You might also like
- Aircraft Design Project 2Document120 pagesAircraft Design Project 2Sandeep NrynNo ratings yet
- Wind Tunnel Technique Notes For Aeronautical Engineers TP 1Document2 pagesWind Tunnel Technique Notes For Aeronautical Engineers TP 1Adarsh KumarNo ratings yet
- Load Carrying StructuresDocument22 pagesLoad Carrying StructuresNkemakolam Celestine ChukwuNo ratings yet
- Content: Part-66 Module 11A. Turbine Airplane Aerodynamics, Structures and SystemsDocument5 pagesContent: Part-66 Module 11A. Turbine Airplane Aerodynamics, Structures and SystemsJaafar Ali MohamadNo ratings yet
- Rr312102 Aircraft PerformanceDocument8 pagesRr312102 Aircraft PerformanceSrinivasa Rao GNo ratings yet
- AEMR-Unit - II & III, 2 Marks & 16 Marks Questions With Anwers-IV Yr AeroDocument39 pagesAEMR-Unit - II & III, 2 Marks & 16 Marks Questions With Anwers-IV Yr AeroRAJASUDHAKAR SNo ratings yet
- Fis Book 3 Index: AirframeDocument175 pagesFis Book 3 Index: Airframeabhishek soniNo ratings yet
- Data Collection and Preliminary 3 View DesignDocument5 pagesData Collection and Preliminary 3 View DesignBrijesh PatelNo ratings yet
- NR 322106 Aircraft Design PracticeDocument8 pagesNR 322106 Aircraft Design PracticeSrinivasa Rao GNo ratings yet
- Final Syllabus 5-6th SemDocument29 pagesFinal Syllabus 5-6th SemParkash SinghNo ratings yet
- Whole Ac StructureDocument22 pagesWhole Ac StructureLara SeverinoNo ratings yet
- Ilities of AvionicsDocument9 pagesIlities of AvionicsHariNo ratings yet
- Classroom Activities in Aerodynamics: © 2000 Dr. Charley Rodriguez, PH.DDocument21 pagesClassroom Activities in Aerodynamics: © 2000 Dr. Charley Rodriguez, PH.DAerocse EceitmechNo ratings yet
- AE8302-Elements of Aeronautical Engineering: Reg. NoDocument2 pagesAE8302-Elements of Aeronautical Engineering: Reg. NoViswanath ViswaNo ratings yet
- Alignment 1Document64 pagesAlignment 1eng_moh04No ratings yet
- Chapter 3 PT 1 N 2-Theory of FLightDocument23 pagesChapter 3 PT 1 N 2-Theory of FLightzuliana_ismail8564100% (1)
- Wind Tunnel Pope PDFDocument20 pagesWind Tunnel Pope PDFKrmxl Tdre100% (1)
- 7 TH Sem AdpDocument56 pages7 TH Sem AdpJackson JackNo ratings yet
- MAE3241 Ch01 IntroductionDocument20 pagesMAE3241 Ch01 Introductionmblaskovich2010No ratings yet
- VN DiagramDocument10 pagesVN DiagramIrfan SiddiquiNo ratings yet
- Aircraft Systems - Lec 3Document36 pagesAircraft Systems - Lec 3aahsan345100% (1)
- Industrial AerodynamicsDocument78 pagesIndustrial AerodynamicsAnuNo ratings yet
- Unmanned Aircraft SystemsFrom EverandUnmanned Aircraft SystemsElla AtkinsNo ratings yet
- LIST of CHAPTER Turbine Aeroplane Aerodynamics, Structures and Systems - Aircraft EngineerAircraft EngineerDocument5 pagesLIST of CHAPTER Turbine Aeroplane Aerodynamics, Structures and Systems - Aircraft EngineerAircraft EngineergeslincarlombetahNo ratings yet
- Airframe and Construction RepairDocument86 pagesAirframe and Construction Repairaerogem618No ratings yet
- Lecture Notes Aerospace PropulsionDocument104 pagesLecture Notes Aerospace PropulsionJuan GarcíaNo ratings yet
- Wind Tunnel InroductionDocument38 pagesWind Tunnel Inroductionmich48chinNo ratings yet
- Unit I Introduction To Design For Static StrengthDocument47 pagesUnit I Introduction To Design For Static StrengthSanketHedduri0% (2)
- Department of Aeronauticalengineering Ae 2204 - Elements of Aeronautics Question Bank Part ADocument6 pagesDepartment of Aeronauticalengineering Ae 2204 - Elements of Aeronautics Question Bank Part AparathNo ratings yet
- Structural Components of Aircraft: Ae 6502 Aircraft Structures - Ii Unit V Stress Analysis of Wing and FuselageDocument20 pagesStructural Components of Aircraft: Ae 6502 Aircraft Structures - Ii Unit V Stress Analysis of Wing and FuselageDamo Daran GNo ratings yet
- WING SPAR PresentationDocument67 pagesWING SPAR PresentationravutumadiNo ratings yet
- Aircraft Structures 1Document6 pagesAircraft Structures 1ntrjn100% (1)
- CH 05 - Flight Controls PDFDocument12 pagesCH 05 - Flight Controls PDFFahmi PrayogiNo ratings yet
- Ae2302 NolDocument42 pagesAe2302 NolShwetha BhatNo ratings yet
- AS1 FormatDocument97 pagesAS1 FormatgurusamyNo ratings yet
- LDG Gear s300Document12 pagesLDG Gear s300rizaviator6097No ratings yet
- Aircraft Stability and ControlDocument2 pagesAircraft Stability and ControlSaravanan AtthiappanNo ratings yet
- MIDTERM Lesson 1 MSGDocument24 pagesMIDTERM Lesson 1 MSGJohn Ericsson RobariosNo ratings yet
- B. Tech. (H) SyllabusDocument42 pagesB. Tech. (H) SyllabusMahendra DhadweNo ratings yet
- Landing Gear - Loading CalcualtionsDocument3 pagesLanding Gear - Loading CalcualtionsSakib HossainNo ratings yet
- Fuel Injection & TurbochargingDocument4 pagesFuel Injection & Turbocharging6 avinashNo ratings yet
- Landing Gear Arrangement - 5 Main Components of An AircraftDocument8 pagesLanding Gear Arrangement - 5 Main Components of An AircraftSuVam LeoChanNo ratings yet
- Ae8302 Elements of Aeronautical Engineering Part B & Part C Questions - Unit WiseDocument1 pageAe8302 Elements of Aeronautical Engineering Part B & Part C Questions - Unit WiseShobiNo ratings yet
- Aircraft Structures: Lecture TopicsDocument20 pagesAircraft Structures: Lecture TopicsLathi RajNo ratings yet
- Aircraft PerformanceDocument2 pagesAircraft PerformanceAishwarya Ravi0% (1)
- ME45002 Aircraft Systems PDFDocument3 pagesME45002 Aircraft Systems PDFVanessa HaliliNo ratings yet
- Aircraft Landing Gear System: Presented By: Rishikesh K. Singh Roll No. 134103054 Guided by Dr. Ujjwal Kumar SahaDocument39 pagesAircraft Landing Gear System: Presented By: Rishikesh K. Singh Roll No. 134103054 Guided by Dr. Ujjwal Kumar SahaindahNo ratings yet
- Aircraft Structures 1Document6 pagesAircraft Structures 1Daniel Antony100% (1)
- Pneumatic System: GP CPT Md. Abdus SalamDocument31 pagesPneumatic System: GP CPT Md. Abdus SalamMuhammedNayeemNo ratings yet
- Experimental Stress AnalysisDocument194 pagesExperimental Stress AnalysisJEEVA KUMAR M100% (1)
- Conceptual Design of A Business Jet Airc PDFDocument6 pagesConceptual Design of A Business Jet Airc PDFHamza TurhanNo ratings yet
- Chapter 3Document54 pagesChapter 3chiragNo ratings yet
- Free Wing Uav: Akram September 7, 2015Document8 pagesFree Wing Uav: Akram September 7, 2015mraeroNo ratings yet
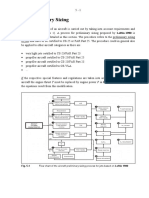
- 5 Preliminary Sizing: Flow Chart of The Aircraft Preliminary Sizing Process For Jets Based On Loftin 1980Document32 pages5 Preliminary Sizing: Flow Chart of The Aircraft Preliminary Sizing Process For Jets Based On Loftin 1980kishor jagtapNo ratings yet
- 5 Preliminary Sizing: Flow Chart of The Aircraft Preliminary Sizing Process For Jets Based On Loftin 1980Document32 pages5 Preliminary Sizing: Flow Chart of The Aircraft Preliminary Sizing Process For Jets Based On Loftin 1980althafalthafNo ratings yet
- AAE 3104 CH 3 Constraint Analysis and Aircraft SizingDocument44 pagesAAE 3104 CH 3 Constraint Analysis and Aircraft SizingDpt HtegnNo ratings yet
- Aircraft DesignDocument216 pagesAircraft DesignDivya SrinivasanNo ratings yet
- Lecture Note 2Document56 pagesLecture Note 2Tolga Burak UysalNo ratings yet
- Parts of An Airplane FuselageDocument4 pagesParts of An Airplane Fuselagevorontsovsky11No ratings yet
- Safety and Relief Valve Test ProgramDocument47 pagesSafety and Relief Valve Test ProgramRomul KNo ratings yet
- L03 Teaching AerodynamicsDocument20 pagesL03 Teaching AerodynamicsDragan Lazic100% (1)
- Crane Safe Opr MNT TATADocument32 pagesCrane Safe Opr MNT TATADishant MathurNo ratings yet
- L = 1/2 ρ v C SDocument12 pagesL = 1/2 ρ v C SAmit ShrivastavaNo ratings yet
- Low Reynolds Number Aerodynamics and TransitionDocument172 pagesLow Reynolds Number Aerodynamics and TransitionJosé RamírezNo ratings yet
- Farris 4200 Series PRV IOM 806T - R1Document12 pagesFarris 4200 Series PRV IOM 806T - R1Chirasak PaksasornNo ratings yet
- Causes of Vibration For Steam TurbineDocument21 pagesCauses of Vibration For Steam TurbineAugustine Owo Ukpong100% (6)
- Force and Newton's Laws of MotionDocument8 pagesForce and Newton's Laws of MotionUJJVAL GAHOINo ratings yet
- Two-Dimensional Airfoil TheoryDocument28 pagesTwo-Dimensional Airfoil TheoryNavaneeth Krishnan BNo ratings yet
- Tutorial 3 Airfoil: Problem SpecificationDocument25 pagesTutorial 3 Airfoil: Problem Specificationcheh han seumNo ratings yet
- WindturbinebladedesignDocument27 pagesWindturbinebladedesignDaizLee AhmadNo ratings yet
- Pressure Vacuum Relief Valve GuideDocument83 pagesPressure Vacuum Relief Valve Guidefinekay100% (2)
- Army Aviation Maintenance CourseDocument15 pagesArmy Aviation Maintenance CourseEagle1968100% (1)
- 15330-Article Text-54951-2-10-20211007Document10 pages15330-Article Text-54951-2-10-20211007Moayad Al KadryNo ratings yet
- Gas Lift Design-Form (1) 2022Document41 pagesGas Lift Design-Form (1) 2022Ayoub K MohammedNo ratings yet
- Wing-Winglet Design Methodology For Low Speed ApplicationsDocument11 pagesWing-Winglet Design Methodology For Low Speed Applicationsfelip987No ratings yet
- Lab05 - Wing FSI (Lab)Document64 pagesLab05 - Wing FSI (Lab)Guillermo Avila RiveraNo ratings yet
- Falling Paper: Navier-Stokes Solutions, Model of Fluid Forces, and Center of Mass ElevationDocument4 pagesFalling Paper: Navier-Stokes Solutions, Model of Fluid Forces, and Center of Mass ElevationCarlos Andrés del ValleNo ratings yet
- Aviation Fundamentals 1 - FlightDocument51 pagesAviation Fundamentals 1 - FlightppNo ratings yet
- Aeroacoustic Optimization of Wind Turbine Airfoils by Combining Thermographic and Acoustic Measurement DataDocument4 pagesAeroacoustic Optimization of Wind Turbine Airfoils by Combining Thermographic and Acoustic Measurement DatamoussaouiNo ratings yet
- 205 STEM ChallengeDocument3 pages205 STEM ChallengePelik GobrielNo ratings yet
- Exercises Lecture 3 - Answers: Climbing and Descending FlightDocument9 pagesExercises Lecture 3 - Answers: Climbing and Descending FlightBaptisteNo ratings yet
- Flying WingDocument7 pagesFlying Wingp6a4nduNo ratings yet
- Aerospace EngineeringDocument7 pagesAerospace EngineeringRRNo ratings yet
- Airfoils Lift and Drag Forces Acting On A Wing Section: Equal Amounts of Thickness Is Added To Camber InaDocument4 pagesAirfoils Lift and Drag Forces Acting On A Wing Section: Equal Amounts of Thickness Is Added To Camber InaMat HarzickNo ratings yet
- Low Speed Aerodynamics Piercy Aerofoil Lab ReportDocument7 pagesLow Speed Aerodynamics Piercy Aerofoil Lab Reportsilvia100% (1)
- Design and Analysis of Marine Propeller With Leading-Edge ProtuberancesDocument7 pagesDesign and Analysis of Marine Propeller With Leading-Edge ProtuberancesIJRASETPublicationsNo ratings yet
- Graders: Grader ComponentsDocument18 pagesGraders: Grader ComponentsSarmad A. AzizNo ratings yet