You might also like
- Solutions Manual For Satellite Communications Second Edition Timothy Pratt, Charles Bostian, Jeremy AllnuttDocument201 pagesSolutions Manual For Satellite Communications Second Edition Timothy Pratt, Charles Bostian, Jeremy AllnuttBaqar Rizvi95% (117)
- Solutions CH 03Document63 pagesSolutions CH 03AmirMohammad Rouhi100% (1)
- Solutions Manual For: Arm Assembly LanguageDocument129 pagesSolutions Manual For: Arm Assembly Languagemohammed IrheemNo ratings yet
- Modelado Rotary Pendulum Workbook InstructorDocument60 pagesModelado Rotary Pendulum Workbook Instructorsolid34No ratings yet
- Digital Control Engineering 2nd Edition Fadali Solution Manual - Doc254405506Document23 pagesDigital Control Engineering 2nd Edition Fadali Solution Manual - Doc254405506chyntia50% (4)
- Solution Manual For Discrete Time Signal Processing 3 E 3rd Edition Alan V Oppenheim Ronald W SchaferDocument4 pagesSolution Manual For Discrete Time Signal Processing 3 E 3rd Edition Alan V Oppenheim Ronald W SchaferHoward ZhangNo ratings yet
- StabilityDocument16 pagesStabilitythankamonyNo ratings yet
- Implementation of Bit-4 Calculator Using Fpga: Ms. Vemu Sulochana (Project Engineer)Document51 pagesImplementation of Bit-4 Calculator Using Fpga: Ms. Vemu Sulochana (Project Engineer)saurabhNo ratings yet
- 002 Tutorial SolutionDocument2 pages002 Tutorial SolutionArif Amir100% (1)
- Lab Report 5 Zaryab Rauf Fa17-Ece-046Document8 pagesLab Report 5 Zaryab Rauf Fa17-Ece-046HAMZA ALINo ratings yet
- QUBE-Servo 2 Swing-Up Control WorkbookDocument9 pagesQUBE-Servo 2 Swing-Up Control WorkbookShivamNo ratings yet
- Notas para Interfase Del Sensor DHT11 Al PICDocument66 pagesNotas para Interfase Del Sensor DHT11 Al PICJaime BarraganNo ratings yet
- Mcqs On MicrocontrollerDocument8 pagesMcqs On Microcontrollernitesh100% (1)
- Implementation of Uart On An FpgaDocument31 pagesImplementation of Uart On An FpgaNishanth KrishnappaNo ratings yet
- Solutions: Gs Sa SPSP App or PpaDocument25 pagesSolutions: Gs Sa SPSP App or PpaMichaelNo ratings yet
- Engineering - Finite Elements BeginningDocument10 pagesEngineering - Finite Elements BeginningMetin MehelNo ratings yet
- Chapter 8 Manual OgataDocument53 pagesChapter 8 Manual OgataKalim UllahNo ratings yet
- Bootstrap Sweep CircuitDocument3 pagesBootstrap Sweep CircuitAssini Hussain100% (1)
- Lecture 18 Static Error Constants and System TypeDocument21 pagesLecture 18 Static Error Constants and System TypeHamza KhanNo ratings yet
- ASM Design Example Bin MultDocument11 pagesASM Design Example Bin MultMudumby KulashekarNo ratings yet
- Transformada ZDocument17 pagesTransformada Znikika1No ratings yet
- Lab View Based Speed Control of DC Motor Using PID Controller-1582Document6 pagesLab View Based Speed Control of DC Motor Using PID Controller-1582user01254No ratings yet
- Bode PlotDocument7 pagesBode Plotnabilo20No ratings yet
- Design, Simulate and Implement A 5V DC Power Supply With Filter - Group No 14Document15 pagesDesign, Simulate and Implement A 5V DC Power Supply With Filter - Group No 14HARSHIL HARSHIL GUPTANo ratings yet
- FKBC DesignDocument21 pagesFKBC DesignStanley KubrickNo ratings yet
- PIC Instruction SetDocument64 pagesPIC Instruction SetHiru Purushothaman Hirudayanathan100% (2)
- Bluetooth Controlled Electronic Home AppliancesDocument29 pagesBluetooth Controlled Electronic Home AppliancesKaos Polos Nakira100% (5)
- GATE EE 2006 With SolutionsDocument56 pagesGATE EE 2006 With Solutionspwnkumar63100% (1)
- DSP Lab Report # 04Document23 pagesDSP Lab Report # 04Abdul BasitNo ratings yet
- Voltage Regulator (FINAL)Document33 pagesVoltage Regulator (FINAL)usama khattakNo ratings yet
- Control Systems: GATE Objective & Numerical Type SolutionsDocument32 pagesControl Systems: GATE Objective & Numerical Type SolutionsVinay Nagnath Jokare100% (1)
- Alu PDFDocument4 pagesAlu PDFAravindhan SaravananNo ratings yet
- Ch 07-ChuẩnDocument29 pagesCh 07-ChuẩnTam PhamNo ratings yet
- Reduction of Multiple SubsystemsDocument28 pagesReduction of Multiple SubsystemsDian Riana MustafaNo ratings yet
- Electrical and Electronics Lab Manual For Mechanical EngineeringDocument21 pagesElectrical and Electronics Lab Manual For Mechanical EngineeringSreerag Kunnathu SugathanNo ratings yet
- QUBE-Servo DC Motor ModelingDocument5 pagesQUBE-Servo DC Motor Modelingandres guerreroNo ratings yet
- Signal Generator Project StatementDocument16 pagesSignal Generator Project StatementHussain Bin AliNo ratings yet
- Pe Tutorial 2 PDFDocument10 pagesPe Tutorial 2 PDFkibrom atsbhaNo ratings yet
- Section PL7-1 LanguageDocument27 pagesSection PL7-1 LanguageTalyson AlexandreNo ratings yet
- VLSI Lab Manual Exercise ProblemsDocument38 pagesVLSI Lab Manual Exercise ProblemsPrakhar Kumar100% (1)
- A Simple Clock Using DS1307 + PIC16F877A - PIC Microcontroller NoteDocument14 pagesA Simple Clock Using DS1307 + PIC16F877A - PIC Microcontroller Notelkemmerich100% (2)
- Matlab and Simulink For Modeling and Control DC MotorDocument14 pagesMatlab and Simulink For Modeling and Control DC MotorGhaleb AlzubairiNo ratings yet
- CHP 4Document25 pagesCHP 4RizalFahmiNo ratings yet
- Verilog Implementation of Single Cycle MicroprocessorDocument13 pagesVerilog Implementation of Single Cycle MicroprocessorAbhinav JhaNo ratings yet
- Keyboard InterfacingDocument24 pagesKeyboard InterfacingBhautik DaxiniNo ratings yet
- UJT Triggering CircuitDocument6 pagesUJT Triggering Circuittmukesh62100% (1)
- Control PDFDocument26 pagesControl PDFFlat MateNo ratings yet
- Verilog HDL - 18ec56 AssignmentDocument2 pagesVerilog HDL - 18ec56 Assignmentsureshfm1No ratings yet
- SCR Half Wave Rectifier: Sample ProblemDocument2 pagesSCR Half Wave Rectifier: Sample Problemtinonoy KulitlitNo ratings yet
- Matlab Code For Implementation of Routh Harwitz TableDocument4 pagesMatlab Code For Implementation of Routh Harwitz Tablewaqasahmadz100% (1)
- Lab Manual 1-8Document31 pagesLab Manual 1-8Vengat Raman Manohar100% (1)
- 15ecl48 VTU Raghudathesh R 2r DacDocument5 pages15ecl48 VTU Raghudathesh R 2r Dacraghudatheshgp100% (1)
- Introduction To Robotics - MidtermDocument9 pagesIntroduction To Robotics - Midtermumar khanNo ratings yet
- Ee 328 Final 2017 SolDocument4 pagesEe 328 Final 2017 SolFawzi Radwan100% (1)
- Chap13 Exercise SolutionDocument9 pagesChap13 Exercise SolutionAnonymous pcanQ3No ratings yet
- Amplitude Modulation Modulation Full ChapterDocument96 pagesAmplitude Modulation Modulation Full ChapterMohamed shabanaNo ratings yet
- Analog Line FollowerDocument8 pagesAnalog Line FollowerRichard ArturoNo ratings yet
- Assignment Correction: Sinusoidal EM 22.3MB1 3.1Document6 pagesAssignment Correction: Sinusoidal EM 22.3MB1 3.1Ali Ahmad100% (1)
- Design A 4-Bit Johnson's Counter Using D Flip-FlopsDocument6 pagesDesign A 4-Bit Johnson's Counter Using D Flip-Flopslokesh krapaNo ratings yet
- System StabilityDocument24 pagesSystem StabilityGourav BhardwajNo ratings yet
- EE451 Ch4 F13 PDFDocument11 pagesEE451 Ch4 F13 PDFAhmad AbunassarNo ratings yet
- Solution Problem 5Document5 pagesSolution Problem 5DeVillersSeciNo ratings yet
- Mid 16 SolutionDocument5 pagesMid 16 Solutionaelghazawy88No ratings yet
- Homework Assignment: e y X F Xy ElseDocument1 pageHomework Assignment: e y X F Xy ElseMichaelNo ratings yet
- Chapter 3 SolutionsDocument18 pagesChapter 3 SolutionsMichaelNo ratings yet
- Chapter 2 Solutions: C Q H T D H DDocument22 pagesChapter 2 Solutions: C Q H T D H DMichaelNo ratings yet
- Chapter 1 Solutions: Block Diagram of Water Level Digital Control SystemDocument4 pagesChapter 1 Solutions: Block Diagram of Water Level Digital Control SystemMichaelNo ratings yet
- EE 370: Control Systems: University of Nevada RenoDocument2 pagesEE 370: Control Systems: University of Nevada RenoMichaelNo ratings yet
- EE REV REPORT - LagatuzDocument30 pagesEE REV REPORT - LagatuzPatrick HapitaNo ratings yet
- Finite Element MethodDocument32 pagesFinite Element MethodParvind Lolldharry100% (1)
- Laplace Transform: e F (T) DTDocument11 pagesLaplace Transform: e F (T) DTSyafiq FauziNo ratings yet
- Introduction To Econometrics - Stock & Watson - CH 5 SlidesDocument71 pagesIntroduction To Econometrics - Stock & Watson - CH 5 SlidesAntonio Alvino100% (2)
- Paper Chromatography QuestionsDocument4 pagesPaper Chromatography QuestionsMuhammadJahangirAlam100% (2)
- 8graphing - Quadratics 1Document16 pages8graphing - Quadratics 1bernadeth villanuevaNo ratings yet
- Full Download Solution Manual For Calculus 4th Edition Jon Rogawski Colin Adams Robert Franzosa PDF Full ChapterDocument36 pagesFull Download Solution Manual For Calculus 4th Edition Jon Rogawski Colin Adams Robert Franzosa PDF Full Chaptersquamulecytulab9z7100% (20)
- Mini Fact DoughnutDocument230 pagesMini Fact DoughnutGocozzy CommerceNo ratings yet
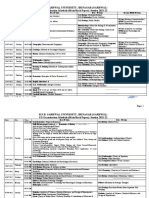
- Examination Date Sheet (B.A.,B.Sc - .,B.Com - ., B.P.Ed - Fourth and Sixth Semester Examination 2021-2022) - 0Document4 pagesExamination Date Sheet (B.A.,B.Sc - .,B.Com - ., B.P.Ed - Fourth and Sixth Semester Examination 2021-2022) - 0Mohit BangwalNo ratings yet
- Section 2.5: The Indeterminate Forms 0 0 AND: Learning ObjectivesDocument8 pagesSection 2.5: The Indeterminate Forms 0 0 AND: Learning ObjectivesNjoka Samuel KNo ratings yet
- Constraint QualificationDocument7 pagesConstraint QualificationWhattlial53No ratings yet
- Résultat Orientation EtudiantsDocument2 pagesRésultat Orientation EtudiantsAnis TissaouiNo ratings yet
- Pesticides MRL Guidelines Wrkdoc 2017-11813Document46 pagesPesticides MRL Guidelines Wrkdoc 2017-11813Anonymous SiO8gwwRtoNo ratings yet
- L01 FunctionsDocument12 pagesL01 Functionswe_spidus_2006No ratings yet
- MA6251 Mathematics II Notes Regulation 2013 2nd Semester Notes Maths 2 Notes M2 Notes Lecture Notes Subject Notes - 10th 12th Time Table 2018 - Regulation 2017 Syllabus Notes Collections - 3Document5 pagesMA6251 Mathematics II Notes Regulation 2013 2nd Semester Notes Maths 2 Notes M2 Notes Lecture Notes Subject Notes - 10th 12th Time Table 2018 - Regulation 2017 Syllabus Notes Collections - 3XaviFernando0% (1)
- ECEN 314: Signals and SystemsDocument7 pagesECEN 314: Signals and SystemsAbdul AhadNo ratings yet
- GARCH - Tutorial and Excel SpreadsheetDocument4 pagesGARCH - Tutorial and Excel SpreadsheetAjinkya AgrawalNo ratings yet
- Che 211 Course OutlineDocument7 pagesChe 211 Course OutlinemoatlhodiNo ratings yet
- 2019 Fourier SeriesDocument24 pages2019 Fourier SeriesAhmed RahatNo ratings yet
- Revised Scoring Matrix Julia JornalesDocument24 pagesRevised Scoring Matrix Julia JornalesRoland CamposNo ratings yet
- Open vs. Bracketing MethodsDocument10 pagesOpen vs. Bracketing MethodsHari Purnomo AdiNo ratings yet
- Lab 9 15F8418Document13 pagesLab 9 15F8418Talha AhsanNo ratings yet
- Literature ReviewDocument6 pagesLiterature ReviewSiddhi SharmaNo ratings yet
- Gas Chromatography-Mass Spectrometry: GlossaryDocument7 pagesGas Chromatography-Mass Spectrometry: GlossaryЮля ДрагунNo ratings yet
- Nearly Pentadiagonal Linear Systems: A. A. Karawia and S. A. El-ShehawyDocument14 pagesNearly Pentadiagonal Linear Systems: A. A. Karawia and S. A. El-ShehawyLuciano GonçalvesNo ratings yet
- Kullback Leibler Divergence Monotonicity of The Metropolis Hastings Markov ChainsDocument6 pagesKullback Leibler Divergence Monotonicity of The Metropolis Hastings Markov ChainsLucas BerlinotNo ratings yet
- InterCultural Comm. 5Document384 pagesInterCultural Comm. 5Vishal VinitNo ratings yet
- Gen. Math TestDocument5 pagesGen. Math TestAlfred LabadorNo ratings yet
- József Wildt International Mathematical Competition: The Edition XXIX, 2019Document12 pagesJózsef Wildt International Mathematical Competition: The Edition XXIX, 2019Anish RayNo ratings yet