerical Prediction of The Cooling of Burnt Cable For The Prevention of Re-IgnitionDocument6 pagesOMAE2013-10135: Numerical Prediction of The Cooling of Burnt Cable For The Prevention of Re-IgnitionSamo SpontanostNo ratings yet
- Omae2013 10144Document10 pagesOmae2013 10144Samo SpontanostNo ratings yet
- Product Leaflet AcsDocument4 pagesProduct Leaflet AcsSamo SpontanostNo ratings yet
- OMAE2013-10285: Time Domain Analysis Approach For Riser Vortex-Induced Vibration Based On Forced Vibration Test DataDocument8 pagesOMAE2013-10285: Time Domain Analysis Approach For Riser Vortex-Induced Vibration Based On Forced Vibration Test DataSamo SpontanostNo ratings yet
- OMAE2013-10306: Drilling Riser Viv Analysis Using Time Domain Code SimvivDocument12 pagesOMAE2013-10306: Drilling Riser Viv Analysis Using Time Domain Code SimvivSamo SpontanostNo ratings yet
- Alfa Laval Fuel Conditioning Module 1.5Document2 pagesAlfa Laval Fuel Conditioning Module 1.5Samo SpontanostNo ratings yet
- Alfa Laval Fuel Conditioning Module LPG: Fuel Conditioning System For MAN B&W ME-LGIP Dual-Fuel EnginesDocument2 pagesAlfa Laval Fuel Conditioning Module LPG: Fuel Conditioning System For MAN B&W ME-LGIP Dual-Fuel EnginesSamo SpontanostNo ratings yet
- OMAE2013-10160: Prediction of Water Wave Propagation Using Computational Fluid DynamicsDocument8 pagesOMAE2013-10160: Prediction of Water Wave Propagation Using Computational Fluid DynamicsSamo SpontanostNo ratings yet
- Alfa Laval Fuel Conditioning Module For Methanol (Meoh) : Low-Flashpoint Fuel Supply System For Me-Lgi EnginesDocument2 pagesAlfa Laval Fuel Conditioning Module For Methanol (Meoh) : Low-Flashpoint Fuel Supply System For Me-Lgi EnginesSamo SpontanostNo ratings yet
- Alfa Laval FCM One Gas: Fuel Conditioning System For ME-GI Dual-Fuel EnginesDocument2 pagesAlfa Laval FCM One Gas: Fuel Conditioning System For ME-GI Dual-Fuel EnginesSamo SpontanostNo ratings yet
- Alfa Laval TJ TZ 67 Rotary Jet Head - Portable - Product Leaflet - Ese00322 PDFDocument4 pagesAlfa Laval TJ TZ 67 Rotary Jet Head - Portable - Product Leaflet - Ese00322 PDFVils ArabadzhievaNo ratings yet
- TZ-82P Rotary Jet Head - Portable: Fast, Effective Impact CleaningDocument3 pagesTZ-82P Rotary Jet Head - Portable: Fast, Effective Impact CleaningSamo SpontanostNo ratings yet
- Toftejorg TZ-75 Rotary Jet Head - Portable: Fast, Effective Impact CleaningDocument3 pagesToftejorg TZ-75 Rotary Jet Head - Portable: Fast, Effective Impact CleaningSamo SpontanostNo ratings yet
- Alfa Laval TZ-750: Fast, Effective Impact CleaningDocument3 pagesAlfa Laval TZ-750: Fast, Effective Impact CleaningSamo SpontanostNo ratings yet
- Alfa Laval TZ-82F: Tank and Hold Cleaning MachineDocument2 pagesAlfa Laval TZ-82F: Tank and Hold Cleaning MachineSamo SpontanostNo ratings yet
- In Good Hands: Safeguarding Hygienic ApplicationsDocument34 pagesIn Good Hands: Safeguarding Hygienic ApplicationsSamo SpontanostNo ratings yet
- Alfa Laval TZ-89: Low Flow Impact CleaningDocument4 pagesAlfa Laval TZ-89: Low Flow Impact CleaningSamo SpontanostNo ratings yet
- Alfa Laval T-82P Rotary Jet Head - Portable: Fast, Effective Impact CleaningDocument4 pagesAlfa Laval T-82P Rotary Jet Head - Portable: Fast, Effective Impact CleaningSamo SpontanostNo ratings yet
- Alfa Laval TJ TZ 66 Rotary Jet Head - Portable - Product Leaflet - Ese00319 PDFDocument4 pagesAlfa Laval TJ TZ 66 Rotary Jet Head - Portable - Product Leaflet - Ese00319 PDFVils ArabadzhievaNo ratings yet
- Alfa Laval Gunclean Toftejorg I40 S: Single-Nozzle Tank Cleaning MachineDocument4 pagesAlfa Laval Gunclean Toftejorg I40 S: Single-Nozzle Tank Cleaning MachineSamo SpontanostNo ratings yet
- Alfa Laval T-82F: Tank and Hold Cleaning MachineDocument3 pagesAlfa Laval T-82F: Tank and Hold Cleaning MachineSamo SpontanostNo ratings yet
- Autochief® C20: Engine Control and Monitoring For General ElectricDocument2 pagesAutochief® C20: Engine Control and Monitoring For General ElectricВадим ГаранNo ratings yet
- Alfa Laval Gunclean Toftejorg I40 D: Dual-Nozzle Tank Cleaning MachineDocument4 pagesAlfa Laval Gunclean Toftejorg I40 D: Dual-Nozzle Tank Cleaning MachineSamo SpontanostNo ratings yet
- Gunclean Toftejorg T-73: Tank and Hold Cleaning MachineDocument2 pagesGunclean Toftejorg T-73: Tank and Hold Cleaning MachineSamo SpontanostNo ratings yet
- Bridge Wing Unit (Bwu) : Autochief® C20Document2 pagesBridge Wing Unit (Bwu) : Autochief® C20Samo SpontanostNo ratings yet
- Dwnload Full Introduction To Finite Elements in Engineering 4th Edition Chandrupatla Solutions Manual PDFDocument12 pagesDwnload Full Introduction To Finite Elements in Engineering 4th Edition Chandrupatla Solutions Manual PDFgilmadelaurentis100% (13)
- Fractions, Decimals, Percents: Learners Module in Business MathematicsDocument29 pagesFractions, Decimals, Percents: Learners Module in Business MathematicsJamaica C. AquinoNo ratings yet
- SCM - Session 8 (Forecasting)Document21 pagesSCM - Session 8 (Forecasting)Bushra Mubeen SiddiquiNo ratings yet
- Mark Scheme (Results) January 2019: Pearson Edexcel International GCSE Mathematics A (4MA0) Foundation Tier Paper 2FRDocument14 pagesMark Scheme (Results) January 2019: Pearson Edexcel International GCSE Mathematics A (4MA0) Foundation Tier Paper 2FRLIN YANNo ratings yet
- Lesson 2 - Variables and Data TypeDocument21 pagesLesson 2 - Variables and Data TypeJohn SonNo ratings yet
- Asservissement PDFDocument5 pagesAsservissement PDFMouad TalhaNo ratings yet
- CED 426 Quiz # 2 SolutionsDocument26 pagesCED 426 Quiz # 2 SolutionsMary Joanne AninonNo ratings yet
- The 13 Moon CalendarDocument24 pagesThe 13 Moon Calendarklatifdg100% (4)
- 2 - Recursive DefinitionDocument19 pages2 - Recursive DefinitionDaryl Ivan Hisola100% (5)
- AyazDocument17 pagesAyazAnsar NiazNo ratings yet
- Nonlinear Finite Elements - Lagrangian and Eulerian Descriptions - WikiversityDocument3 pagesNonlinear Finite Elements - Lagrangian and Eulerian Descriptions - Wikiversitypuganbu_155005532No ratings yet
- B.Tech. (5 Semester Mechanical) TRIBOLOGY (MEPE-17)Document5 pagesB.Tech. (5 Semester Mechanical) TRIBOLOGY (MEPE-17)varunNo ratings yet
- Chapter 2 Problem Analysis and DesignDocument35 pagesChapter 2 Problem Analysis and DesignWAN FAZLINI IDAYU BINTI WAN FAKARI - PKTNo ratings yet
- 7 - Course - in - Plastic - Limit - Analysis - Univ - Delft - Prof Vrouwenvelder-Beams-Frames PDFDocument121 pages7 - Course - in - Plastic - Limit - Analysis - Univ - Delft - Prof Vrouwenvelder-Beams-Frames PDFAnonymous Z1TsfwFx9mNo ratings yet
- AlgebraDocument2 pagesAlgebraNumber1tutorNo ratings yet
- C4 Vectors - Vector Lines PDFDocument33 pagesC4 Vectors - Vector Lines PDFMohsin NaveedNo ratings yet
- Advanced Composite Engineering Using MSC - Patran and FibersimDocument15 pagesAdvanced Composite Engineering Using MSC - Patran and FibersimSandeep BandyopadhyayNo ratings yet
- Steady State and Generalized State Space Averaging Analysis of TheDocument6 pagesSteady State and Generalized State Space Averaging Analysis of TheTedNo ratings yet
- PMP Exam Cram Test BankDocument260 pagesPMP Exam Cram Test Bankmuro562001100% (2)
- CASTEP StartupDocument38 pagesCASTEP StartupMuraleetharan BoopathiNo ratings yet
- Math Standards Grade 6Document8 pagesMath Standards Grade 6truadminNo ratings yet
- Thermo 5th Chap03P061Document22 pagesThermo 5th Chap03P061IENCSNo ratings yet
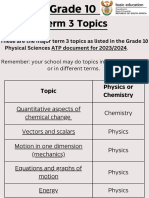
- Grade 10 Term 3 TopicsDocument10 pagesGrade 10 Term 3 TopicsOwamiirh RsaNo ratings yet
- Simplex Method Additional ActivityDocument3 pagesSimplex Method Additional ActivityIra Grace De CastroNo ratings yet
- XI AssignmentDocument5 pagesXI AssignmentPrashant DangiNo ratings yet
- Exam Style Answers 3 Asal Physics CBDocument2 pagesExam Style Answers 3 Asal Physics CBAnshul ShahNo ratings yet
- MCQ in Computer Fundamentals Part 1 ECE Board ExamDocument18 pagesMCQ in Computer Fundamentals Part 1 ECE Board ExamLuelson CordovaNo ratings yet
- Vibration Analysis LevelDocument230 pagesVibration Analysis LevelAhmed shawkyNo ratings yet
- A Comparison Test For Improper IntegralsDocument4 pagesA Comparison Test For Improper IntegralsGeorge SmithNo ratings yet
- RV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!From EverandRV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!No ratings yet
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- Shorting the Grid: The Hidden Fragility of Our Electric GridFrom EverandShorting the Grid: The Hidden Fragility of Our Electric GridRating: 4.5 out of 5 stars4.5/5 (2)
- The Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceFrom EverandThe Permaculture City: Regenerative Design for Urban, Suburban, and Town ResilienceNo ratings yet
- A Pathway to Decarbonise the Shipping Sector by 2050From EverandA Pathway to Decarbonise the Shipping Sector by 2050No ratings yet
- Carbon Capture, Utilization, and Storage Game Changers in Asia: 2020 Compendium of Technologies and EnablersFrom EverandCarbon Capture, Utilization, and Storage Game Changers in Asia: 2020 Compendium of Technologies and EnablersRating: 4.5 out of 5 stars4.5/5 (2)
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)
- Solar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsFrom EverandSolar Power Demystified: The Beginners Guide To Solar Power, Energy Independence And Lower BillsRating: 4.5 out of 5 stars4.5/5 (2)
- Renewable Energy: A Very Short IntroductionFrom EverandRenewable Energy: A Very Short IntroductionRating: 4.5 out of 5 stars4.5/5 (12)
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- ISO 50001: A strategic guide to establishing an energy management systemFrom EverandISO 50001: A strategic guide to establishing an energy management systemNo ratings yet
- Fundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsFrom EverandFundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsNo ratings yet
- Formulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsFrom EverandFormulas and Calculations for Drilling, Production, and Workover: All the Formulas You Need to Solve Drilling and Production ProblemsNo ratings yet
- Live Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerFrom EverandLive Off Grid: Escape The City, Learn How To Travel Intelligently Using Solar PowerNo ratings yet
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- Global Landscape of Renewable Energy FinanceFrom EverandGlobal Landscape of Renewable Energy FinanceNo ratings yet
- Practical Reservoir Engineering and CharacterizationFrom EverandPractical Reservoir Engineering and CharacterizationRating: 4.5 out of 5 stars4.5/5 (3)
- Electrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977From EverandElectrical Load-Curve Coverage: Proceedings of the Symposium on Load-Curve Coverage in Future Electric Power Generating Systems, Organized by the Committee on Electric Power, United Nations Economic Commission for Europe, Rome, Italy, 24 – 28 October 1977No ratings yet
- The Way Home: Tales from a life without technologyFrom EverandThe Way Home: Tales from a life without technologyRating: 4 out of 5 stars4/5 (45)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetFrom EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetRating: 2 out of 5 stars2/5 (1)
- Industrial Waste Treatment HandbookFrom EverandIndustrial Waste Treatment HandbookRating: 5 out of 5 stars5/5 (1)
- Grid-Scale Energy Storage Systems and ApplicationsFrom EverandGrid-Scale Energy Storage Systems and ApplicationsFu-Bao WuNo ratings yet
- Practical Methods for Analysis and Design of HV Installation Grounding SystemsFrom EverandPractical Methods for Analysis and Design of HV Installation Grounding SystemsRating: 4.5 out of 5 stars4.5/5 (2)