You might also like
- Innovation Landscape brief: Electric-vehicle smart chargingFrom EverandInnovation Landscape brief: Electric-vehicle smart chargingNo ratings yet
- Energy Management For A Hybrid Solar Vehicle With Series StructureDocument6 pagesEnergy Management For A Hybrid Solar Vehicle With Series StructureRendy Adhi RachmantoNo ratings yet
- Hybrid Solar Vehicles: Maximizing Solar Energy for TransportationDocument19 pagesHybrid Solar Vehicles: Maximizing Solar Energy for TransportationKrishna MalhotraNo ratings yet
- Adaptive Multiresolution Energy Consumption Prediction For Electric VehiclesDocument11 pagesAdaptive Multiresolution Energy Consumption Prediction For Electric VehiclesMuhammed AlhanoutiNo ratings yet
- Some Issues On The Design of A Solar Vehicle Based On Hybrid Energy SystemDocument7 pagesSome Issues On The Design of A Solar Vehicle Based On Hybrid Energy SystemamitNo ratings yet
- Methodology for Sizing Air Vehicles with Hybrid Electric PropulsionDocument14 pagesMethodology for Sizing Air Vehicles with Hybrid Electric PropulsionSam100% (1)
- Development of An Indigenous Solar Powered CarDocument7 pagesDevelopment of An Indigenous Solar Powered CarAbba SimonNo ratings yet
- Non Isolated TopologiesDocument37 pagesNon Isolated TopologiesSATHISHKUMAR SNo ratings yet
- Propulsão ElétricaDocument14 pagesPropulsão ElétricaSergioNo ratings yet
- Hu 2014Document13 pagesHu 2014Marco SawNo ratings yet
- Model Based Development of Future Small Electric VehicleDocument8 pagesModel Based Development of Future Small Electric VehicleshubhamformeNo ratings yet
- Modeling, Simulation, and Analysis of Hybrid Electric Vehicle Using MATLAB Simulink2Document5 pagesModeling, Simulation, and Analysis of Hybrid Electric Vehicle Using MATLAB Simulink2SureshNo ratings yet
- Journal of Power Sources: Emiliano Pipitone, Gianpaolo VitaleDocument10 pagesJournal of Power Sources: Emiliano Pipitone, Gianpaolo VitaleBT20MEC120 Jyoti ThakurNo ratings yet
- 1 s2.0 S0360544217315438 MainDocument16 pages1 s2.0 S0360544217315438 MainUMP 1No ratings yet
- Nonlinear Model Predictive Extended Eco-Cruise Control For Battery Electric VehiclesDocument6 pagesNonlinear Model Predictive Extended Eco-Cruise Control For Battery Electric VehiclesasadjadiNo ratings yet
- Solar and Battery Input Super-Boost DC-DC Converter For Solar Powered Electric VehicleDocument8 pagesSolar and Battery Input Super-Boost DC-DC Converter For Solar Powered Electric VehicleNandhakumar NANDYNo ratings yet
- SolF charging system for electric vehiclesDocument4 pagesSolF charging system for electric vehiclesOm PuriNo ratings yet
- 1 s2.0 S0306261915009575 MainDocument9 pages1 s2.0 S0306261915009575 MainAmer AlmansoryNo ratings yet
- Vibration Energy Harvesting in Automotive Suspension System: A Detailed ReviewDocument75 pagesVibration Energy Harvesting in Automotive Suspension System: A Detailed ReviewsahayaNo ratings yet
- Energy: Wenlong Tian, Zhaoyong Mao, Xinyu An, Baoshou Zhang, Haibing WenDocument14 pagesEnergy: Wenlong Tian, Zhaoyong Mao, Xinyu An, Baoshou Zhang, Haibing WenDinku Seyoum ZelekeNo ratings yet
- Energy Management Strategy For Plug-In H PDFDocument9 pagesEnergy Management Strategy For Plug-In H PDFruxandaNo ratings yet
- 1 s2.0 S0360544223015128 MainDocument36 pages1 s2.0 S0360544223015128 MainWEIWEI YANGNo ratings yet
- Research ArticleDocument13 pagesResearch ArticleozieNo ratings yet
- DC To DC For Solar Powered Electric Vehicle PlagiarismDocument10 pagesDC To DC For Solar Powered Electric Vehicle PlagiarismNandhakumar NANDYNo ratings yet
- EV TerrainPreviewDocument11 pagesEV TerrainPreviewswapnil0211No ratings yet
- Solar Potential Assessment of Public Bus Routes For Solar BusesDocument8 pagesSolar Potential Assessment of Public Bus Routes For Solar BusesRoanaNo ratings yet
- Applied Energy: Chiara Fiori, Kyoungho Ahn, Hesham A. RakhaDocument12 pagesApplied Energy: Chiara Fiori, Kyoungho Ahn, Hesham A. RakhaJosé GonzálezNo ratings yet
- Energies 15 07243 v3Document26 pagesEnergies 15 07243 v3Tran DanteNo ratings yet
- Efficiency Evaluation of E-Commerce WebsitesDocument8 pagesEfficiency Evaluation of E-Commerce WebsitesAvisheik Barua 1721158No ratings yet
- Optimum Design of A Hybrid Renewable Energy SystemDocument21 pagesOptimum Design of A Hybrid Renewable Energy SystemsahiiiiNo ratings yet
- Mishra 2021Document8 pagesMishra 2021marianoasteNo ratings yet
- Zhang 2017Document8 pagesZhang 2017Qidiw Qidiw QidiwNo ratings yet
- 2020 Ditrolio ''A Hybrid Power-Unit Based On A Passive Fuel Cellbattery System For Light Weight Vehicles''Document11 pages2020 Ditrolio ''A Hybrid Power-Unit Based On A Passive Fuel Cellbattery System For Light Weight Vehicles''Abdul RehmanNo ratings yet
- Energy: Hassan FathabadiDocument9 pagesEnergy: Hassan FathabadiDinku Seyoum ZelekeNo ratings yet
- Thesis On Solar Wind Hybrid SystemDocument4 pagesThesis On Solar Wind Hybrid Systemchristimillerarlington100% (1)
- Solar - Electric Hybrid Ecofriendly QuikeDocument6 pagesSolar - Electric Hybrid Ecofriendly QuikeP Devi prasadNo ratings yet
- Propulsion System Optimization For A Turboelectric Tiltwing Urban Air Mobility AircraftDocument25 pagesPropulsion System Optimization For A Turboelectric Tiltwing Urban Air Mobility AircraftS KimNo ratings yet
- Benders-and-Price Approach For Electric Vehicle Charging Station Location Problem Under Probabilistic Travel RangeDocument35 pagesBenders-and-Price Approach For Electric Vehicle Charging Station Location Problem Under Probabilistic Travel RangeDîñ Êsh Chä ÛhâñNo ratings yet
- Design and Static Analysis of Regenerative Shock Absorber PDFDocument6 pagesDesign and Static Analysis of Regenerative Shock Absorber PDFKarthek SpNo ratings yet
- The Impact of Charging Battery Electric Vehicles On The Load Profile in The Presence of Renewable EnergyDocument4 pagesThe Impact of Charging Battery Electric Vehicles On The Load Profile in The Presence of Renewable EnergyAli HussienNo ratings yet
- Performance Investigation of A Series-Parallel Petrol-Electric VehicleDocument5 pagesPerformance Investigation of A Series-Parallel Petrol-Electric VehicleSathish KumarNo ratings yet
- Optimal Electric Vehicle Charging Station Placing With Integration of Renewable EnergyDocument5 pagesOptimal Electric Vehicle Charging Station Placing With Integration of Renewable EnergyNiyarjyoti dasNo ratings yet
- Development of Hybrid Vehicle Energy Consumption Model - I 2020Document20 pagesDevelopment of Hybrid Vehicle Energy Consumption Model - I 2020ruben rosete hernandezNo ratings yet
- Solar Electric Vehicle Energy Optimization For The Sasol Solar Challenge 2018Document16 pagesSolar Electric Vehicle Energy Optimization For The Sasol Solar Challenge 2018Avinash JosephNo ratings yet
- Un Enfoque Teórico Del Juego de Campo Medio para La Carga de Vehículos EléctricosDocument10 pagesUn Enfoque Teórico Del Juego de Campo Medio para La Carga de Vehículos EléctricosJULIETTE XIMENA SANCHEZ HUERTASNo ratings yet
- fathabadi2019Document8 pagesfathabadi2019venktesh22No ratings yet
- e3sconf_icregcsd2023_01006 (1)Document12 pagese3sconf_icregcsd2023_01006 (1)kanchanmshinde2000No ratings yet
- Urban Scale Photovoltaic Charging Stations For Electric VehiclesDocument8 pagesUrban Scale Photovoltaic Charging Stations For Electric Vehiclesfaizal IderisNo ratings yet
- Regenerative Braking Modeling, Control, and Simulation of A Hybrid Energy Storage System For An Electric Vehicle in Extreme ConditionsDocument15 pagesRegenerative Braking Modeling, Control, and Simulation of A Hybrid Energy Storage System For An Electric Vehicle in Extreme ConditionsBouchendouka LiliaNo ratings yet
- Overview and Prospects On Distributed Drive Electric VehiclesDocument4 pagesOverview and Prospects On Distributed Drive Electric Vehiclesbobowiki123No ratings yet
- Optimal Torque Split Strategy of Dual-Motor ElectrDocument21 pagesOptimal Torque Split Strategy of Dual-Motor Electrquang caoNo ratings yet
- Fuel Cell Cars in A Microgrid For Synergies Between Hydrogen - 2017 - Applied EDocument9 pagesFuel Cell Cars in A Microgrid For Synergies Between Hydrogen - 2017 - Applied Ehridoy bosuniaNo ratings yet
- Mayet2014-Influence of An Energy Storage System On The EnergyDocument9 pagesMayet2014-Influence of An Energy Storage System On The EnergyDaniel ChamposkiNo ratings yet
- A Novel Energy Management Strategy For Hybrid Electric Vehicles IEEEDocument12 pagesA Novel Energy Management Strategy For Hybrid Electric Vehicles IEEEDamir JelaskaNo ratings yet
- Comparison of Four-Wheel-Drive Hybrid Powertrain ConfigurationsDocument13 pagesComparison of Four-Wheel-Drive Hybrid Powertrain ConfigurationsCostin DanielNo ratings yet
- A Study of Energy Requirements For Electric and HyDocument9 pagesA Study of Energy Requirements For Electric and HyAntoine LemaireNo ratings yet
- System Design and Realization of A Solar-Powered Electric Vehicle Charging StationDocument12 pagesSystem Design and Realization of A Solar-Powered Electric Vehicle Charging StationankitabhuNo ratings yet
- 000 NVSD 2019 0353.R1 - Clean - EditableDocument23 pages000 NVSD 2019 0353.R1 - Clean - EditableCloudIIINo ratings yet
- Generation of Electrical Energy Using Hybrid Energy of PV Solar Cell, Wind Turbine, Rain Water and Perpetual MotionDocument10 pagesGeneration of Electrical Energy Using Hybrid Energy of PV Solar Cell, Wind Turbine, Rain Water and Perpetual MotionGhafar HassanNo ratings yet
- SRG For VHDocument6 pagesSRG For VHsathishNo ratings yet
- Guide To Reading Your Data Subject Access Request: Primary Personal Data StorageDocument2 pagesGuide To Reading Your Data Subject Access Request: Primary Personal Data StoragegesfNo ratings yet
- Electrical/Computer Engineering Design Project ProposalDocument1 pageElectrical/Computer Engineering Design Project Proposalsanjay sahNo ratings yet
- Energy Implications of Data CentersDocument8 pagesEnergy Implications of Data Centerssanjay sahNo ratings yet
- NTC Syllabus 1st Paper Level 7Document4 pagesNTC Syllabus 1st Paper Level 7sanjay sahNo ratings yet
- 03 Abstract PDFDocument2 pages03 Abstract PDFsanjay sahNo ratings yet
- 19 AppendixDocument19 pages19 AppendixJithendra NathNo ratings yet
- Cement PlantDocument232 pagesCement PlantAnonymous iI88Lt100% (1)
- 476ASBA Notice PDFDocument1 page476ASBA Notice PDFsanjay sahNo ratings yet
- Syllabus Eng ComputerDocument5 pagesSyllabus Eng ComputerKaali PutraNo ratings yet
- Reliability Well-Being Assessment of PV-Wind Hybrid System Using Monte Carlo SimulationDocument6 pagesReliability Well-Being Assessment of PV-Wind Hybrid System Using Monte Carlo Simulationsanjay sahNo ratings yet
- ELT SanjayDocument5 pagesELT Sanjaysanjay sahNo ratings yet
- NTdata FormDocument2 pagesNTdata Formsanjay sahNo ratings yet
- IEEE 34 Node Test FeederDocument8 pagesIEEE 34 Node Test Feedersanjay sahNo ratings yet
- Superviser (Electrical) 5Document3 pagesSuperviser (Electrical) 5Avik PoudelNo ratings yet
- Civil 7Document4 pagesCivil 7avseqNo ratings yet
- Implementing DG to Improve Conditions in Radial Distribution FeederDocument7 pagesImplementing DG to Improve Conditions in Radial Distribution Feedersanjay sahNo ratings yet
- 2013 TENCON ModelingAndValidationDocument5 pages2013 TENCON ModelingAndValidationsanjay sahNo ratings yet
- Superviser (Electrical) 5Document3 pagesSuperviser (Electrical) 5Avik PoudelNo ratings yet
- Maharashtra State Electricity Distribution Co. LTD.: Technical SpecificationsDocument14 pagesMaharashtra State Electricity Distribution Co. LTD.: Technical SpecificationsHeeresh TiwariNo ratings yet
- The Impact of Distributed Generation in The Distribution Networks' Voltage Profile and Energy LossesDocument6 pagesThe Impact of Distributed Generation in The Distribution Networks' Voltage Profile and Energy Lossessanjay sahNo ratings yet
- The Impact of Distributed Generation in The Distribution Networks' Voltage Profile and Energy LossesDocument6 pagesThe Impact of Distributed Generation in The Distribution Networks' Voltage Profile and Energy Lossessanjay sahNo ratings yet
- 1-Body PartDocument69 pages1-Body PartNicole FreitasNo ratings yet
- Video PDFDocument9 pagesVideo PDFsanjay sahNo ratings yet
- NodalDocument81 pagesNodalsanjay sahNo ratings yet
- ch12-Alternating-Current CircuitsDocument41 pagesch12-Alternating-Current Circuitsmehdii.heidary1366100% (1)
- Gridlabd BrochureDocument4 pagesGridlabd Brochurealexev1984No ratings yet
- Cable Design Formulas: Weight of ConductorDocument3 pagesCable Design Formulas: Weight of Conductorsanjay sah0% (1)
- 1 & 2 Semester Curriculum For Diploma in Engineering (Effective From 2013-14 Academic Session)Document39 pages1 & 2 Semester Curriculum For Diploma in Engineering (Effective From 2013-14 Academic Session)sanjay sahNo ratings yet
- Iqrf, Flqfoq: FDQD VQNDocument4 pagesIqrf, Flqfoq: FDQD VQNpramodNo ratings yet
- Development of Boost Converter For MIRAI: Yoshinobu Hasuka, Hiroyuki Sekine, Koji Katano, and Yasuhiro NonobeDocument6 pagesDevelopment of Boost Converter For MIRAI: Yoshinobu Hasuka, Hiroyuki Sekine, Koji Katano, and Yasuhiro NonobeLuis Felipe Colque MirandaNo ratings yet
- Nissan EssentialsDocument17 pagesNissan Essentials03JMercadoNo ratings yet
- Operation and Performance Evaluation of Novel Electric-Wheel-Driven Hybrid-Electric Propulsion Systems On Standard Short Range Passenger AirplanesDocument17 pagesOperation and Performance Evaluation of Novel Electric-Wheel-Driven Hybrid-Electric Propulsion Systems On Standard Short Range Passenger AirplanesMiguel Angel AguirreNo ratings yet
- Toyota's Five Forces AnalysisDocument13 pagesToyota's Five Forces AnalysisMadhuNo ratings yet
- FS East 2023 Rules Formatted v1.0Document55 pagesFS East 2023 Rules Formatted v1.0AsharNo ratings yet
- Value Chain Innovation ReportDocument19 pagesValue Chain Innovation Reportquanghao1991No ratings yet
- Ownership Cost Comparison of Battery Electric and Non-Plugin Hybrid Vehicles: A Consumer PerspectiveDocument14 pagesOwnership Cost Comparison of Battery Electric and Non-Plugin Hybrid Vehicles: A Consumer Perspectivesam crippsNo ratings yet
- Energy Management System in HEV Using PI ControllerDocument5 pagesEnergy Management System in HEV Using PI ControllerSekhar ReddyNo ratings yet
- Case StudyDocument15 pagesCase StudyAamir SaleemNo ratings yet
- Hybrid Electric and Battery Electric Vehicles - Measures To Stimulate UptakeDocument43 pagesHybrid Electric and Battery Electric Vehicles - Measures To Stimulate UptakeAndrew DanielNo ratings yet
- Designing Electric Vehicle Incentives To Meet EmissionDocument20 pagesDesigning Electric Vehicle Incentives To Meet Emissionyogita borudeNo ratings yet
- Kunci Jawaban Buku Advanced Accounting Fifth EditionDocument2 pagesKunci Jawaban Buku Advanced Accounting Fifth EditionSantiNo ratings yet
- BBM - 978 3 030 85424 9 - 1Document15 pagesBBM - 978 3 030 85424 9 - 1George Florin CaraimanNo ratings yet
- Rwanda Unveils New Incentives To Drive Electric Vehicle UptakeDocument3 pagesRwanda Unveils New Incentives To Drive Electric Vehicle Uptakemèo blinksNo ratings yet
- CBA EV Research Note 1688437063Document24 pagesCBA EV Research Note 1688437063David ChengNo ratings yet
- Structural White Paper EN FinalDocument7 pagesStructural White Paper EN FinalgorkaNo ratings yet
- Enabling EV Charging in CondominiumsDocument24 pagesEnabling EV Charging in Condominiumsdaniel SegallNo ratings yet
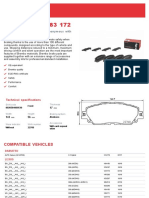
- Brembo Brake Pad P 83 172Document3 pagesBrembo Brake Pad P 83 172SufyanAbushaalaNo ratings yet
- Home Power Magazine - Issue 008 - 1988-12-1989-01 PDFDocument48 pagesHome Power Magazine - Issue 008 - 1988-12-1989-01 PDFwienslaw5804No ratings yet
- Toyota International MarketingDocument8 pagesToyota International MarketingBiju MathewsNo ratings yet
- Batteriesfor Electric VehiclesDocument8 pagesBatteriesfor Electric VehiclesEnquiryNo ratings yet
- Electrical and Hybrid VehiclesDocument2 pagesElectrical and Hybrid VehiclesAnonymous HyOfbJ6No ratings yet
- Parameter 14 Ah Battery Lifepo4Document70 pagesParameter 14 Ah Battery Lifepo4Andri PratamaNo ratings yet
- Volvo EV Case StudyDocument8 pagesVolvo EV Case StudyUSMAN TANVIRNo ratings yet
- Hyundai RegionalDocument43 pagesHyundai Regionalhariom sharmaNo ratings yet
- (Tự học SAT) - Khan academy reading - Diagnostic tests vol.1 PDFDocument30 pages(Tự học SAT) - Khan academy reading - Diagnostic tests vol.1 PDFTuan NguyenNo ratings yet
- Evida LawDocument12 pagesEvida LawMJ ReandelarNo ratings yet
- Govt Islamia College, For Women, Eidgah Road, FSD: AssignmentDocument17 pagesGovt Islamia College, For Women, Eidgah Road, FSD: AssignmentNoman AliNo ratings yet
- Strategic Analysis of Honda's Power of DreamsDocument11 pagesStrategic Analysis of Honda's Power of DreamsGunjjan SharmaNo ratings yet
- Market Monitor: European Passenger Car and Light Commercial Vehicle Registrations, January-December 2021Document7 pagesMarket Monitor: European Passenger Car and Light Commercial Vehicle Registrations, January-December 2021The International Council on Clean TransportationNo ratings yet