You might also like
- 1MRK508019-BEN A en Fuse Supervisory Relays RXBA 4 RXETB 1 PDFDocument6 pages1MRK508019-BEN A en Fuse Supervisory Relays RXBA 4 RXETB 1 PDFUmanshu PandeyNo ratings yet
- MVAXDocument24 pagesMVAXkedsoi2No ratings yet
- JVS Manual JRP 011Document12 pagesJVS Manual JRP 011Tamilventhan_sNo ratings yet
- Micom - 211 Motor Protection Relay Used For 275kwDocument8 pagesMicom - 211 Motor Protection Relay Used For 275kwShrikant KajaleNo ratings yet
- Testing Numerical Transformer Diff RelaysDocument11 pagesTesting Numerical Transformer Diff Relayshizbi70% (1)
- CMA9 MOTOR DRIVE ManualDocument29 pagesCMA9 MOTOR DRIVE ManualAshraf NazifNo ratings yet
- Mifii: Digital Feeder Protection With RecloserDocument187 pagesMifii: Digital Feeder Protection With Reclosersehili ammarNo ratings yet
- ADR241CDocument11 pagesADR241CNamrata ShettiNo ratings yet
- P631 Up To P634: Transformer Differential Protection DevicesDocument32 pagesP631 Up To P634: Transformer Differential Protection DevicestunghtdNo ratings yet
- CSC 326 ManualDocument86 pagesCSC 326 ManualSushant KadavNo ratings yet
- SR61CDocument3 pagesSR61CSubramaniam NPNo ratings yet
- Epac 3000 Rev2 Hardware Manual Rev 1.0Document33 pagesEpac 3000 Rev2 Hardware Manual Rev 1.0Anonymous ouFzvkzNo ratings yet
- IRI PRO V3 CatalogueDocument14 pagesIRI PRO V3 CatalogueThomas Joseph100% (2)
- Micom P211 Three-Phase Motor Protection Relay: Energy Automation & InformationDocument10 pagesMicom P211 Three-Phase Motor Protection Relay: Energy Automation & InformationAONLANo ratings yet
- 1MRB520006-BEN en XS92b Computer-Based 3-Phase Test SetDocument14 pages1MRB520006-BEN en XS92b Computer-Based 3-Phase Test SetFredrikNo ratings yet
- Relay Type / Make: GE T60 General Data:: SYS FmaxDocument6 pagesRelay Type / Make: GE T60 General Data:: SYS FmaxAntony JoeNo ratings yet
- P632 EN M R-32-D 311 652 Volume 2Document444 pagesP632 EN M R-32-D 311 652 Volume 2Đặng Phước ĐứcNo ratings yet
- Commissioning Numerical Relays GuideDocument24 pagesCommissioning Numerical Relays GuideVHMANOHARNo ratings yet
- 7SJ80xx Manual A5 V041001 UsDocument550 pages7SJ80xx Manual A5 V041001 UsAlexandre Moreno100% (1)
- Horm 4Document6 pagesHorm 4suchandrar100% (2)
- REB500 Relay PDFDocument72 pagesREB500 Relay PDFmmsa100% (1)
- R5582E RELAY Selection GuideDocument14 pagesR5582E RELAY Selection GuideChandra Hamidi KautsarNo ratings yet
- Uploads Product Rishmaster EM3490 1PH Manual PDFDocument2 pagesUploads Product Rishmaster EM3490 1PH Manual PDFKo PaukNo ratings yet
- Transformer REFDocument4 pagesTransformer REFs_banerjeeNo ratings yet
- Design and Results of Differential Relay Settings For Power Transformers 80MVA, 40MVA and 100MVADocument3 pagesDesign and Results of Differential Relay Settings For Power Transformers 80MVA, 40MVA and 100MVAMatthew Wong100% (1)
- Protective Relaying Testing ST6Document6 pagesProtective Relaying Testing ST6Darwin MesaNo ratings yet
- KTU 2018-22 Calculus Question Paper PDFDocument3 pagesKTU 2018-22 Calculus Question Paper PDFsunNo ratings yet
- Type P8n, PQ8n, PN8n: Auxiliary RelayDocument7 pagesType P8n, PQ8n, PN8n: Auxiliary RelayDinesh ThevanNo ratings yet
- 12 - Transformer ProtectionDocument40 pages12 - Transformer ProtectionSarthak Vats100% (2)
- Calculation of Stabilizing Resistor in High Impedance Differential Protection - Electrical ConceptsDocument13 pagesCalculation of Stabilizing Resistor in High Impedance Differential Protection - Electrical ConceptsABHINAV SAURAVNo ratings yet
- REL 531-1-0 Line Distance Protection TerminalDocument20 pagesREL 531-1-0 Line Distance Protection Terminalsenthil kumarNo ratings yet
- Application Configuration RET615Document25 pagesApplication Configuration RET615Pedro Puma0% (1)
- 7sd52 7sd62 ConfigurationDocument14 pages7sd52 7sd62 ConfigurationWilber LucasNo ratings yet
- Automatic Voltage Regulating Relay EE 301-M: Instruction ManualDocument22 pagesAutomatic Voltage Regulating Relay EE 301-M: Instruction ManualnarendragahlotNo ratings yet
- Trivector MeterDocument2 pagesTrivector MeterTarun AhujaNo ratings yet
- VTXDocument6 pagesVTXHari Krishna.MNo ratings yet
- TRF Protection Relay Manual Spad PDFDocument16 pagesTRF Protection Relay Manual Spad PDFNesarkiran BagadeNo ratings yet
- Auto Synchronizing and Auto Load Sharing: in The Name of Allah, The Beneficent, The MercifulDocument26 pagesAuto Synchronizing and Auto Load Sharing: in The Name of Allah, The Beneficent, The Mercifulkhalidfarooq009No ratings yet
- Busbar ProtectionDocument44 pagesBusbar ProtectionM. AsrorNo ratings yet
- Protocol Converter NR PCS 9794Document3 pagesProtocol Converter NR PCS 9794kakakNo ratings yet
- Vagm 22Document4 pagesVagm 22AONLANo ratings yet
- TR112Document4 pagesTR112ranjith kumarNo ratings yet
- ABB REL670 V1.B A32 Template Manual ENU TU3.00 V1.000 PDFDocument17 pagesABB REL670 V1.B A32 Template Manual ENU TU3.00 V1.000 PDFWafa Imene BouhaddaNo ratings yet
- Radio and TV Antenna Protection SystemDocument42 pagesRadio and TV Antenna Protection SystemBhanu Prakash100% (1)
- Approval Setting P142 - CBB-dikonversiDocument5 pagesApproval Setting P142 - CBB-dikonversiNurul MukhlisiahNo ratings yet
- Causes of Over Fluxing in TransformerDocument3 pagesCauses of Over Fluxing in TransformerHamayoun Murtaza0% (1)
- Application of Undervoltage Protection To Critical Motors PDFDocument6 pagesApplication of Undervoltage Protection To Critical Motors PDFarisNo ratings yet
- Micom P630C: Transformer Differential Protection DeviceDocument396 pagesMicom P630C: Transformer Differential Protection Devicemari78svksNo ratings yet
- XS2 - Negative Sequence Relay: Original Technical Manual XS2 (Revision B)Document20 pagesXS2 - Negative Sequence Relay: Original Technical Manual XS2 (Revision B)Catrina FedericoNo ratings yet
- Tap Changer IonDocument6 pagesTap Changer IonS ManoharNo ratings yet
- Distance Relay Testing ReportDocument11 pagesDistance Relay Testing ReportYahya DarNo ratings yet
- p345 Technical ManualDocument1 pagep345 Technical ManualabhayambujNo ratings yet
- Jvs Manual JRD 011Document5 pagesJvs Manual JRD 011ashutosh20090% (1)
- ADR233BDocument19 pagesADR233BNamrata ShettiNo ratings yet
- The Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsFrom EverandThe Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsNo ratings yet
- Mathematical Model of Flexible Alternating Current Link Based On Phase-Shifting Transformer With Circular Rotation of The Phase AngleDocument6 pagesMathematical Model of Flexible Alternating Current Link Based On Phase-Shifting Transformer With Circular Rotation of The Phase AngleCosmic GateNo ratings yet
- Doble - Symmetrical Type Phase Shifting Transformers Basic Relay Protection PDFDocument25 pagesDoble - Symmetrical Type Phase Shifting Transformers Basic Relay Protection PDFsulemankhalidNo ratings yet
- Developments in Insulating Paper For Pow PDFDocument30 pagesDevelopments in Insulating Paper For Pow PDFDante FilhoNo ratings yet
- Investigation and Understanding The Conditions of Power Transformer Internal Faults Using On-Line TechniqueDocument6 pagesInvestigation and Understanding The Conditions of Power Transformer Internal Faults Using On-Line TechniqueDante FilhoNo ratings yet
- Ideal Transformer Losses: Cooling Methods For Oil Immersed Transformers Oil Natural Air Natural (ONAN)Document2 pagesIdeal Transformer Losses: Cooling Methods For Oil Immersed Transformers Oil Natural Air Natural (ONAN)Dante FilhoNo ratings yet
- Investigation of Transformer Insulation at High Frequencies and High VoltagesDocument3 pagesInvestigation of Transformer Insulation at High Frequencies and High VoltagesDante FilhoNo ratings yet
- Case 4Document13 pagesCase 4Maz NdaNo ratings yet
- Comparative study reveals nitrogen saturation as most effective moisture removal technique for mineral oilDocument6 pagesComparative study reveals nitrogen saturation as most effective moisture removal technique for mineral oilDante FilhoNo ratings yet
- Examination On The Parameter Stability Region of TDocument5 pagesExamination On The Parameter Stability Region of TDante FilhoNo ratings yet
- Numerical Prediction of Maximum Magnetizing Inrush Current in Power Transformers Based On Design Parameters IJERTV3IS050551 PDFDocument4 pagesNumerical Prediction of Maximum Magnetizing Inrush Current in Power Transformers Based On Design Parameters IJERTV3IS050551 PDFDante FilhoNo ratings yet
- Effects of Nanoparticles Materials On Heat TransfeDocument22 pagesEffects of Nanoparticles Materials On Heat TransfeDante FilhoNo ratings yet
- Transformer Engineering-Design and Practice (Book Review) : IEEE Electrical Insulation Magazine August 2005Document3 pagesTransformer Engineering-Design and Practice (Book Review) : IEEE Electrical Insulation Magazine August 2005Dante FilhoNo ratings yet
- The Diagnostic Power of Oil Analysis For Power Transformers: New DevelopmentsDocument5 pagesThe Diagnostic Power of Oil Analysis For Power Transformers: New DevelopmentsDante FilhoNo ratings yet
- Experimental Validation of A New Methodology To Reduce Hot Spots On The Screws of Power Transformer TanksDocument5 pagesExperimental Validation of A New Methodology To Reduce Hot Spots On The Screws of Power Transformer TanksDante FilhoNo ratings yet
- High Silicon Steel Sheets Realizing Excellent High Frequency Reactor PerformanceDocument6 pagesHigh Silicon Steel Sheets Realizing Excellent High Frequency Reactor PerformanceDante FilhoNo ratings yet
- A New Method Presentation For Fault Location in Power TransformersDocument6 pagesA New Method Presentation For Fault Location in Power TransformersDante FilhoNo ratings yet
- Transient Recovery Voltage Requirements Associated With The Application of Current-Limiting Series ReactorsDocument6 pagesTransient Recovery Voltage Requirements Associated With The Application of Current-Limiting Series ReactorsDante FilhoNo ratings yet
- 97 MIPSYCON Power Transformer Life Cycle Cost ReductionDocument11 pages97 MIPSYCON Power Transformer Life Cycle Cost ReductioncalripkenNo ratings yet
- Index of - Iceps - Icen10 - Frames - ArticlesDocument1 pageIndex of - Iceps - Icen10 - Frames - ArticlesDante FilhoNo ratings yet
- Voltage Distribution Over Suspension Insulator - String EfficiencyDocument6 pagesVoltage Distribution Over Suspension Insulator - String EfficiencyDante FilhoNo ratings yet
- 2017 03 31 4th International Colloquium FinalDocument11 pages2017 03 31 4th International Colloquium FinalDante FilhoNo ratings yet
- FerroresonanceDocument12 pagesFerroresonanceajayvar87No ratings yet
- 1665 6423 Jart 14 02 00087Document6 pages1665 6423 Jart 14 02 00087Dante FilhoNo ratings yet
- Review of Distinguishing Schemes For Pow PDFDocument8 pagesReview of Distinguishing Schemes For Pow PDFDante FilhoNo ratings yet
- ReferenceDocument8 pagesReferenceailgeviciusNo ratings yet
- 118 UriondoDocument5 pages118 Uriondocosmin75No ratings yet
- ABB Testing Laboratories AccreditedDocument8 pagesABB Testing Laboratories AccreditedDante FilhoNo ratings yet
- Pattern Recognition to Distinguish Faults from InrushesDocument7 pagesPattern Recognition to Distinguish Faults from InrushesDante FilhoNo ratings yet
- B 01 RCC Approved Dec5 2017Document8 pagesB 01 RCC Approved Dec5 2017Dante FilhoNo ratings yet
- Power Transformer Inrush CurrentDocument10 pagesPower Transformer Inrush CurrentDulon22No ratings yet
- ANSI IEEE-IEC-ComparisonDocument For TransformersDocument42 pagesANSI IEEE-IEC-ComparisonDocument For TransformersM Kumar Marimuthu50% (2)
- Appendix 1 Bulk Electric SystemDocument19 pagesAppendix 1 Bulk Electric SystemDante FilhoNo ratings yet
- Syllabus - Civil EnggDocument129 pagesSyllabus - Civil EnggAnkita SinghNo ratings yet
- Tl-wn722n v1 User GuideDocument41 pagesTl-wn722n v1 User GuideSadam LashariNo ratings yet
- Marmara University EE3082 Communication Engineering Sampling and QuantizationDocument23 pagesMarmara University EE3082 Communication Engineering Sampling and QuantizationMuhammed Bekir AdamNo ratings yet
- Physics of Solar Panels: Cost, Efficiency and EffectivenessDocument26 pagesPhysics of Solar Panels: Cost, Efficiency and EffectivenessButchNo ratings yet
- Fostering A Culture of Innovation: The Role of Leadership: Jaideep Prabhu October 2018Document90 pagesFostering A Culture of Innovation: The Role of Leadership: Jaideep Prabhu October 2018shanikaNo ratings yet
- Robotics Interview Questions: 1) What Do You Understand by The Term, The Robotics?Document9 pagesRobotics Interview Questions: 1) What Do You Understand by The Term, The Robotics?Kartik AgarwalNo ratings yet
- ABB - End To End Embedded Power GuideDocument64 pagesABB - End To End Embedded Power Guidemher bakalianNo ratings yet
- General purpose plastic rectifier specifications and data sheetDocument3 pagesGeneral purpose plastic rectifier specifications and data sheetSahil AggarwalNo ratings yet
- Numaapi3 PDFDocument12 pagesNumaapi3 PDFfermarioNo ratings yet
- STPS3045CT/CG/CP/CPI/CW Power Schottky Rectifier Spec SheetDocument9 pagesSTPS3045CT/CG/CP/CPI/CW Power Schottky Rectifier Spec SheetLed EngNo ratings yet
- Oblique Incidence and Snel's LawsDocument31 pagesOblique Incidence and Snel's LawsAnonymous Th1S33No ratings yet
- PRP TutorialDocument0 pagesPRP TutorialsuudonNo ratings yet
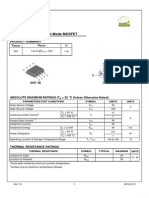
- N-Channel Enhancement Mode MOSFET: Product SummaryDocument5 pagesN-Channel Enhancement Mode MOSFET: Product SummaryTony RodriguesNo ratings yet
- Final Report Isp543Document41 pagesFinal Report Isp543Alya NazriNo ratings yet
- Service Manual: DEH-P4350Document67 pagesService Manual: DEH-P4350Lolo SortoNo ratings yet
- Doosan Schematic All ModelsDocument20 pagesDoosan Schematic All Modelsstanley100% (53)
- Product Datasheet: P CLAS A 75 10.5 W/827 E27 FRDocument4 pagesProduct Datasheet: P CLAS A 75 10.5 W/827 E27 FRtcm sumbagselNo ratings yet
- HP L1908LW Service ManualDocument43 pagesHP L1908LW Service Manualscandisk66No ratings yet
- Advantages of Replacement To A Chip Varistor and Selection PointsDocument16 pagesAdvantages of Replacement To A Chip Varistor and Selection PointsmanojkumarNo ratings yet
- SW5 L30 DservicemanualDocument52 pagesSW5 L30 DservicemanualSorin BodeNo ratings yet
- Phantom or Dummy RACHDocument18 pagesPhantom or Dummy RACHproudpunk100% (1)
- Aucr2017 TIME TABLEDocument120 pagesAucr2017 TIME TABLESiva RamanNo ratings yet
- Ups Keor - SPX LegrandDocument2 pagesUps Keor - SPX LegrandapthorNo ratings yet
- High Frequency Model of A Shielded 4-Wire Energy CableDocument10 pagesHigh Frequency Model of A Shielded 4-Wire Energy CableNancyNo ratings yet
- Guía de Usuario Hisense HLTE 223EDocument10 pagesGuía de Usuario Hisense HLTE 223ERaúl RivasNo ratings yet
- BJT Differential AmplifierDocument4 pagesBJT Differential Amplifierdominggo100% (4)
- 8DJH Produktblatt EN Screen PDFDocument2 pages8DJH Produktblatt EN Screen PDFHung Cuong PhamNo ratings yet
- What Is MetastabilityDocument5 pagesWhat Is Metastabilityaarthi100No ratings yet
- Coursera SA682WVEP78QDocument1 pageCoursera SA682WVEP78Qshilpmehta007No ratings yet
- Datasheet CT 4MDocument2 pagesDatasheet CT 4MYessa FitraNo ratings yet